论文总字数:24148字
摘 要
近年来,公交优先策略成为了城市解决交通拥堵问题的一个重要策略。为了实现公交优先的策略,提高公交出行的优势。越来越多的城市运用先进的科学技术,尽量减少公交车的行程时间。其中GPS系统的运用大大地提高了公交车的服务水平,但是,由于一些自然条件的因素,经常会发生GPS数据丢失的情况。为了解决这一问题,本文通过建立模型,结合已有的GPS历史数据,对公交车的实时运行状态进行预测研究。这对于提高公交车的服务水平具有重要意义。
本文通过对现有公交车运行状态预测模型进行学习,并尝试运用其中的部分模型进行实验模拟。文章选取了支持向量机(SVM)模型、非参数回归模型(K-近邻方法)、卡尔曼滤波模型进行对比研究,对比分析各个模型适合的预测环境,并对其独特的优势和存在的缺陷进行分析。本文的研究成果对推动公交车实时运行状态的预测研究具有一定的作用。
关键词:GPS数据丢失;SVM;K-近邻;卡尔曼滤波;
Abstracts
Recently, the priority of policy concerns that imply for transportation sector is to solve the traffic congestion problem in the city by enhance the bus role advantages. Many cities have used the technology and advance science to improve bus travel by reducing time consuming. There is an disadvantage on using GPS as the signal often disappear or loss due to natural condition factors. This problem can be solve by establishing a new model, through combining the GPS historical data which use to predict future real-time operating status of the bus role. This method would has the important implication for improving bus services.
This paper will presents the existing buses running predictive models to study and apply this model through experimental simulation method. The article has selected several models such as Support Vector Machine (SVM) model, non-parametric regression model (K- nearest neighbor method), and Kalman filter model and conduct analysis and comparison to forecast future environment as well as its unique ability and drawbacks. The prediction results of this study would be used to promote real-time operating status on the bus role.
Key words: GPS data loss; SVM; K- nearest neighbor; Kalman filter;
目录
摘要 I
Abstracts II
第一章 绪论 1
1.1研究背景及目的、意义 1
1.2国内外研究现状 1
1.2.1国外研究现状 1
1.2.2国内研究现状 2
1.3论文主要工作及结构安排 3
第二章 预测模型的研究 5
2.1非参数回归模型 5
2.1.1非参数回归的基本步骤 6
2.1.2非参数回归预测的关键问题 7
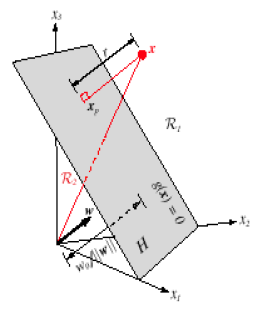
2.2支持向量机(SVM)模型 8
相关理论概述 8
2.3卡尔曼滤波模型 11
相关理论概述 11
第三章 公交车辆GPS数据处理 13
3.1 公交车原始GPS数据获取 13
3.2 数据处理 13
第四章 公交车运行轨迹预测模型应用过程 19
4.1非参数回归(NPR)模型 19
4.1.1预测参数确定 19
4.1.2预测相关参量及模型确定 19
4.1.3预测模型的精度验证 21
4.2支持向量机(SVM)模型 23
4.2.1 LIBSVM软件包介绍 23
4.2.2公交车GPS数据再处理 23
4.2.3实验过程 24
4.3卡尔曼滤波算法 25
4.3.1Kalman滤波预测过程 25
4.3.2基于SVM-Kalman联合预测 26
第五章 结论及展望 28
5.1结论 28
5.2研究展望 28
致谢 29
参考文献 30
第一章 绪论
1.1研究背景及目的、意义
随着城市化进程的推进和居民生活水平的提高,人们的出行需求日益增加。随着城市中机动车数量的指数式增长,带来了越来越严重的城市交通拥堵问题。为了解决这一问题,提高城市整体的出行效率,首先应该考虑公共交通的发展。为了优化公交车的服务水平,国内外各大城市均引入了智能公交系统。智能公交系统运用GPS定位、物联网等多种技术,实时采集、处理、发送各种数据信息,为公众的出行带来了便利。
提高公交车的服务水平,可以通过信号上的公交优先策略来减少延误。比如可以通过对公交车的运行状态进行实时监测,并通过一些算法为其在交叉口提供信号优先服务。GPS定位技术作为公交车实时信息采集的方式,在公交车实时运行状态分析方面占有举足轻重的作用。但是在车辆的运行过程中,可能由于高楼隧道的遮挡等,不可避免地产生GPS数据丢失的现象。当发生GPS数据丢失的情况时,为了保障公交车在交叉口的优先通行权,可以通过建立模型等方式,来对公交车的实时运行状态进行预测研究。
本文针对公交车在运行过程中GPS数据丢失问题展开研究,学习现有GPS数据丢失处理方法,对现有方法的优点与不足进行归纳对比,基于现有南京市公交车GPS数据,对历史GPS数据进行统计分析,利用回归模型对公交车位移轨迹进行拟合,构建基于GPS数据丢失的高精度公交车运行轨迹预测模型。在实时公交车GPS数据的基础上,借助本文构建的预测模型对公交车运行轨迹进行预测,并与历史公交车运行轨迹进行对比,从而验证模型的准确性。本文进行的公交车运行轨迹预测研究对提高公交车运行的安全性、有效性以及公交优先策略的实施均有重要意义。
1.2国内外研究现状
近年来,国内外学者对基于GPS的公交到达预测模型进行了深入的研究,主要研究成果综合如下。
1.2.1国外研究现状
Lin和Zen[1]将GPS定位技术与历史数据结合并构件模型,提出基于GPS定时技术的实时公交到达时间预测模型。该模型主要适用于郊区公交出行,更适合应用于行驶畅通的乡村公交线路,不能运用于复杂交通情况的大城市。
Bin Yu, William H.K. Lam[2]等人提出多路径方式预测公交车的到站时间,在模型中通过使用多条路线的巴士的实际运行时间,来预测每条线路的巴士未来的到达时间。作者选择了四种预测模型,人工神经网络(ANN)模型、支持向量机(SVM)模型[3]、非参数回归(NPR)模型和卡尔曼滤波模型,并采用多种指标分析模拟的结果。结果证明,在各预测模型中,支持向量机(SVM)模型的结果是最好的。
Li[4]和 Tetreault[5]等运用回归模型,假设公交车的运行时间受天气情况、路段长度、交叉口数量、路段平均速度、交通流量等多个变量的影响,构造出包含多个自变量的回归函数方程并将回归函数方程作为预测模型,根据自变量在预测时段内的变化对因变量即公交车的运行时间进行预测。
Ehsan Mazloumi , Geoff Rose[6] 等人研究了神经网络预测方法的不确定区间,他们提出了对于神经网络预测公交车到达时间的不确定因素对总的不确定性的贡献率的方法,可以大大提高预测精度,使得预测区间更加准确。
Dalia Tiesyte,Christian S. Jensen[7]提出了最近近邻轨迹模型来鉴别和运行的公交车轨迹最相似的历史轨迹,此历史轨迹将被用来预测此公交车将来的运行状态。
Cathal Coffey,Alexei Pozdnoukhov[8]等根据GPS历史数据,运用最近运行轨迹方式绘制了公交车到达时间可预测性的图,并运用爱尔兰都柏林最具代表性的46A路公交车作为实例验证,取得不错效果。
Wang-Chien Lee,W Si[9]等开发了一个新的公交出行时间预测框架,针对在运行的公交车,提出了基于历史轨迹的行驶/到达时间预测(HTTP)的模型来预测其实时的未来区间的运行时间(到站时间)。HTTP的基本思想是从历史的公交车运行轨迹中找到与当前公交车行驶轨迹“相似”的历史轨迹来预测未来区间车辆的运行状态。
1.2.2国内研究现状
国内学者对该课题也进行了深入研究,并取得了一系列的研究成果。
文雄军[10]等人运用预测内插的算法对丢失的GPS数据进行补充。预测内插算法是对数据丢失点的历史数据进行整合。该历史数据指的是车辆在历史的某天在相同时段相同路段上运行所记录的经验速度。经验速度是大量车辆达到一定概率标准的最大似然速度。如果在20s内没有收到车辆的定位反馈数据,根据经验速度的分布规律,根据车辆在沿线获取的速度与上一次定位到的数据来计算出当前车辆所在的位置数据,从而实现模型数据的内插。
李福双[11]等人采用数据挖掘技术[12]中支持向量机模型作为静态预测模型,根据公交车实时运行速度对预测结果进行实时在线修正,进而预测公交车的运行状态。通过他们提出的模型可以处理复杂的交通状况。
刘义明[13]等人提出了一种基于CAN总线的公交车辆定位方法。该方法通过车载CAN总线对公交车辆运行信息进行提取,通过建立模型,将数据传输到公交总站处的数据处理中心,然后对该车辆实现实时定位。
孙玉砚,刘 燕[14]等提出了一种基于路况相似性的公交到站时间预测模型,其主要贡献是提出了一种基于k-means聚类算法[15]的路段交通状况计算方法,对公交车辆历史运行数据进行分析,并评估公交线路各个路段的实时交通状况。提出了一种基于Tanimoto系数的路况元组相似度计算方法,综合考虑路况相似度,在最相似时间、距离的候选历史行程记录中,挑选多个路况中最相似的行程记录,来预测公交车辆到站时间。
Kalman滤波[16]算法可以使用周期性的数据来预测公交车辆在站间的行驶时间,可以用于预测的数据是车辆在其他出行日的同一时间段数据,但该数据可能变化幅度和趋势与缺失数据不是非常一致。所以,通过改进Kalman滤波预测的变化幅度值,对由于一些不确定因素导致车辆运行时间产生波动进行估计。李文[17]等提出改进的Kalman滤波模型,可以对车辆到达下游站点的时间进行预测,不适用于行驶过程中的时间预测。
1.3论文主要工作及结构安排
本课题主要从通行效率角度出发,在GPS数据丢失的情况下,需要根据大量的数据来分析公交车的运行状态。并根据得到的结果对公交车在数据丢失的情况下进行运行状态的预测。为了较为精确地预测公交车的运行状态,可以通过建立模型的方式,根据公交车运行数据,对在公交车丢失GPS信号的路段,对公交车的实时进行运行状态进行预测。
1.公交车实时运行状态预测模型的学习
在本课题中,对于公交车的实时运行状态的预测,需要借助模型来进行预测。在已经存在的各模型以及预测方法中,有支持向量机(SVM)模型非参数回归(NPR)模型和Kalman滤波模型等。本文将会利用这三种模型分析,来预测公交车的实时运行状态。并采用MAE(平均绝对误差)、MAPE(平均绝对百分误差)、RMSE(均方根误差)等指标的平均值对预测结果进行分析。
2.基于GPS数据丢失的公交车运行状态数据的处理
本文在预测的过程中,需要处理大量历史以及实时的公交车运行状态的数据。本文根据所获得数据的特点,选择GIS等软件,对公交车运行状态的数据进行处理。此软件将被用于整合南京市河西地区的地图、某公交干线的路线图、公交车实时定位数据。基于现有南京市公交车GPS数据,对历史GPS数据进行统计分析,得到公交车的运行轨迹以及其运行状态,然后利用上述回归模型对公交车位移轨迹进行拟合。
3.构建基于GPS数据丢失的高精度公交车运行轨迹预测模型
本文的关键是提高预测模型的精度,构建基于GPS数据丢失的高精度公交车运行轨迹预测模型。在这一部分将会根据此前预测模型得到的结果,思考能否提出可行的方式来提高预测的精度。对于构建出的新模型,将用于公交车运行轨迹的模拟预测,并根据得到的结果分析该模型的优势和不足。
本文的研究路线如下图1-1所示:
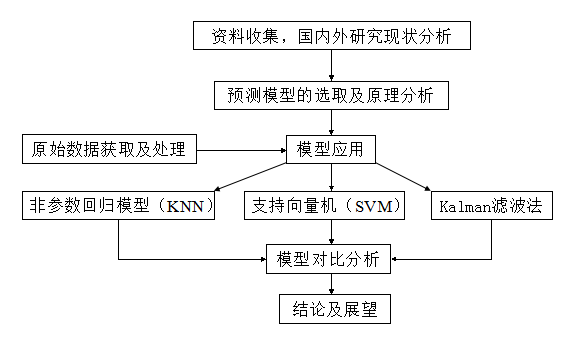
图1-1研究技术路线
第二章 预测模型的研究
2.1非参数回归模型
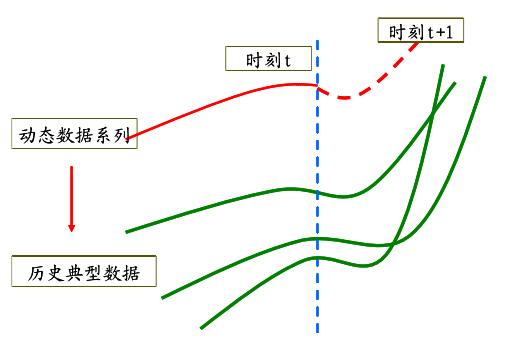
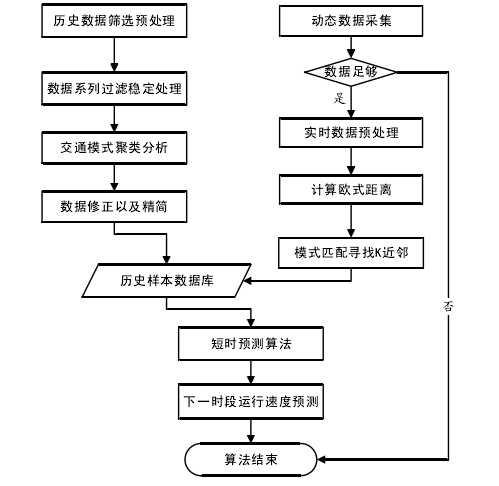
非参数回归模型通常被认为是一种处理非线性动态系统以及不确定性系统的仿真分类预测方法[18]。一般来说,非参数回归的主要远离就是通过大量的有针对性的分析实验的历史数据,得到一个有代表性的历史数据集合。通过分析历史数据的形成以及发展演变过程,可以从经验的角度分析出典型交通状态的变化规律并对将来有可能出现的状况进行预测。通过对当前的交通数据进行实时采集并对采集到的数据进行有效性分析并加以修正处理,将处理后的数据与之前分析的历史数据进行对比匹配,找到历史数据中最接近实时采集数据的一组将其命名为K组数据。根据所找到的K组数据邻近的变化发展趋势来确定实时数据中相应的下一时间段交通状态的情况。以上是非参数回归模型的基本方法。
剩余内容已隐藏,请支付后下载全文,论文总字数:24148字
相关图片展示: