论文总字数:32458字
摘 要
GPS技术可以覆盖全球且获取的数据精度高,已经成为现在获取动态交通信息的重要手段和未来发展趋势。同时,近年来,公交优先手段成为解决城市交通拥堵问题的主要措施。借助公交车载GPS系统获取公交车的实时交通信息数据,我们可以提前预测公交车到达节点的时间。接着,运用这些信息,采取相应的优先措施,就能真正做到城市公交优先。
公交车的实时GPS数据以车辆的空间坐标信息为主。将车辆实时的GPS数据与城市道路网络相匹配则是准确预测公交车辆到达优先节点的前提条件,也是关键步骤。本文通过Oracle数据库,处理了获得的南京市秦淮河以西的水西门大街至江东路上的公交车辆GPS数据;将表示在WGS_1984坐标系中的GPS定位结果通过ArcGIS匹配到相应地区的数字地图中;接着基于公交车GPS数据和公交网络信息提出高精度的地图匹配综合算法,并且借助 Microsoft Visual Studio集成开发环境,载入ArcGIS Engine软件开发引擎,采用C#语言对ArcGIS Desktop进行自定义开发,实现了GPS点移动到公交路网上的纠偏匹配,最终得到公交车的实际运行轨迹。
关键词:GPS数据处理,地图匹配,智能公交系统,ArcGIS,Oracle
A STUDY ON THE PREDICTION OF REAL-TIME TRAJECTORY
BASED ON GPS DATA OF BUS
Abstract
Application of GPS technology in displacement vehicles has been mature. It has become a new way to obtain real-time traffic information because of its short construction period, large coverage, and high precision data. At the same time, bus priority has become the main measure to solve traffic problems. Obtaining real-time traffic data by means of GPS system in bus, and then predicting the arrival time of bus, taking corresponding priority measures, we can finally realize priority of bus in the city.
Real-time GPS data of bus mainly consist of vehicle space coordinate data. Matching the vehicle real-time GPS data with map of road accurately is a prerequisite for the accurate prediction of arrival time of bus, which is also a key step. In this research, we deal with the Nanjing Qinhuai River to the west of the water Simon Street to the river road public transit vehicle GPS data by Oracle database; then those GPS data has been expressed in the WGS 1984 coordinates by ArcGIS , and matched to corresponding area of digital map; then we proposed a high-precision map matching algorithm according to these bus GPS data and bus network information; in the end, with the help Microsoft Visual Studio loaded ArcGIS Engine, using C# language of ArcGIS desktop for custom development, we realized the map matching of the bus GPS point, finally get the buses’ actual trajectory.
KEY WORDS: GPS data processing, Map matching, Intelligent Bus System, ArcGIS, Oracle
目 录
第一章 绪 论 3
1.1 研究背景 3
1.2 研究目的及意义 4
1.2.1 研究目的 4
1.2.2 研究意义 4
1.3 研究方法及技术路线 4
1.3.1 研究内容与方法 4
1.3.2 技术路线 5
第二章 研究综述 6
2.1 GPS数据处理研究现状 6
2.2 地图匹配算法研究现状 6
2.2.1 国外研究现状 6
2.2.2 国内研究现状 7
2.3 现有研究成果总结 7
第三章 公交GPS数据分析 9
3.1 GPS与GIS技术的原理和应用 9
3.1.1 GPS定位原理和误差来源 9
3.1.2 智能公交系统中的GPS技术 9
3.1.3 GIS地理信息系统 9
3.2 公交GPS数据预处理 9
3.2.1 异常数据的过滤 9
3.2.2 坐标变换 10
第四章 GPS地图匹配算法研究 12
4.1 GPS地图匹配概述 12
4.1.1 地图匹配定义及原理 12
4.1.2 常用的地图匹配算法 12
4.1.3 常用地图匹配算法总结 13
4.2 GPS地图匹配技术 14
4.2.1 误差区域的确定 14
4.2.2 路段匹配的确定 15
4.2.3 综合算法 15
第五章 基于南京公交GPS数据的实际应用 17
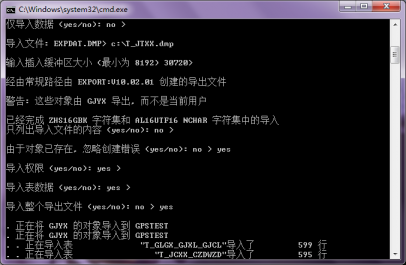
5.1 从Oracle中导出GPS数据 17
5.2 将GPS数据导入ArcGIS 21
5.3 公交GPS轨迹匹配 23
5.4 评估及分析 26
第六章 总结与展望 27
6.1 研究成果 27
6.2 未来工作展望 27
6.3 应用前景 27
致谢 31
附录 32
绪 论
1.1 研究背景
自20世纪末以来,我国交通系统得到突飞猛进地发展,新建道路及其配套基础设施数量与日俱增。但这些变化并没有有效缓解机动车数量迅猛增长所带来的交通压力。由于道路基础设施的建设速度受到土地的限制,其发展速度不及机动车的增长速度,因此交通需求与道路交通供给之间的矛盾日益突出,从而造成了城市道路中日益严重的拥堵现象。我国城市交通拥堵问题的主要解决方法集中在加强交通管理控制、引导交通流量在路网中合理分布、提高城市道路的利用率等。我们需要建立信息化的交通管理系统,对道路上的交通流进行科学、有效地管理,提高对现有道路资源的使用效率,从而解决交通拥堵问题。
智能交通系统是一种把先进的信息技术、数据通信技术、电子控制技术以及计算机处理技术等综合应用于地面交通管理体系,从而建立起一种大范围、全方位发挥作用,实时、准确、高效的交通运输管理系统。智能交通系统的能够根据所获得的实时信息不断地优化交通系统的控制策略和调整各类交通参与者的行为,实现交通系统的优化运行。准确的获得实时的交通信息和状态是智能交通系统工作的基础。常用的交通状态和信息获取手段主要有感应线圈、视频摄像头和微波雷达测速等。但是由于位置固定的限制,这些交通信息获取手段存在如下两方面的局限。
- 由于人力、资金、环境等条件的约束,交管部门只在关键路段和主要路口设置了固定检测器,实际铺设远小于实际需求量,有很多地方无法检测到。
- 有些检测手段需要特殊的环境并且容易发生故障,比如线圈检测器,需要铺设在地下,还容易受到雨雪天气的干扰,在非正常的天气状况下极容易出现故障。
然而,全球卫星定位系统(GPS)弥补了传统检测设备的缺陷。随着装备GPS的车辆数量的不断增加,我们可以采用GPS获取的数据进行移动车辆和交通流的实时监控。这种监控不受时间、位置的影响,并且能够获取车辆的位置、速度、时间等多种信息。
除了利用智能交通系统实现交通流在路网上的合理分布,以及交通系统整体的优化运行来缓解城市交通拥堵现象之外,采取优先发展公共交通措施成为解决拥堵问题的又一有效途径。但是,随着城市化进程不断加快,对公共交通的需求量不断增加。为了提高服务水平,各城市的公交车辆的数目增加、公交线路延长、公交班次增多,这些反而从另一方面加重了城市道路的拥堵现象。反过来,也正是因为交通拥堵,才造成公交车辆服务水平和运行效率的降低。发车间隔不均匀,乘客滞留和空车运营的现象屡见不鲜。传统的公交调度系统是采取固定时刻发车的方式,然而这种方式是无法监测和控制公交车辆在运营线路上的行驶状态,并实时做出及时调整的。
但是,如果能够将智能交通技术应用到公交领域,我们就能够精确定位运营线路上的公交车辆,就能够实现公交车辆的全程监控和实时调度、指挥,从而做到公交运力合理配置,提高公交企业工作效率,提高公交服务质量。一方面,GPS系统可以为公交车辆和驾驶员提供及时的信息;另一方面,公共交通管理系统也通过它获得公交车辆在路网中的定位与相关交通信息,这些公交车辆的当前交通反馈信息可以用来做管理决策和行程时间预测。要想实现GPS系统在公交车辆上的应用,提高GPS定位数据精度和可靠性的相关研究是不可或缺的。
1.2 研究目的及意义
1.2.1 研究目的
本文的研究目的是借助公交车的车载GPS系统,获取公交车实时交通信息数据,提前预测公交车到达节点的时间,采取相应的优先措施,真正做到城市中的公交优先。
公交车实时GPS数据以车辆空间坐标数据为主,将车辆实时GPS数据与实际城市道路地图高精度的匹配则是准确预测公交车辆到达优先节点的前提条件,也是关键步骤。具体而言,地图匹配就是通过用户的一系列GPS位置——我们称之为轨迹,来确定地图上的用户路线的方法。它将车载GPS接收机所获取到的当前公交车辆的位置信息与电子地图中存储的信息联系起来,然后通过匹配算法修正车辆的位置偏差信息,从而获得并显示公交车辆在城市道路网络中的准确位置。
本文主要任务是通过Oracle数据库,处理了获得的南京市秦淮河以西的水西门大街至江东路上的公交车辆GPS数据;将表示在WGS_1984坐标系中的GPS定位结果通过ArcGIS匹配到相应地区的数字地图中;接着基于公交车GPS数据和公交网络信息提出高精度的地图匹配综合算法,并且借助 Microsoft Visual Studio集成开发环境,载入ArcGIS Engine软件开发引擎,采用C#语言对ArcGIS Desktop进行自定义开发,实现了GPS点移动到公交路网上的纠偏匹配,最终得到公交车的实际运行轨迹。
1.2.2 研究意义
本研究通过对公交车GPS数据的分析,解决实际工程应用中GPS数据利用的问题,实现新技术、新方法与智能公交的结合;提出基于公交GPS数据的地图匹配综合算法,为建立智能公交GPS定位系统提供理论依据。这些工作满足了智能公交日益发展的需求,对改善我国的交通状况方面有重要的意义。此外,通过地图匹配技术,我们可以获得公交车辆的实时位置信息,从而得出公交车量在某个特定路段上的运行时间。根据该运行时间能够做到用户出行行程时间的预测,引导出行者对不同路径做出的不同选择。
1.3 研究方法及技术路线
1.3.1 研究内容与方法
从内容上,本研究主要是处理获得的南京市秦淮河以西的水西门大街至江东路上的公交车辆GPS数据。将表示在WGS_1984坐标系中的GPS定位结果通过ArcGIS匹配到相应地区的数字地图中。提出适用于该路网的地图匹配算法,并且借助 Microsoft Visual Studio集成开发环境,载入ArcGIS Engine软件开发引擎,采用C#语言对ArcGIS Desktop进行自定义开发,实现了GPS点移动到公交路网上的纠偏匹配,从而得到公交车运行轨迹。
本论文的研究方法主要是仔细研读和学习相关文献资料,在理论学习的基础上结合实际获取秦淮河以西的水西门大街至江东路上的公交车辆GPS数据进行应用实验。研究方案如下:
- 通过对现有文献的检索和学习,了解地图匹配算法发展概况;
- 通过对相关文献的阅读,深入理解地图匹配算法的内在特性;
- 通过学习相关知识,掌握GPS数据采集思路和Oracle数据库以及ArcGIS的使用方法;
- 提出适用于南京市秦淮河以西的水西门大街至江东路上的公交车辆GPS数据的地图匹配算法;
- 对所获得的公交车GPS数据进行处理及实际应用。
1.3.2 技术路线
本研究的技术路线如下图所示:
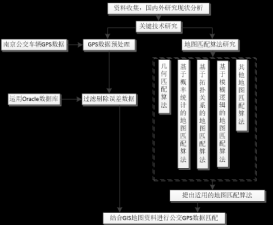
图1-1 技术路线示意图
研究综述
2.1 GPS数据处理研究现状
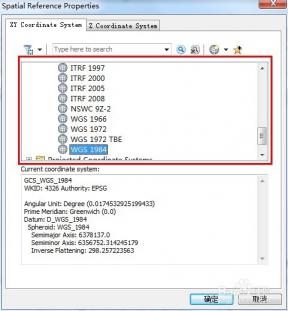
GPS卫星定位系统采集到的坐标(B,L,H)是1984年世界大地坐标系的坐标,即WGS_1984。其中,B、L、H分别表示纬度、经度和高度,特别说明的是H表示的是定位点到WGS-84椭球面的高度,是地心坐标系。但是目前测量绘制地图所用的坐标系是参心坐标系,常见的有1954年北京坐标系或1980西安坐标系。局部和个别地区使用的是地方独立坐标系。因此,在进行地图匹配工作之前,我们必须对获取的GPS数据进行预先处理,将GPS数据与待匹配地图所使用的坐标系相统一。一般是将GPS数据所使用的WGS- 84坐标转换成我们测量区域实际使用的坐标系。 [1]
Vanicek,Krakiwsky(1982)为了将不同的大地网统一于同一坐标系,提出了Veis相似变换模型,这也成为通用的坐标转换方法。首先根据至少3个公共点坐标求出7个转换参数,包含3个平移参数、3个旋转参数和1个尺度参数。然后根据这7个转换参数进行坐标系的变换。[2]
张项铎(1997)提出运用传统的几何法(公共点法)进行 GPS坐标转换,必须有实际联测点,但是联测工作量的增加会降低GPS的使用效率。因此他利用全球大地水准面推算平移参数进行WGS_1984转换。该转换参数可在山区、丘陵地区隧道、城市地铁和其他工程测量以及大地测量的各类GPS网的坐标转换中应用。[3]
杨元喜,徐天河(2001)提出不同坐标系统的相似变换法会忽略坐标系统间的差异,因此不能保证低精度的坐标与高精度的坐标统一后,维持坐标精度不降低。为了解决这一问题,他们将相似变换与回归逼近相结合,有效的提高了统一后的坐标框架的精度。[4]
董玉磊(2007)在其硕士论文中提出,传统方法高斯最小二乘法由于在其约化过程中,存在误差积累现象和方程组可能病态的问题,从而降低所得结果的精度。因此他提出了运用遗传算法处理病态问题,用遗传算法求取转换参数、尤其是在法方程组病态的情况下求解转换参数。[5]
2.2 地图匹配算法研究现状
2.2.1 国外研究现状
20世纪70年代,早期的常规路径匹配算法由两个美国研究小组和一个英国研究小组分别。但是由于复杂的道路环境和多方面误差的影响,我们很难确定车辆一定行驶在哪个特定的街道上。[6]
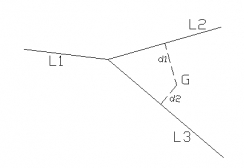
Najjar 和 Bonnifait(2003)为了提高地图匹配的效率,提出了一种基于D-S证据理论的匹配算法。该算法有两个主要参考因素:1. 车辆和待匹配道路的距离;2. 车头转向与待匹配道路的夹角。该算法通过综合考虑了位置和方向信息获得最佳匹配道路。[7]
加拿大卡尔加里大学的 Cannon(2004)提出了一种基于模糊逻辑的匹配算法。该算法能将输入数据中不确定性转换成输出的确定性结果。这一特性能使该算法在城市道路密集区域仍然保持地图匹配的高精确度。[8]
微软亚洲研究组的Yin Lou,Chengyang Zhang,Yu Zheng(2009)针对低采样率的GPS轨迹,提出了一个新的全球性的地图匹配模型,叫做ST-Matching。ST-Matching同时考虑到空间路网的几何和拓扑结构,以及轨迹的时间/速度限制。[9]
新加坡国立大学的Shunkai Fang,Roger Zimmermann(2011)提出了一个新的基于改良地图匹配的节能GPS轨道数据获得方法。在提供高精度轨迹数据的同时减少能源消耗。为了提高精确性,EnAcq利用一个改良隐马尔科夫模型(HMM)——基本地图匹配模型,可以不用传统所必须的范围询问就找到符合每一个GPS位置样本点的候选,而且确定移动设备(在车辆中)所经过的最可能的路径。为了避免不必要的能源浪费,EnAcq采用自适应的GPS采样方法,它能基于设备现在的运动状态改变采样时段。[10]
Velaga Nagendra R.,Nelson John D.和 Edwards Peter等(2013)为了在任意给定时间点,提供一个准确的车辆位置,研究出了一种使用了模糊逻辑地图匹配模型并将GPS数据域GIS路网地图相匹配。 [11]
美国斯坦福大学的Li Yang,Huang Qixing和 Kerber Michael等(2013)通过观察,总结出在人类和车辆的日常行动所产生的轨迹中一些有规律的图案。在路网中,所有可能连接的K部分里(比如总长是大约K单位的沿着路网的角),一个典型的轨迹收集只需要利用一个很小的部分。从而提出了地图匹配的新方法,该方法优化了输入轨迹的预期路径,这样需要使用的K部分就减少的最小了。与此同时通过交替优化来实现高效计算并设立了一个基准来评估不同算法的表现。[12]
2.2.2 国内研究现状
张巨等(2000)提出了一种利用GPS历史数据的地图匹配算法。该算法的包括初始定位和动态定位。首先提取10个以上的历史数据连成线后进行曲线匹配,从而得到当前车辆行驶的路段,这个过程叫做初始定位。接着,计算当前GPS轨迹点与上一GPS轨迹点的距离,利用该距离进行路线搜索,得到相对应的匹配路段,这个过程叫做动态定位。[13]
王冬晖等(2003)提出了基于类投影的地图匹配算法。由于基于投影的地图匹配算法存在两点局限性:1. 直接投影产生投影点不一定在道路中心线上;2. 在曲率较大的道路上进行直接投影,容易导致GPS点对应的投影点偏离道路中心线。因此,王冬晖提出,可以不直接作投影,而是以GPS位置点画圆,然后以圆内直线的中点作为投影点,从而避免直接投影算法的局限性所造成的误匹配。[14]
剩余内容已隐藏,请支付后下载全文,论文总字数:32458字
相关图片展示:


该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

