论文总字数:23776字
摘 要
关键字:柔性关节,力矩控制,测量。
The Design of Flexible Mechanical Joint
02011313 Meng Lingxi
Supervised by Luo Xiang
Abstract:This article focuses on flexible mechanical robot joints in the current research to develop prospects, indicating working principle of a flexible machine arm . Industrial robots in industrial production plays an increasingly important role. In the most widely used industrial articulated robot composed of a plurality of rotary joints. But in the actual production of many industrial robot joints are rigid joints, when the off arm will be relatively large vibration and noise during rotation, and start and stop at various stations due to the instantaneous acceleration from zero speed to a speed V. Since the impact of acceleration over the General Assembly and for the whole system work precision mechanical arm will have a huge impact. The main task of this project is to design a flexible mechanical joint, the joint torque measurement can be achieved to realize the joint during rotation torque values for real-time monitoring, and by adding part of the whole process of damping velocity curve tends gently reduce the impact on the joints. By Solidworks three-dimensional modeling of the system design of its structure. SimMechanics in Matlab to model the system set up for motion simulation system to analyze its motion characteristics.
Key words: flexible joint,torque control,torque measure.
1、绪论
1.1、机械臂研究背景以及发展
机械臂是一种可以模拟人的手臂的机械结构。可以代替人们进行多次反复的抓取移动的劳动。将人们从繁重的劳动中解放出来,实现工业生产的自动化。并且可以在恶劣的环境下工作,改善工人们的工作环境保障了工人的安全。因此现如今机械臂被广泛运用到工业生产的各个方面。
上世纪40年代,美国核能方面上首次运用机械臂代替人来进行搬运核辐射材料,而工人们只需要操作这些设备来完成各种工作。随后,机械臂遍被各个许多行业广泛应用,在污染严重或者对人体有较强危害的环境工作。也在自动生产线以及数控加工中心中应用广泛,完成材料的搬运以及刀具的自动换装。
1.2、国内外现状
目前在工业机器人方面,欧洲和日本处于世界的领先地位。以德国日本代表的工业强国,其国内已经将技术水平十分成熟的工业机器人作为一种工业生产的标准设备,使其国内自动化生产水平有了极大地提高。这些老牌的工业强国在工业机器人的都有着很强的技术实力,在世界机器人领域占有者一席之地。许多公司在机器人手臂上面成就都很高。
然而我国的机器人的技术起步比较晚,而且发展缓慢。随着科学工作者的努力也取得了许多成就。90年代后,我国大力重视发展机器人产业,成立了许多专业的研究机构。哈工大、上海交大中科院等高校在工业机器人方面都做出了很大的努力。
1.3、存在的问题以及解决办法
有些机械臂关节处采用的刚性连接,而且关节转动的时候由于没有控制力矩,机械臂在转动过程中会有比较大的震动和噪声,并且在各个工位启动和停止时由于速度从零瞬时加速到一个速度V导致加速度过大。由于加速度过大会对整个系统造成冲击并且对于机械手臂的工作精度也会产生很大的影响。
所以柔性机械关节就被人们提出来。主要方案是在在整个系统上添加阻尼环节,减缓由于加速度过大所带来的冲击以及提高机械臂控制的精度。
1.4、柔性关节的背景与研究意义
机器人关节是机器人的重要组成部分。机器人关节的特性决定了整个机器人的特性。随着许多方面的电子技术的发展(例如伺服技术)机器人关节也不断在发展。机械关节逐渐向大力矩、高精度、高灵敏度、小型化等方向发展。
工业机器人在工业生产上发挥着日益重要的作用。在工业上应用最多的是关节机器人有多个旋转关节组成。但是在实际生产中有许多工业机器人的关节是刚性关节,在关节转动的时候由于没有控制力矩以及关节各处都是刚性联接的原因,机械臂在转动过程中会有比较大的震动和噪声,并且在各个工位启动和停止时由于速度从零瞬时加速到一个速度V。由于加速度过大会对整个系统造成冲击并且对于机械手臂的工作精度也会产生很大的影响。
柔性关节就是用一种可以控制力矩以及添加了阻尼的机械臂关节。通过编码器采集期望加速度与实测加速度作为信号进行处理,从而控制力矩。并且通过阻尼器,是速度曲线变得平缓,减少冲击。
本次课题的目的是:设计一种柔性机器人关节实验系统,对机器人关节进行柔性设计,并且实现对力矩的控制,并且通过调整系统的阻尼来减小整个系统的震荡,通而实现机器人关节的柔性化设计。
1.5、本章小结
本章主要介绍机械臂的研究现状与发展历史,以及国内外的情况。举出一些机械臂关节存在的问题。
- 编码器的介绍
2.1、编码器的总体简介
编码器是一种可以把数据或者信号进行转化和处理以便于信号传输以及信号分析的仪器。码盘或码尺是编码器的重要组件,位移型编码器中的码尺可以讲位移信号转换为电信号,旋转编码器中的码盘可以将角位移转化为电信号。编码器从读写方式来分类可以分为两种
按读写方式的分类:可以分为接触式编码器和非接触式编码器。按工作原理分类:可以分为增量式编码器和绝对值式编码器。增量式编码器输入位移信号然后将位移信号转转化为一定周期的电信号,然后将电信号转化为记数脉冲,通过记录脉冲的个数来计算角位移或者直线位移的大小。绝对值编码器每一个相位对应一个特定的数值,编码器输出的值只与最终位置有关,与过程无关。
2.2、编码器的分类方式。
按照码盘的刻孔方式(1)增量型:编码器旋转一定的角度编码器就会发出一定量的脉冲,有些编码器发射较高的脉冲,需要对正余弦信号号进行细分,斩波出更高频率的脉冲信号。(也有发正余弦信号,然后对其进行细分,斩波出频率更高的脉冲),增量性编码器一般会有3个输出通道,A向、B向和Z向,并且A、B两向通常相位为相差90°,根据A通道与B通道的的相位延迟可以区分编码器的正传或反转。可以选取A向信号和B向信号的上升沿或者下降沿对输出信号进行变频(2倍或者4倍的频率);Z相为单圈脉冲,编码器每转一圈发射一次脉冲,进行一次记数。(2)绝对值型:在编码器旋转的过程,每个位置对应一个唯一并且确定的二进制数值。
按信号的输出类型分为:长线驱动输出编码器、电压输出编码器、集电极开路输出编码器以及推拉互补输出编码器。
按编码器的安装方式分类
有轴型:通过轴进行连接的编码器,有轴型编码器又可分为夹紧法兰型、同步法兰型和伺服安装型。
轴套型:轴套型编码器通过轴套进行连接,轴套型编码器一般安装在轴上。轴套型又可分为为三种,有半空型编码器、全空型编码器和大口径型编码器等。
以编码器工作原理可分为:光电式编码器、磁电式编码器和触点电刷式编码器
2.3、编码器的工作原理
编码器的工作核心是光电码盘。光电码盘安装在编码器的中心,光电码盘上有环形的通暗刻线,通过光电发射器和光电接收器读取信号,获得四组相位相差90度的正弦信号(信号的周期为360度),如果把C、D的通路反接,叠加在A、B通道上,可以加强信号的强度,每转一圈Z通道会输出一个Z相脉冲来代表零位参考。因为A、B通道的波形相位相差90度,所以可以通过对比A、B通道波形初相的位置来判定编码器的转向正反转,可以根据脉冲的零位位置。得出其零位的参考位置。码盘是编码器的重要部分,码盘的材料有玻璃,金属。塑料三种。玻璃材料的码盘在玻璃上的刻线很浅,但是它的热稳定性比较好,精度较高。金属码盘的刻线方式,是在码盘上做出通与不通的刻线,金属码盘的强度比较高,不易碎,然为金属码盘的厚度导致其精度受限,它的热稳定性也比较差,要比玻璃码盘低一个数量级。而塑料码盘比较经济,但是各种性能比上面两种都要差。分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。
3、总体方案
3.1、设计任务
设计可用于两足步行机构中力矩控制场合的驱动器及其控制特性研究。设计要求:
- 设计适用于大惯性、低速负载的液压驱动器的辅助机构。主要是使驱动器具备力矩测量和旋转阻尼的功能;
(2)设计相应的控制方法,可以实现低耗控制,运动轨迹自然(与期望运动轨迹相比具有较高阶的逼近度,能量角度正负功比高);
(3)设计控制电路,控制力矩。
(4)利用Matlab中的SimMechanics组件对系统进行仿真。
3.2、总体方案
本课题所设计的关节需要进行力矩的反馈控制以及力矩的测量。因而选用编码器以及扭矩弹簧来实现。两个编码器一个安装在电机尾部,另一个安装在扭矩弹簧的之后。在电机工作时通过扭矩弹簧传递力矩,从而弹簧两端会有一个角度差。如知道弹簧的弹性系数,再测得角度差,两者相乘便可以求得电机的力矩而弹簧的弹性系数易知(直接表明或者通过实验测得),下面的关键就是测得角度差,由于编码器会输出一串脉冲,比较两个波形的相位差即可得知角度差,从而测出力矩。再将信号反馈给控制器在作出相应的反应,达到反馈调节的作用。
3.3、方案的提出
在本次课题中,我主要负责关节的柔性设计。现在主要有两个方案可供选择。
3.3.1、方案一
为了简要说明方案的大体情况,对柔性关节进行了三维建模。
下图为方案整体结构图:
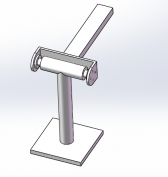
图1、方案设计简图
下图为柔性关节详细的三维图:
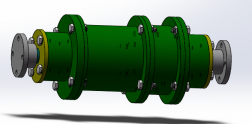
图2、方案1柔性关节三维图
现在通过如下一幅透视图来说明关节内的结构:
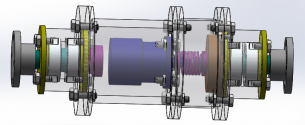
图2、方案1柔性关节内部结构三维图
从外形来看整个关节外侧有四个缸体组成缸体组成,之间通过螺栓连接。现将缸体从左至右依次编号为缸体1、2、3、4。把四个缸体看做一个整体,缸体固定在机架上,所以几个缸体可以看成固定的机架。谐波减速电机(三维模型蓝色的部分)与缸体2上的四个螺纹孔通过螺栓螺母连接。
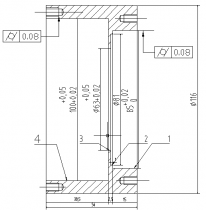
缸体4中的轴为输出轴1,下图为输出轴1的三维图最右端可与电机轴通过弹簧联轴器进行连接,截面为D型(如果实物电机力矩过大可以改为键连接)。截面为矩形的轴段用于固定阻尼器的轴向位置(许多扭矩阻尼器的通孔为矩形)。轴上的轴肩用于定位轴承的轴向位置,用端盖固定两轴承的位置。轴的外侧与法兰零件通过键连接固定,用于联接机械臂的一端。如下图:
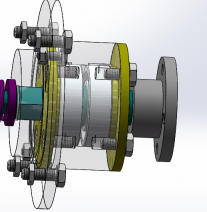
图2、缸体4内部结构三维图
缸体4与缸体2之间通过缸体3通过螺栓螺母相互联接。所以输出轴1与电机轴的相对位置已经国定,电机轴与输出轴1之间通过一个扭矩弹簧联轴器传递转矩。扭矩弹簧联轴器既起到了联轴器联接电机轴与输出轴的作用也起到了关节的柔性化作用,通过编码器测出弹簧两端之间的旋转角度差即可求出电机力矩,再通过加装的阻尼器减少系统的震动达到柔性化的设计。
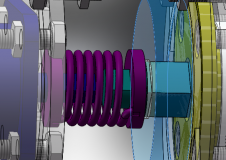
图3、缸体2内部结构三维图
缸体1中的结构与缸体与缸体4结构相似
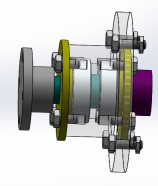
图4、缸体1内部结构三维图
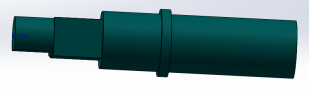
图5、输出轴三维图
轴的右端有一D型孔为了配合编码器。编码器与端盖固定。由于许多电机自带编码器或者可以安装在电机的底端所以图中没有表示出来,要买到电机实物才能决定具体方案。机械臂通过法兰件与驱动系统联接。
在于导师在讨论方案的可行性时,老师与我讨论了方案的可行性。结构紧凑,以及有效的减少轴的弯矩。但是也发现了很多缺点,不能360度旋转,在调试的过程中会有问题,而且如果所选电机尺寸过大会导致机械臂尺寸过大,是整体质量过大不易控制。于是提出了第二个方案。
3.3.2、方案二
方案二使用悬臂梁的方案进行安装。如右图。下图为柔性关节的三维图:方案二和方案一采用了不同的设计思路,不在是输出轴带动机械臂旋转而是电机的输出轴通过弹簧与阻尼缸连接实现力矩的传递,通过缸体转动而叶片固定来实现在系统中添加阻尼将弹簧与阻尼器结合,将尺寸有效的缩减。只需要在端部装1个编码器就可以测出弹簧的扭转角,对于控制来说更加的方便。
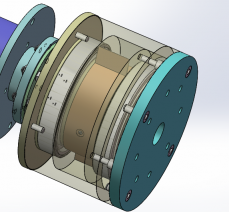
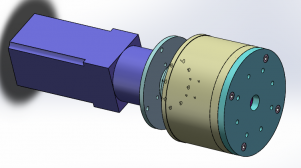
图 6、方案二柔性关节三维图
现在通过如下一幅剖面图来说明关节内的结构:
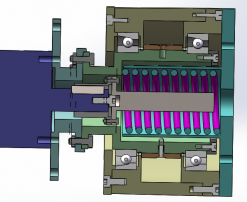
图 7、方案二柔性关节剖面图
电机通机架连接零件与空心轴相连通过螺栓螺母进行紧固,空心轴上安装叶片,通过内六角紧定螺钉进行定位。阻尼缸通过轴承与空心轴进行配合两端用端盖进行轴向定位。套筒通过螺钉与阻尼缸的缸体连接。
电机的输出轴通过键与法兰连接,法兰与法兰轴连接。法兰轴与套筒通过中心臂扭矩弹簧连接传递力矩。
3.3、方案的分析与选择
方案一:由于机械臂安装在两个法兰上所以受力比较均匀,并且力大部分都加在缸体上,结构的力学性能较好。但是体积较大不易安装。
方案二:结构紧凑,便于安装。由于编码器安装在套筒上测出的角度是电机轴相对于套筒的转角,即弹簧的扭转角,方便控制。
经过与导师和同组同学之间的讨论决定采用方案二。
- 机械结构的设计
4.1、大臂关节的设计
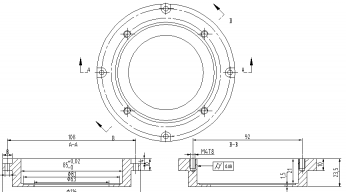
下图为大臂关节的装配图
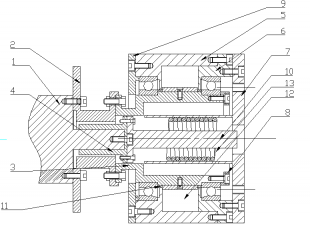
- 电机 2、机架连接零件 3、空心轴 4、法兰 5、阻尼缸 6、阻尼缸端盖 7、套筒 8、端盖1 9、端盖2 10、法兰轴 11、轴套 12、叶片 13、中心臂扭矩弹簧
图 9、大臂关节的装配图
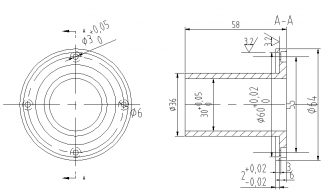
4.1.1、机架连接零件的设计
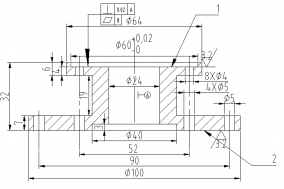
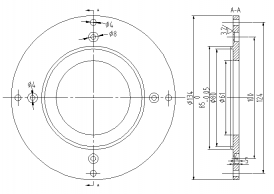
图 9、机架连接零件图
零件的整体尺寸见图(9)(面1与空心轴配合,面2与机架电机配合).总体的设计思路是空心轴与机架以及电机固定起来,但是机架上并没有足够的空间去装配这三个零件,所以要加入机架连接零件将空心轴机架电机连接起来。
所以要打出三组孔。电机的法兰定位孔圆直径为52,四个定位孔直径为3,所以要在零件的面2上打4个螺栓孔用来配合螺栓。而为了装配以及加工方便将面1上与空心轴配合的八个个螺栓孔圆直径也定位52,孔径定为4。与机架配合的四个孔圆直径定为90,孔径定位5。
为了装配时给螺栓留出空间所以零件留出一段直径较小的轴段,尺寸定位19(所用螺栓长度都小于15)。
由于减速器的定位凸台的直径为40,高度为3,所以要在面2上打出直径为40深度为3的孔为减速器的定位凸台留有足够的空间。由于电机的轴和法兰需要在机架连接零件中配合,为了给法兰留出空间所以要在零件的截面中心打24的孔。
由于空心轴要固定在机架连接零件上,主要零件又都装配到空心轴上,所以要保证同心度。故要对空心轴进行定位保证其轴心与机架连接零件的轴心一直。所面1要凹下一些来定位空心轴。由于要进行定位,面1的粗糙度以及形位公差的要求比较高,查阅机械手册可知粗糙度定位3.2平面度定为8较合适。而且若要保证面1与机架连接零件的轴心的垂直,所以面1相对于轴心还有垂直度的要求,查阅机械手册可知平面度定为0.02较合适。由于面1与空心轴的配合,若面1的直径过大则起不到定位作用,过小则装配上会出现问题,并面1的直径极限尺寸还有要求,查阅机械手册取上偏差为 0.02、下偏差为0。面2也要与机架配合所以粗糙度要求为3。
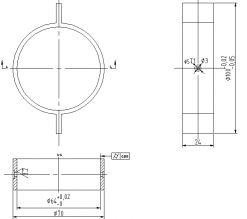
4.1.2、空心轴的设计
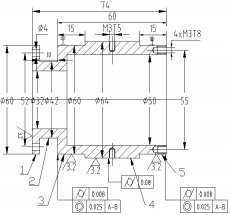
图 9、空心轴零件图
空心轴零件的整体尺寸见图(9),将轴段标号为1、2、3、4、5进行说明。由于轴承已经选定(角接触球轴承71912AC),内径d为60,外径D为85,高度B为13。轴段3、5与轴承配合,将轴段3、5的轴径设为60,轴段的长度设为15。
剩余内容已隐藏,请支付后下载全文,论文总字数:23776字
相关图片展示: