多智能体系统与海上风电场分布式协同与优化控制研究毕业论文
2020-02-19 14:59:50
摘 要
随着清洁能源的兴起,越来越多学者开始研究风能,对比于陆上风电场,海上风电场环境更为复杂,建设海上风电场需要考虑的方面更多。本文将海上风电场与多智能体结合,每台风力发电机是一个智能体,也是整个通讯网络的一个节点。本文将对单个智能体(双馈式变桨变速风力机)的控制系统进行优化,以提高海上风能的利用效率与风电机的控制性能。同时也将研究基于哈密顿原理的分布式协同控制,其使多智能体系统更安全可靠,当单智能体发生故障时,智能体系统其他非故障部分依然能有效工作。通过对风电场建设费用及收益的估计和风电场环境的分析,了解风电场研究的必要性。通过对智能体、风力机控制系统、分布式协同控制的理论研究及相关仿真,证明分布式协同控制可以使风电场具有更高的安全性和可靠性。
关键词:多智能体、风力发电机、解耦转矩控制、模糊变桨控制、分布式协同控制
Abstract
With the rise of clean energy, more and more scholars have joined the research on wind energy. Compared with onshore wind farms, the environment of offshore wind farms is more complex, and more aspects are considered in the construction of offshore wind farms. Combining offshore wind farms with multiple agents, each wind generator is an agent and a node in the entire communication network. In this paper, the control system of a single agent (doubly-fed variable pitch wind turbine) is optimized to improve the utilization efficiency of offshore wind energy and the control performance of wind turbine. Distributed cooperative control based on Hamilton principle makes multi-agent system more secure and reliable. When a single agent fails, other non-failure parts of the agent system can still work effectively. The necessity of wind farm research is known through the estimation of wind farm construction cost and income and the analysis of wind farm environment. Through the theoretical research and relevant simulation of the agent, wind turbine control system and distributed cooperative control, it is proved that distributed cooperative control can make wind farm have higher security and reliability.
Key words: multi-agent, wind turbine, decoupling torque control, fuzzy impeller control, distributed cooperative control
目 录
第1章 绪论 1
1.1 选题意义 1
1.2 国内外现状 1
1.2.1 国内现状 1
1.2.2 国外现状 2
1.3 海上风电前景分析 3
1.4 章节安排 3
1.5 本章小结 4
第2章 基本原理 5
2.1 图论基础 5
2.2 风电场相关参数 6
2.3 本章小结 8
第3章 单agent的优化控制 9
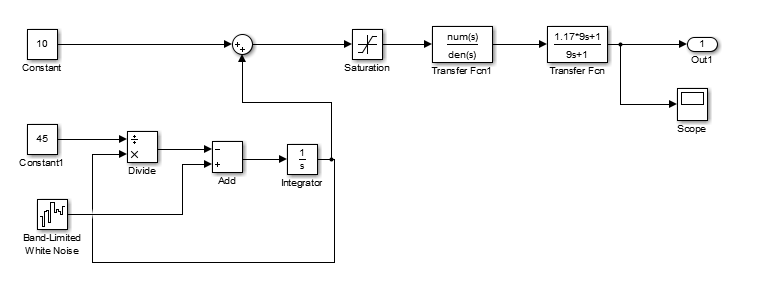
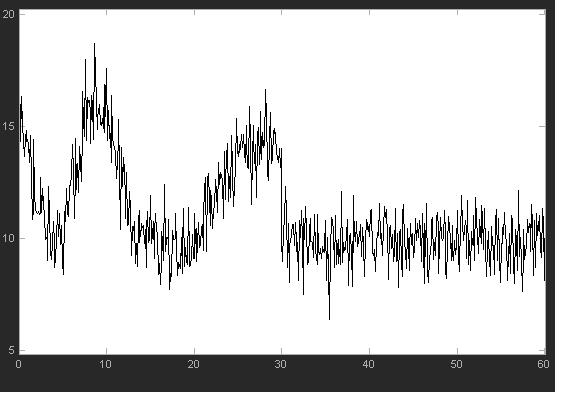
3.1 风的仿真 10
3.2 解耦转矩控制 11
3.3 模糊变桨控制 13
3.3.1 风电机组的数学模型 13
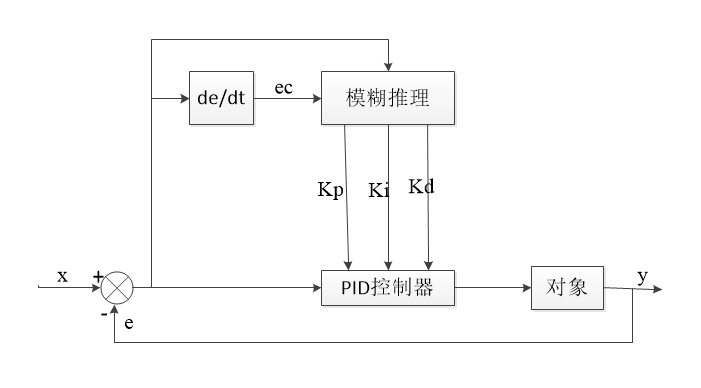
3.3.2 模糊PID控制 14
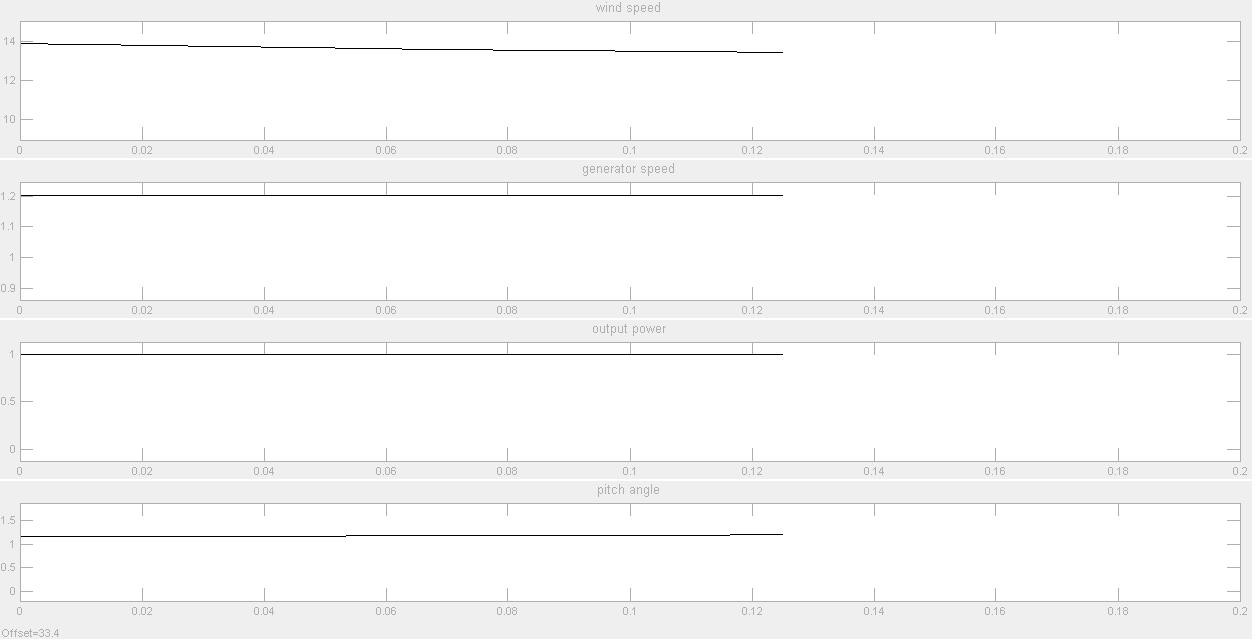
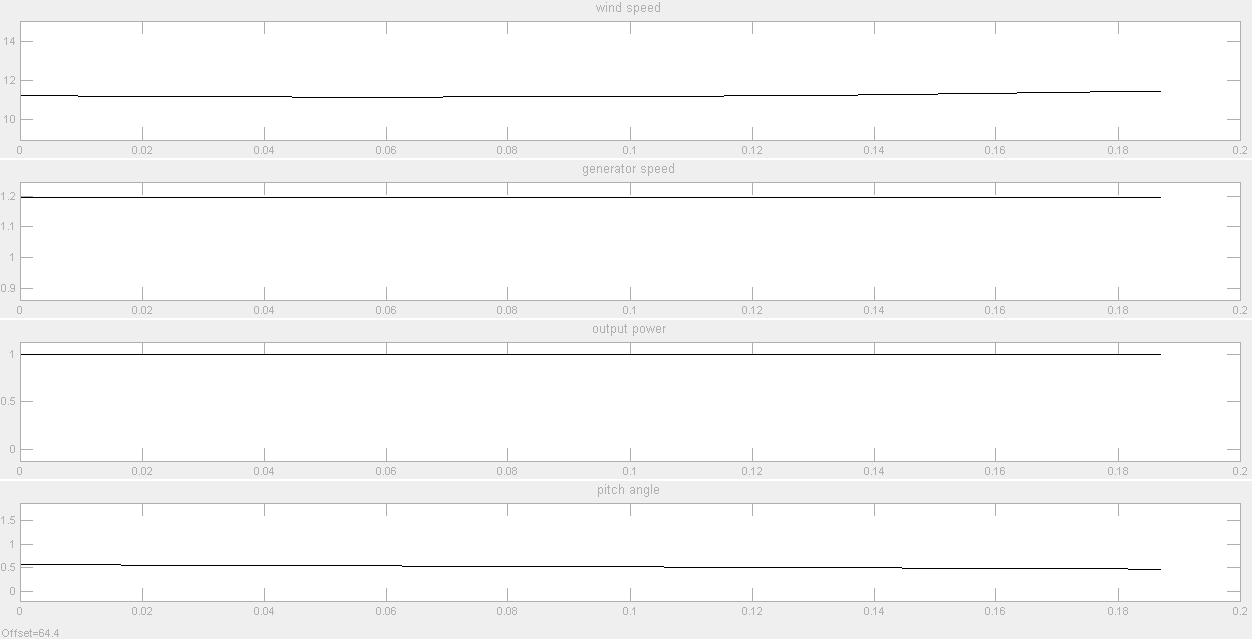
3.3.3 仿真结果分析 17
3.4 本章小结 19
第4章 多agent的分布式协同控制 20
4.1 多智能体系统 20
4.1.1 风力涡轮机 21
4.1.2 海上变电站 21
4.1.3 电缆 22
4.2 单agent的哈密顿实现 23
4.2 多agent的协同控制策略 25
4.3 本章小结 28
第5章 经济环境分析 29
5.1 资本支出 29
5.2 环境分析 31
6总结与展望 32
6.1 全文总结 32
6.2 工作展望 32
参考文献 34
致谢 36
第1章 绪论
1.1 选题意义
我国海岸线约长1.8*107 m,有海岛六千左右,海上可开发利用的风力资源储量约为7.5*1011W。我国大多数近海海域90米高度的年平均风速在7m/s左右,具备良好的风能资源。海上风场大多建在沿海100-200公里以内,距电力负载中心近,能有效降低电力运输成本和损耗。海上风速高、可利用时间长约3000小时以上,海风的湍流强度低,机组运行稳定,寿命长,单机容量以2.5-5MW为主,适合大规模开发建设海上风电场。
海上风电的输送和海上风电场动态稳定性对电网的影响较大,海上风力发电场建设的技术难度较大,投资成本高。为了降低海上的恶劣环境的影响,风电机组必须采取气密、干燥和防腐等各种技术措施。在进行海上风电场维护时将使用大型维护船等高成本设备。因此在进行海上风电场的设计及建设时应从多方面考虑以提高海上风电场的稳定性、发电效率、设备的使用寿命等[1]。
为了更大化利用海上风能资源,可以增加风力涡轮机的数量及风电场的个数,也可以提高单台风电机的工作质量,还能将风电场与多智能体系统结合起来进行优化等。提高单台风力发电机发电质量的手段有很多,本文将通过对单台风力发电机控制系统的优化来提高风电机的发电质量。多智能体系统(MAS)的显著特征是:系统中每agent的能力有限,而大量agent聚集到一起,通过相互作用就会产生更有意义的社会活动或完成单个agent所不能完成的任务。因此MAS研究领域中一个重要的问题就是设计正确的控制策略,完成给定任务。分布式控制系统是空间分布的动态系统,在海上风电场中,可将整个风电场作为一个分布式网络,每台风电机是网络中的一个节点,节点与节点间的通讯线路构成通讯网络。整个系统通过网络连线彼此交换信息,在此基础上设计风电机组的控制律——分布式控制策略。分布式控制分散了集中式控制存在的风险,即使单台风力发电机出现故障,也不会影响海上风电场的整体运行,可将故障损失降到最低,增大风电场的工作寿命。
1.2 国内外现状
1.2.1 国内现状
我国海上风电起步晚,海上风电项目主要分布在东部沿海区域。2007 年,我国在渤海安装第一台1.5MW的海上风力发电机组。3年后,上海东海大桥风力发电项目完美竣工并开始工作,这标志着我国海上风电行业进入发展阶段[2]。我国2011—2018年海上风电累计装机容量如图1.1所示,由图1.1知,我国每年装机容量都有增加,且2016后每年增幅明显。预测2019年中国海上风力发电累计装机容量将达到423万千瓦,并在2023年突破千万千瓦,达到1067万千瓦。
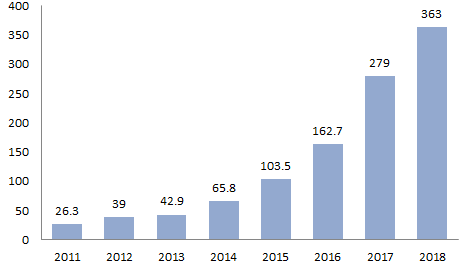
图1.1 2011-2018中国海上风机装机容量
1.2.2 国外现状
第一台海上风电机组于瑞典安装,时间是1991年的前一年,仅是试验性的。它距离海边线350 m,水平面以下6 m,单机容量为220 kW。世界上第一个海上风电场被建在波罗的海(1991年),是国家丹麦所建,具体是在波罗的海的洛兰岛西北沿海,它据说拥有11 台风电机组(配置为450 kW),供电户数是多少呢?范围在2000~3000 之间。9年后,MW 级风电机组开始在海洋表面上被操作,从此,这样的项目开始具备了使用价值(于商业而言)。两年之后,世界上第一座大型海上风电场又被丹麦于北海周围建成,该电厂一共组成了2MW的风电机组,数量竟然是80台,装机体积满160千 kW。随后,瑞典都陆续进入到海上风电场的布局,紧紧相随的还有德国、英国、比利时、法国等诸多位于欧洲的政治实体。
英格兰海上风力发电虽然起步比丹麦晚,但优势明显:一是资源且是海上风能资源与众不同,二是国家政策健全且扶持力度之大,其发展成功度远非丹麦人所能及。英国于2000年最后月份布局建设风电场于海上,目前在这个领域中属于强者。英国在自己的水域内拥有的天然资源于欧洲总体的资源来说,那是相当之大,其来自海上的风能接近1000TWh。2年前,英国海上风电全年相加装机体量达到6836MW,在世界所有国家中,海上风力发电的消费者份额的36.3%,装机体量地球上第一。
德国受海洋法之国家法律所困,在距离岸边15海里范围内,开发海上风电被禁止,因此其关于造价的算计大大高于丹麦和荷兰的同种产品。虽然德国海上风电起始点在时间上不领先,但有个支持(所谓的政策),其进展态势却不可低估。到2017年底时,德国总共海上风机装机体量过线5350MW,位居世界第二[3]。
丹麦是最早利用风力发电的国家之一,于1891年开始研究海上风电。106年后,丹麦的行政部门计划了计划,是关于海上风电的。以2010为起点,丹麦积累的装机量居于欧洲的数量之前,1年后海上风电处于巅峰时间点,地球上无人能及。2017年,丹麦“辞退”了某些风电机组,这些的容量为5MW,结果海上风电相加装机体量是为1266MW,市场份额之于全球海上风力发电的百分比为6.75。
1.3 海上风电前景分析
2018年,全球开发了多个大型的海上风电项目,新建的海上风力发电项目融资178亿元上下。随着地球上关于风力发电之于海上的事业的开发和非成熟的市场的凸起,全球海上风力发电前景未来十年年均复合增长率将达到17%左右,预测2030年全球海上风电的累计装机容量将达到154GW。与该同时,一是由于硬件技术的长进所致使的成本降落,二是因为政策机制设置之臻美,其销售价格的态势是下降的。2017年,德国关于海上利用风力来产生电的项目采用了第一个“零补贴”招投标之项目,该风电场在时间上最早将于7年后投入生产以及正式运营;邻国荷兰开展同样的项目(即“零补贴”)招标,选中的项目产品的价格将会进行低于或等于市场零售价格。基于GWEC的猜测预想,由于产业逐渐成稳重、硬件和软件上的臻美、投资者高估市场,附加新一代可以大扫风表面和大发电量的风机种类之引来进入和位置部署,关于电价,不过是未来5年的,却将是过去5年的50%,并且这一价格下降态势很可能会一直延续[4]。
1.4 章节安排
第一章绪论介绍选题的意义、国内外现状及海上风电的发展前景。我国海上风能资源丰富且风电优势明显但利用困难,为了提高风能利用率可以将风电场与多智能体结合起来,通过分布式协同控制增加风电场的可靠性,降低风电场的建设难度。
第二章将对风速的仿真、海上风电场的尾流效应、风电并网、风电场以及多智能体进行简要介绍,这样题目《多智能体系统与海上风电场的分布式协同与优化控制》有更好的理解。
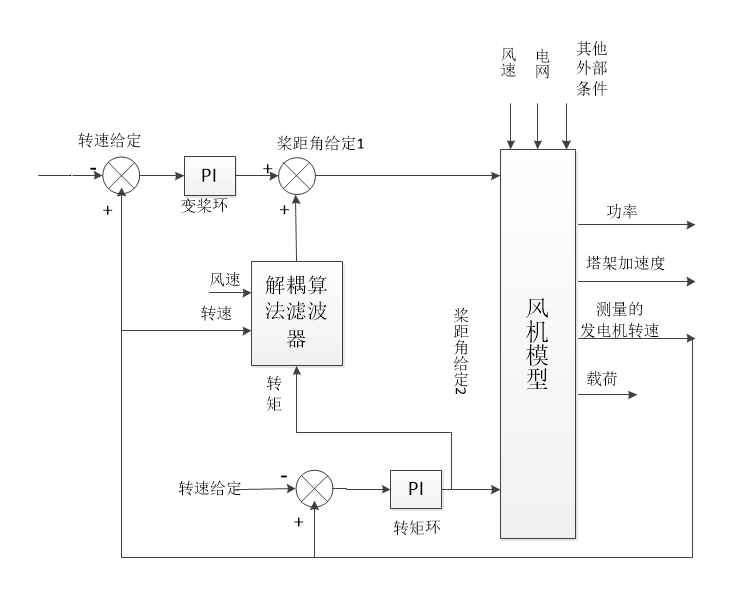
第三章将介绍单个智能体的优化,即双馈式变桨变速风力发电机的优化,本章采用了解耦转矩控制策略和模糊变桨距控制策略对风电机的控制系统进行优化,解耦转矩控制能提高风能的利用率,模糊变桨距控制也能控制输出功率保持额定值不变。
第四章将介绍风电场的协同控制,将哈密顿原理与分布式协同控制相结合使多智能体系统能同步输出,同时,当单个智能体发生故障时,系统中其他非故障部分依然能有效工作。
第五章以荷兰风电场为例通过对该项目支出的分析了解风电场在经济方面的影响,同时也对风电场对环境的影响进行分析。
第六章对全文的优点和缺点进行总结,并对未来风电场的研究提出自己的见解。
1.5 本章小结
本章第一节介绍了选题的意义,其若应用于实际将极大提高海上风能利用率;第二节介绍了国内外现状,风电的研究比较晚,但在各国的发展都比较快;第三节介绍了海上风电场的前景,其具有很大的发展空间;第四小节介绍了各章节的安排。
第2章 基本原理
2.1 图论基础
图论是多智能体系统的基础,agent间的通讯网络通常采用图论中的拓扑结构进行建模。有向图g=(v,ε,A)由节点集v={v1…vn},一系列边或连接弧ε⊆vⅹv,以及邻接矩阵A=[aij]∈Rnxn来表示。(vj,vi)是图g的一条有向边,节点vj是结点vi的父节点,即表示发出的消息vi可以接收到,∀(vj,vi)∈ε,∃(vi,vj)∈ε,那么就可以称图g为无向图。定义Ni={vj:(vj,vi) ∈ε}为vi的邻域,邻域中的各个节点间通过弧进行连接。对∀(vj,vi)∈ε,其邻接矩阵∃aij≥0,当且仅当节点vj是vi的邻居时aijgt;0,为了方便定义aij=1。定义度矩阵为对角矩阵D=diag(d1,d2…dn),其中为vi的边数,对应拉普拉斯算子矩阵L=D-A,L∈Rnxn,且各行之和为0[7]。
考虑含5个agent的MAS,其有向拓扑图结构图如图2.1所示。
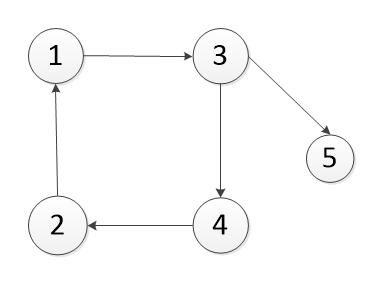
图2.1 有向拓扑结构图
根据以上定义,即可求得拓扑图对应的矩阵和矩阵,其表达式如下:
有向图g中若存在一系列有向边,其表示一条有向道路,从到。若,此则此道路为环形的。对于有向图而言,若节点到间是强连通的,则存在从到的有向道路,也存在从到的有向道路。对于无向图而言,若任意两节点间都有道路,则此图为连同的。
若有向图g中除根节点外,其余节点有且仅有一个父节点,若存在一个根节点,使得根节点可通过一条有向道路到达图中其他任意节点,则称此图为有向生成树。对于有向图)和来讲,若且,则可称为的一个子图。明显可知,有向图g中的一个有向生成树即为g的一个有向树,且满足。本文的MAS通过图进行表述,那么相应的根据机组状态信息和功率特性划分的不同类型就可被看成其子图),拥有类似的性质。
用有向图进行描述MAS,其对应的矩阵L则具有如下性质:
当且仅当有向图的矩阵L存在一个有向生成树时,矩阵L有一个零特征根,对应的特征向量为,其余特征根均含有正实部。在有向生成树中,根节点与其他节点都有向相连,则其对应的L矩阵形式可表示为:
式中,,当且仅当时gt;0。记,以及则可得如下结论。
若有向图g中存在一个有向生成树,那么矩阵H就是可逆的,定义,,且均为正定矩阵。若有向图中各节点间构成的是无向图,则也为正定矩阵。
2.2 风电场相关参数
风能利用系数是关于叶尖速比、桨距角的二元函数,如式2.1、2.2所示。
(2.1)
(2.2)
ω为风轮角速度;R为风轮半径;v为风轮风速。
由式2.1知当风速变化时,只要相应的改变风轮角度,就能使叶尖速比保持不变,Cp—λ是风电机组的特性曲线,不同桨叶的风电机对应的Cp—λ曲线不同,如图2.2所示,其表示agent在不同叶尖速比下的风能捕获力不同。
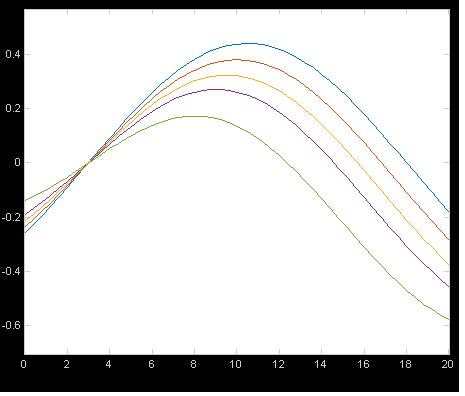
图2.2 曲线
由空气动力学知,风机机组从风中获取的能量如式2.3所示。
(2.3)
其中为空气密度,A为风轮扫过面积。
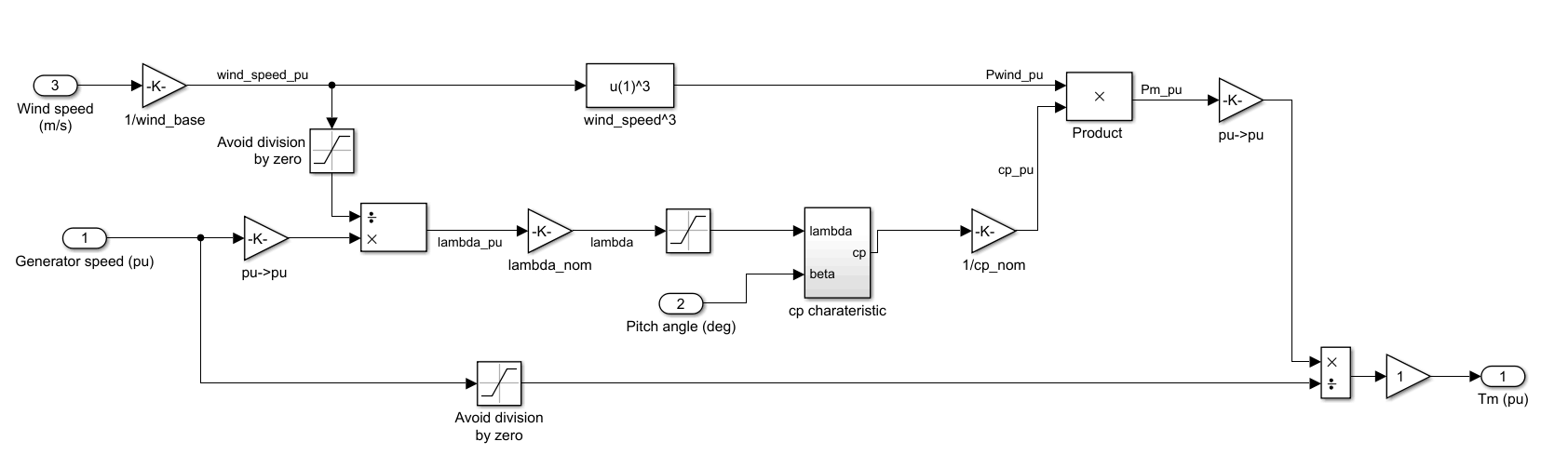
当风速小于额定风速时,桨距角接近0°,agent的输入会随着风速的增大而增大,在此条件下为了得到最大的输出,即得到最大的风能利用系数。根据式2.1、2.2知,为了得到最佳风能利用系数,就需要得到最佳叶尖速比;要得到最佳叶尖速比,就需要得到最佳风轮角速度;而风轮角速度可通过控制发电机的电磁转矩来实现。图2.3为风力发电机组的能量转化示意图,其详细转换方式如式2.4、2.5所示。
(2.4)
(2.5)
ωzj为风轮最佳转角速度,λZJ为最佳叶尖速比;Cp(zj)为最佳风能利用系数;ωg(zj)为发电机最佳转角速度;N为齿轮箱变速比;Tg为发电机转矩;Kzj为最优模态增益。由式2.5知,为了使风机运行在最佳转角速度,需要将发电机转矩按照转速的二次方进行设置,即可使风电机组运行在最优Cp曲线上。
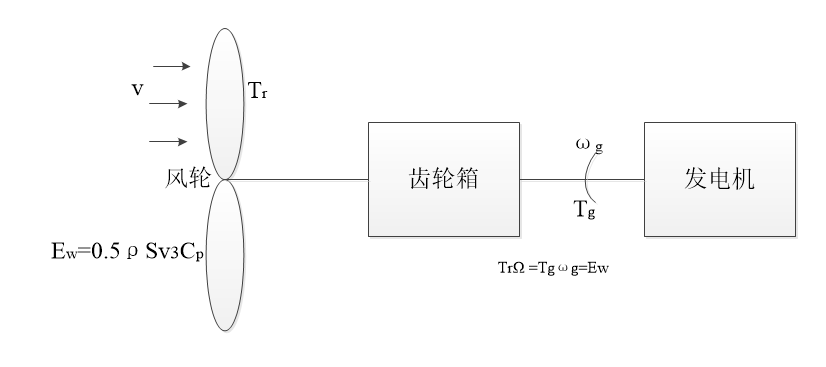
图2.3 风力发电机组能量转换系统
2.3 本章小结
本章介绍了论文中将会用到的一些基本理论,第一小节介绍了图论,图论的基本组成:有向图、无向图、拓扑图等,图论是多智能体系统的基础;第二小节介绍了风电机的相关参数,包括最佳风能利用系数的计算、叶尖速比的定义、风电机组的能量转换原理等。
第3章 单agent的优化控制
Agent即风力机是一个由多部件组成的机电一体化系统,其主要部件包括叶轮、传动链、发电机、塔架、控制系统等。图3.1是变速变桨风力机主要部件关系图[11]。
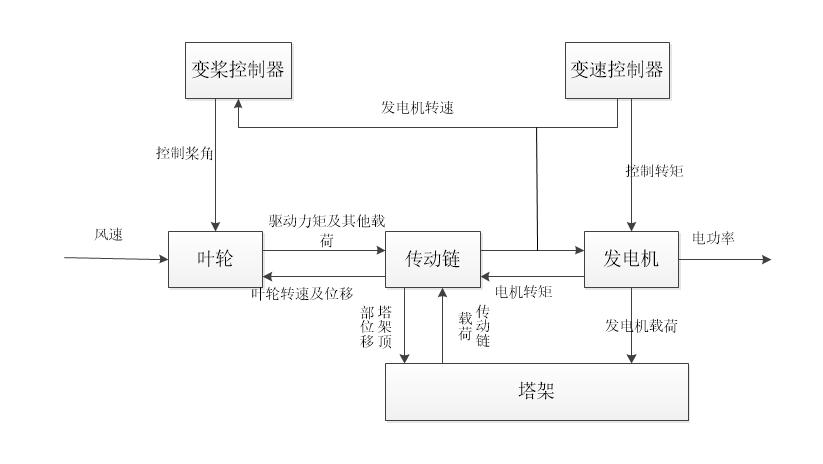
图3.1 变桨变速风力机主要部件关系图
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


