论文总字数:34228字
摘 要
近年来随着分布式驱动电动汽车的快速发展,自主轨迹跟踪已经成为各大汽车生产厂商和车辆研究机构对未来汽车功能实现研究的热点领域。鲁棒控制法、模型预估法、模糊神经网络控制法等都是目前研究学者们常采用的解决车辆轨迹跟踪问题的方法。
本文车辆轨迹跟踪研究采用的是鲁棒控制(Robust Control)方法。鲁棒控制是现代控制理论中不可或缺的理论知识,近20年在国际自动控制领域一直都是研究热点。鲁棒控制的优点是能够保证系统的动态特性在一定范围内波动时仍具有较好的控制性能。本文以自主车辆轨迹跟踪为应用背景,在了解鲁棒控制原理和控制器设计原理的前提下,建立汽车轨迹跟踪动力学模型,考虑侧偏刚度的不确定性,在假设车辆纵向速度为常数的条件下,研究轨迹跟踪控制器的控制策略,确定前轮转角为控制输入,利用Matlab/Simlink及Carsim等软件对车辆跟踪既定轨迹的状态反馈鲁棒控制器和输出反馈鲁棒控制器进行建模和仿真,最后对不同的控制策略和仿真结果进行分析,校验两种控制器的控制性能。
关键词:自主车辆;轨迹跟踪;鲁棒控制;状态反馈;输出反馈
The Research on Trajectory Tracking Control of In-wheel Motor Electric Vehicles
02011531 Cao Mingcong
Supervised by Wang Rongrong
Abstract:
In recent years, with the rapid development of autonomous vehicles, the trajectory tracking has become a research hotspot of the major automobile manufacturers and research institutions for the future automobile vehicle functions realization. Robust Contol Method, Model Predictive Control, Fuzzy Neuron Network Control and other theories are the most popular control methods to deal with path following problems.
Robust Control Method is adopted in this dissertation. It’s an indispensable part of modern control theory, and has become a research hotpoint in the field of international automatic control for nearly 20 years. Robust Control can be used to keep system stable whthin a certain band. Based on the application background of trajectory tracking, in understanding the premise of robust control theory and design principle of the controller, our research targets are to establish a dynamic model of vehicle trajectory tracking, to consider the uncertainty of cornering stiffness in the condition of the constant longitudinal velocity. It’s necessary to understand the control strategies of path following controllers, to make the front-wheel steering angle as the control input, to model and simulate the state feedback controller and the output feedback controller by using Matlab/Similink and Carsim and to analyse different control strategies and simulation results.
KEYWORDS: autonomous vehicle; trajectory tracking; robust control; state feedback; output feedback
目 录
第一章 绪论 1
1.1 选题背景及研究的目的和意义 1
1.1.1 分布式驱动电动汽车的研究优势 1
1.1.2 轨迹跟踪研究的背景和意义 1
1.2 国内外自主车辆循迹的发展现状 2
1.2.1 国外自主车辆循迹发展现状 2
1.2.2 国内自主车辆循迹发展现状 3
1.3 轨迹跟踪研究方向和控制方法分析 4
1.3.1 研究方向分析 4
1.3.2 控制方法分析 4
1.4 本文主要的研究内容 5
第二章 车辆数学模型的分析与搭建 6
2.1 车辆数学模型研究现状和分析 6
2.1.1车辆数学模型研究现状 6
2.1.2车辆数学模型分析 6
2.2功能实现目标和模型搭建 6
2.2.1模型的功能实现目标 6
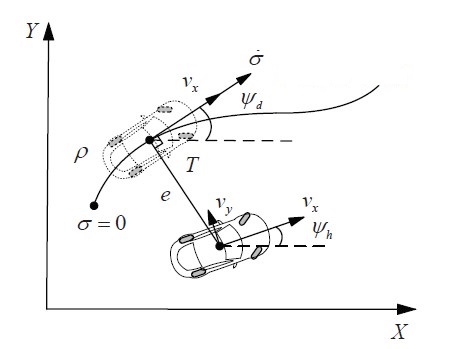
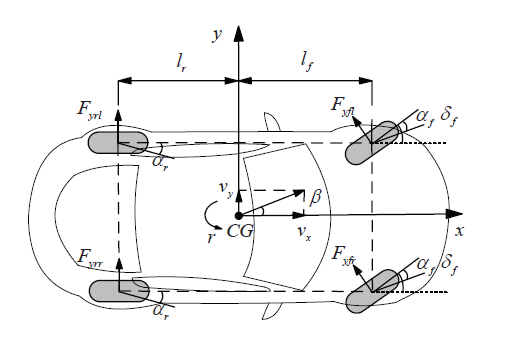
2.2.2车辆数学模型搭建 7
2.2.3期望误差范围 9
2.3本章小结 9
第三章 状态反馈鲁棒控制器设计 11
3.1 基本理论知识 11
3.2状态反馈 控制器设计 12
控制器设计 12
3.2.1模型状态空间方程 12
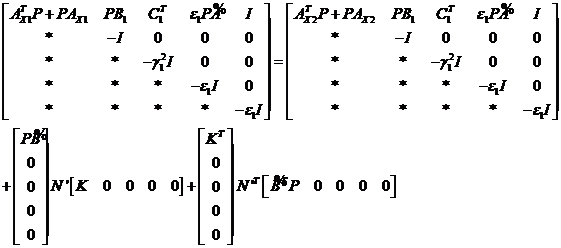
3.2.2 LMI消去不确定度 13
3.3本章小结 15
第四章 输出反馈鲁棒控制器设计 16
4.1 基本理论知识 16
4.2输出反馈控制器设计 16
4.2.1模型状态空间方程 16
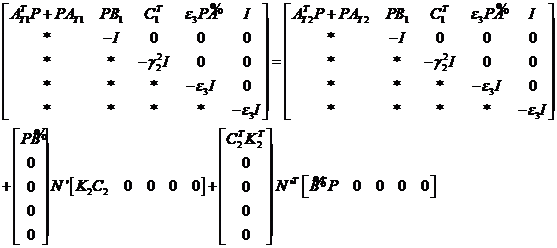
4.2.2 LMI消去不确定度 17
4.3 本章小结 19
第五章 Carsim/Simulink模型设计 20
5.1 Carsim模型设计 20
5.1.1 Carsim车体模型设计 20
5.1.2 Carsim道路模型设计 21
5.2 Simulink模型设计 22
5.2.1 Simulink与Carsim输入输出接口模型 22
5.2.2 Simulink状态变量理论设计 23
5.2.3 Simulink输入输出模型模块化设计 24
5.3本章小结 26
第六章 仿真验证结果 27
6.1 状态反馈控制仿真结果 27
6.1.1 状态反馈控制器优化过程 27
6.1.2状态反馈最优化结果 32
6.2 输出反馈控制仿真结果 32
6.2.1输出反馈控制器优化过程 32
6.2.2 输出反馈最优化结果 36
6.3 状态反馈与输出反馈最优控制对比 36
6.4 本章小结 41
第七章 课题总结及展望感谢 42
7.1 课题总结 42
7.1.1 课题内容总结 42
7.1.2 课题创新性总结 43
7.2 课题展望及个人感想 43
7.2.1 课题展望 43
7.2.2 个人感想 43
致 谢 45
参考文献 46
附录A 48
附录B 50
附录C 52
附录D 54
分布式驱动电动汽车轨迹跟踪控制研究
第一章 绪论
选题背景及研究的目的和意义
分布式驱动电动汽车的研究优势
基于分布式驱动电机的自主车辆在智能交通系统中扮演着至关重要的角色,与传统内燃机汽车相比,各车轮转矩能够在电机承受范围内按照任意比例分配[1],因此使轴荷分配更加合理。在当下科技迅速进步的背景下,具有自动化和智能化的自主车辆与传统汽车相比有着不可估量的竞争优势,代表着未来汽车行业的发展方向。在自主车辆控制系统中,最终控制输入的变量一般的前轮转角和驱动力矩,控制结构集成度较高。
总结上述智能化自动驾驶汽车的优点,结合当前国内外的研究背景,基于现有可行的实验条件,分布式驱动电动自主汽车作为轨迹跟踪的研究对象有着一定的研究优势和研究意义。
轨迹跟踪研究的背景和意义
未来汽车行业必定朝着智能化方向发展,实现轨迹跟踪是自主汽车研究任务中的重要内容之一。车辆行驶道路不确定性因素过多,行驶环境复杂,汽车自身模型的非线性,使轨迹跟踪控制成为一个非线性,复杂,时变的控制问题。这就需要采用智能控制决策,例如采用驾驶员仿真模型,使智能汽车控制系统达到预期要求,实现自主循迹的类人操作。
但是这种方法往往依赖于大量的数值计算和价格高昂的高精度电子仪器及设备,提高控制研究成本。随着现代控制理论的不断发展和丰富,控制技术不断完善,采用合理的控制手段和理论模型能够较好地简化原有车辆轨迹跟踪问题的非线性复杂度。本文亦采用合适的控制方法实现车辆轨迹跟踪的控制功能。如今自主车辆的轨迹跟踪问题依然是各个车辆研究机构的研究热点。目前,自主车辆循迹研究的主要难点在于:
- 车辆动力学系统中参数的不确定性;
- 极限条件下自主车辆的行驶稳定性;
- 在极限条件下期望轨迹的获取;
针对上述三大难点,主要采用的是现代控制方法和智能控制方法进行解决。车辆动力学系统参数的不确定性和极限条件下的行驶稳定性需要通过现代控制方法进行处理,而极限条件下的期望轨迹则需通过智能控制方法例如高精度GPS、摄像头及陀螺仪等各精密元件采集数据并通过计算机进行大量计算获取。
文献[1]对分布式驱动电动汽车的运动轨迹控制做出四种方案设计,即在2WS模型横摆角速度下分别采用了前馈加LQG反馈控制、PI控制、反馈线性化和LQG反馈控制,同时对期望横摆角速度的稳态增益进行修正。而文献[13]则使用了传统的基于模型的最优控制方法来控制车辆对预定轨迹的跟踪,即考虑了车辆轮胎的力学特性和二自由度动力学模型,并利用求解Riccati方程得到控制目标函数的系统最优反馈。
国内外自主车辆循迹的发展现状
自主汽车的研究在国内仅是刚起步,与欧美发达国家的差距急需减小,因此对电动汽车的轨迹跟踪控制研究有着较大的意义。汽车的发展是多方面的,各大汽车生产厂商在自主车辆上的投入也是巨大的,例如自动泊车系统的开发,轨迹跟踪的控制策略等。汽车轨迹跟踪问题本身是非线性、复杂及时变的控制问题,需要加入现代控制方法和智能控制策略来实现自主化。
国外自主车辆循迹发展现状
文献[2]中提出,早在1954年美国巴里特电气公司研发了第一辆自主汽车,该智能汽车系统应用于实现仓库物品自动运输的功能。自主车辆随着社会发展的需要,其应用场地也由室内转向了室外。而装备的感应系统也从电缆引导发展到现在的集视觉感应、GPS及激光雷达等先进设备为一身的感知系统。
2007年11月美国几所高校在南加利福尼亚后勤空军基地举行DARPA智能汽车城市挑战赛。比赛不仅仅是轨迹跟踪,同时智能车还需要遵守所有的交通规则,并且能够与其他汽车进行实时交流沟通,能够实现轨迹识别,路径规划和相遇避让等的功能。最终卡耐基梅隆大学的雪佛兰BOSS智能汽车获得第一名,如图 1.2.1.

图1.2.1 2007年DARPA城市挑战赛冠军——BOSS智能汽车[2]
2010年6月,由大众电子研究实验室、斯坦福大学动态设计实验室及甲骨文公司研制的无人驾驶奥迪TT coupe跑车Shelley (如图1.2.2)。文献[2]还指出了Shelley通过轮速传感器、加速计和陀螺仪等来监控汽车的性能,在没有任何人为驾驶干扰条件下,攀越位于美国西部科罗拉多州的派克峰,测试在几种极端条件下车辆驾驶稳定性。智能汽车Shelley采用激光雷达和CCD摄像机对外界环境进行感知,并通过车载高精度的GPS完成对预定路线轨迹的规划。该奥迪TTS coupe由于自身空间狭小,需要更加集成化和轻量化的自动驾驶设备,不仅实现自动驾驶功能,还提升了动力性能,使其最高车速能够达到190km/h。

图1.2.2 智能汽车Shelley[2]
在Shelley智能车攀越派克峰时,斯坦福大学做了在摩擦极限条件下的车辆自主循迹实验[3]。即利用横纵加速度构成的“g-g”图像,使车辆在加速度圆的摩擦临界上运动,后轮饱和情况下依然保持车辆行驶的稳定性。
国内自主车辆循迹发展现状
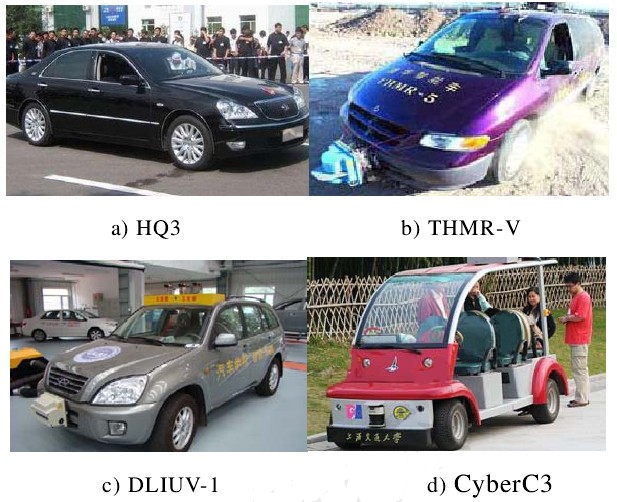
图1.2.3 国内几所高校研制的智能汽车[2]
由于我国自主汽车发展起步比欧美发达国家较晚,所以在研究成果上主要集中在我国各大高校。如图1.2.3,图a)是国防科技大学自动化研究所研制的红旗HQ3智能汽车;图b)是清华大学研发基于混合模糊逻辑的控制方法实现道路轨迹自动跟踪的THMR-V智能汽车;图c)是吉林大学自主研制的DLIUV系列智能汽车的第一代产品;图d)是上海交通大学智能汽车技术研究所研制的CyberC3智能车。
剩余内容已隐藏,请支付后下载全文,论文总字数:34228字
相关图片展示: