论文总字数:22182字
摘 要
外骨骼机器人是一种将人的智能和机械的动力相结合的人机一体化可穿戴设备。在现阶段,外骨骼机器人在军事与医疗领域得到了越来越多的应用。但现今研发的外骨骼机器人多为刚性外骨骼机器人,虽然技术比较成熟,但其自重大、柔顺性不佳等固有缺点难以得到有效解决。
本次课题研究基于下肢柔性外骨骼机器人的设计,该类机器人通过人体自身的骨骼传递负载,选择与人体肌肉输出特性相似的气动肌肉作为该系统的驱动器,当人体负重行走时气动肌肉会代替关节附近肌肉群的部分功能,从而缓解肌肉的疲劳程度,降低人体的新陈代谢量。本文通过对人体运动生物力学的分析,确定人在平地行走时外骨骼机器人中气动肌肉的助力自由度,获取髋、膝、踝三个关节在一个步态周期内转动角度和所受力矩的变化情况,同时根据气动肌肉的工作特性,确定了各组气动肌肉固定点的分布位置。随后设计了大腿与小腿处的柔性固定器用于连接各组气动肌肉,该固定器主要由凯夫拉线承受各组气动肌肉产生的拉力,用EVA热熔胶来固定凯夫拉线的分布位置,采用尼龙搭扣用于调节固定器的尺寸,并辅以气囊用于固定器与人体下肢的连接。最后设计并搭建了由气动系统和控制系统组成的实验平台,用于控制膝关节前后两组气动肌肉的充放气过程,以验证系统设计的合理性与有效性。
关键词:柔性外骨骼;气动肌肉;柔性固定器;凯夫拉线
Human exoskeleton system design combining with 3D printing
School Num: 02011514 Name: HE Chongwei
Supervised by WANG Xingsong
Abstract
Exoskeleton robot is a humachine wearable device that combines human’s intelligence with mechanical power.Nowadays,the exoskeleton robots have been more and more applied in the military and medical fields.Most exoskeleton robots developed now are rigid systems,although the technology is relatively mature, the inherent shortcomings such as poor softness are difficult to effectively overcome.
This project is aimed at the development of a soft lower extremity exosuit.This exosuit can transfer the load to the ground through the body’s own bones,using pneumatic muscle which is similar to human muscle in output characteristics as a driver of the system.The pneumatic muscles will substitute some functions of human muscles around the joints when human carry the load.It can relieve muscle fatigue and reduce the metabolic cost.Based on the analysis of human lower limb’s biomechanics,this article determine the assisted POF of the pneumatic muscles when human walk. According to the operating characteristics of pneumatic muscle and three joints’ rotation angle and moment changes in a gait cycle, the distribution of pneumatic muscles’ adapting pieces can be determined. Then the flexible fixators lie in thigh and calf is designed for connection of each group of pneumatic muscles.The Kevlar lines bear pulling force produced by each group of pneumatic muscles, with the EVA hot glue to maintain the positions of Kevlar lines. Velcro is used for adjusting the size of the fixators and gasbag is used for connecting fixator and lower limbs. Finally, in order to verify the rationality and effectiveness of the system design, the experimental platform consisting of a pneumatic system and a control system for controlling two pneumatic muscles around the knee joint was designed and built.
Key words: Soft exosuit; Penumatic muscle; Soft fixator; Kevlar
目 录
摘 要 I
Abstract II
目 录 III
第一章 绪论 1
1.1 选题背景和意义 1
1.2 下肢助力外骨骼研究现状 1
1.2.1 国外的研究现状 1
1.2.2 国内的研究现状 4
1.3 存在的关键问题 4
1.4 主要研究内容 5
第二章 下肢运动机理分析 6
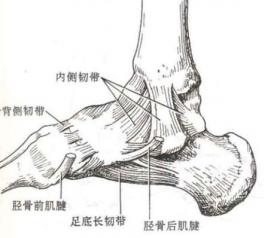
2.1 人体下肢解剖结构 6
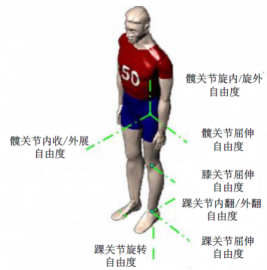
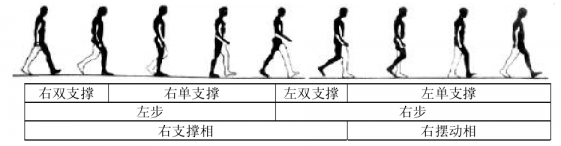
2.2 人体行走系统分析 7
第三章 外表骨骼系统整体设计 10
3.1 外骨骼结构的选择 10
3.2 驱动器的选择 10
3.3 固定器的布置 11
第四章 气动肌肉的布置 12
4.1 气动肌肉工作原理 12
4.2 气动肌肉的布置 12
4.2.1 髋关节处气动肌肉布置 14
4.2.2 膝关节处气动肌肉布置 15
4.2.3 踝关节处气动肌肉布置 16
第五章 固定器的设计 18
5.1 固定器的应力分析 18
5.2 固定器总体设计 19
5.3 环形气囊的布置 19
5.4 柔性板的设计与制作 20
第六章 气动与控制系统的设计 24
6.1 气动系统的设计 24
6.2 控制系统的设计 24
第七章 总结与展望 26
7.1 总结 26
7.2 展望 26
致 谢 27
参考文献 28
绪论
选题背景和意义
一直以来,机器人技术的研究是机械行业中兴盛不衰的话题。近几年,随着控制理论的不断完善、新型材料的不断涌现,仿人型机器人的研制与开发逐渐成为机器人领域研究的一个热门方向。通过对人体生物力学等领域的研究,将其理论运用于机器人的设计与控制中,制造出了许多功能各异的仿人型机器人,它们被运用于行业的各个方面,帮助人们完成许多以前难以完成的工作,极大地解放了劳动生产力。
但是,随着研究的深入,研究者也遇到了许多难题,如仿人型机器人不具备人类的灵活性、难以对周围变化的环境做出快速而准确的响应等,这使得该类机器人在某些场合的发展受到限制。在这种情况下,人们就希望将仿人型机器人与人类各自的优点相结合,在执行预定目标时,机器人提供助力,人类提供操控,从而进一步扩大机器人的应用范围。基于这种需求,研究者研制出了能将两者优点相结合的机械装置,被称为外骨骼机器人。
外骨骼机器人是一种将人的智能和机械的动力相结合的人机一体化可穿戴设备。在现阶段,外骨骼机器人在军事与医疗领域得到了较为广泛的应用。
当今,各国均对军事力量的发展投入了巨大的精力,研发出了各种先进装备,极大地保障了士兵的生命安全,提高了其应对各种恶劣环境的能力。但是,如此多的设备若仅由士兵单独背负,会对他们的体能造成极大挑战。因此,在携带所需装备的同时,应尽量减少士兵体能的消耗,该目标成为了提高单兵作战能力的一个重要研究方向。而外骨骼机器人能通过自身携带的能源为士兵提供额外的助力,帮助他们在背负重物时减少自身的新陈代谢量,提高行军的速度,甚至可以独自完成以前需要多人协助完成的任务,从而大幅度地提高了他们的作战能力。目前,各国均在积极发展外骨骼装备,从而争取军事技术的制高点。
除了在军用领域发挥重要作用外,外骨骼机器人在医疗领域也占据了一席之地,使用场景最多的是帮助患者进行康复治疗。外骨骼机器人能带动暂时丧失部分活动能力的肢体做相应的生理运动,促进其更快地恢复。甚至有些外骨骼机器人能取代部分肢体的生理功能,让这些人群像普通人一样生活,使他们更好地融入到社会中。
在今后,随着外骨骼机器人研究技术的逐渐成熟,其巨大的商用价值也将得到体现。在外骨骼机器人的帮助下,节假日去登山远足不会累得气喘吁吁,需要挪动家中的重物时也不必因找不到帮手而束手无策了……总之,它将渗入到我们平常生活的方方面面。
下肢助力外骨骼研究现状
国外的研究现状
国外较早开始了对外骨骼机器人的研制,许多国家都投入了巨大的精力进行相关领域的工作。在现阶段,以美国和日本的研究成果较为显著。
1960年,美国通用电气公司首先开展了助力型外骨骼机器人的研究,该外骨骼机器人被称为Hardiman,如图1‑1所示。Hardiman拥有30个动力关节[1],由液压与电机驱动。穿戴者通过操纵外骨骼的内侧,使之跟随穿戴者做出相应的动作[2]。该外骨骼装备能将穿戴者的力量放大25倍,但由于其体积巨大,十分笨重,而且稳定性差,因此几乎无实用性。但是,它的诞生开创了研究外骨骼机器人的先河,在当时所提出的一些新技术为后来的研制提供了指导。

图1‑1美国通用电气公司研制的Hardiman
1978年,美国麻省理工学院也研制了一套外骨骼设备,该设备采用弹簧储能和变阻尼关节驱动,能将80%的负重传递到地面,使穿戴者在负重36kg的条件下保持1m/s的速度行走[3, 4]。
在20世纪90年代,随着新技术的不断涌现,外骨骼技术得到了较大的进展。
2000年,美国国防部高级研究项目局致力于研制一套用于提高士兵作战能力的外骨骼装备,该设备能增强士兵的防护作用,使之能负重400磅(约181千克),大大提高士兵的行军能力。该项目局将此项目分派给了加州大学伯克利分校的人体工程实验室(HEL)、SARCOS机器人公司、橡树岭国家实验室(ORNL)以及Millennium Jet公司[5-7]。
2004年,加州大学伯克利分校研制出了名为BLEEX的下肢助力外骨骼机器人,如图1‑2所示。该外骨骼机器人主要由一个支架和两条仿生金属腿组成,支架上可放置背包,其内容纳了驱动和控制该机器人的相应设备,剩余空间可用于放置各种军用设备[8]。BLEEX的每条腿有7个自由度(髋关节处3个,膝关节处1个,踝关节处3个),由移动电源提供能源,驱动液压传动系统产生助力。该外骨骼机器人可适应多种地形的步行,包括崎岖山路、陡坡等。研究表明,BLEEX能承载75kg的负载,并以0.9m/s的速度行走,在没有负重的情况下,能以1.3m/s的速度行走[9]。

图1‑2加州大学伯克利分校研制的BLEEX
随后,伯克利分校对BLEEX进行优化处理,研制了ExoHiker和ExoClimber。ExoHiker对背负重物情况下的持续行走能力进行了优化,减小了能耗,同时增加了太阳能板用于能源的持续供给。而ExoClimber在上述基础上对快速行走进行了优化,使穿戴者的灵活性大大提高[6]。
2009年,在ExoHiker和ExoClimber的现有基础上,洛克希德·马丁公司开发了名为HULC的外骨骼机器人,如图1‑3所示。该外骨骼机器人进一步提高了士兵在野外环境中的适应能力。在外骨骼机器人的造型得以精简的同时,其负重能力提高到了90kg,而且能完成除步行外的其他运动,如下蹲起立等动作。由于其简洁的造型,仅需30s左右就能脱下,提高了士兵的作战效率。

图1‑3洛克希德·马丁公司研制的HULC
2008年,一款名为XOS-1的外骨骼机器人在美国萨克斯公司诞生。该机器人使用电池作为动力源,能对穿戴者的动作快速响应,并且力量大,能将200磅的物体连续举50——500次。但其续航能力弱,每次只能使用40分钟[5]。
继XOS-1研制之后,雷神公司对其不断改进,于2010年推出了名为XOS-2的外骨骼机器人,如图1‑4所示。该机器人采用液压驱动,在提高力量的同时降低了其能耗——将耗电量降低了50%。除此之外,该机器人还能配合完成较复杂的动作,如踢足球、爬楼梯等[10]。

剩余内容已隐藏,请支付后下载全文,论文总字数:22182字
相关图片展示: