论文总字数:17385字
目 录
1绪论 5
1.1选题目的和意义 5
1.2国内外研究现状 5
1.3本文的主要工作 6
2无线传感网数据融合的分类 7
2.1无线传感网络概述 7
2.2数据融合的分类 9
2.2.1数据层数据融合 10
2.2.2特征层数据融合 10
2.2.3决策层数据融合 11
3无线传感网中的数据融合模型 12
3.1典型数据融合算法 12
3.1.1加权平均法 12
3.1.2神经网络法 13
3.1.3卡尔曼滤波算法 13
3.1.4贝叶斯估计算法 13
3.1.5模糊逻辑推理 13
3.1.6 D-S证据理论 14
4基于卡尔曼滤波数据融合算法及改进后的数据融合算法研究 14
4.1卡尔曼滤波算法原理介绍 15
4.2基于对估计值改正的卡尔曼算法 18
4.3门限判定的设置 19
5仿真结果与数据分析 20
6结论与展望 24
参考文献 24
致谢 26
无线传感网数据融合算法研究
赖淑娴
,China
Abstract:This paper mainly uses the wireless sensor to track the motion state of the car, and uses the Kalman filter and the improved algorithm to carry on the fusion research. Firstly, the characteristics and development status of data fusion algorithms for wireless sensor networks are introduced. Several commonly used data fusion algorithms are listed. Based on the Kalman filter algorithm, the threshold values are determined to determine the prediction error. Size, and improve the estimates to improve the accuracy of the fusion results. Through the wireless sensor, the three variables of motion speed, displacement, and acceleration of the car under uniform acceleration motion are simulated by fusion, and the error standard deviation of the original Kalman fusion algorithm and the improved algorithm is compared and analyzed. The improved algorithm is superior to the original Kalman algorithm in the accuracy of the fusion results.
Key words:Data fusion ;wireless sensor network ;Kalman filter; fusion accuracy ;motion tracking
1绪论
1.1选题目的和意义
在二十一世纪,无线传感网技术具有十分广阔的使用前景,它涵盖了诸如计算机网络、传感器技术、无线通信技术等多项现代信息技术。在如今现代化科技迅速发展的时代,大数据在人们日常工作生活中所占的比重越来越大,除了互联网产业以外,大数据在生物,医学,金融,科研,企业,工业,军事,位移跟踪,GPS定位等方面的运用也十分重要。其中,无线传感器在对运动物体进行追踪时,需要对运动物体获得实时的位置信息才可以收集到监测数据,并及时的观测物体的运动状态变化情况,最终实现对运动物体的追踪。然而,无线传感网技术或多或少都有一定缺陷,它在自身电量的存储、通信带宽以及对数据的收集和处理能力都有局限。因为无线传感器布置数量大,不能够及时补充电量,因此只能通过放置电池的方式使它工作。这就对传感器采集到的冗余、错误数据的筛选有了要求,因此需要通过数据融合的方式来降低冗余、错误数据,减少传感器对数据的转发量,进而提高传感器的使用寿命。
数据融合就是对无线传感器网络当中存在的冗余数据,错误数据以及数据误差过大等问题所采用的纠正方法之一。在如今电子信息飞速发展的时代,数据融合在各方面都有着越发深刻的影响,因此很有必要对数据融合算法的发展做进一步探究。其关键则是算法的选取。目前存在有许多数据融合算法,其中卡尔曼算法就是常用的数据融合算法之一。卡尔曼算法是一个线性性的算法,在离散、线性以及有限维的环境当中有着较为良好的使用效果。它对于运动物体的跟踪和定位、雷达探测、通信系统、导航、环境检测、气象分析、军事、金融分析等领域都有很大程度的应用。
1.2国内外研究现状
在二十世纪四十年代,信号以及噪声的统计性质被N.维纳和A.H.柯尔莫哥罗夫引入到了滤波理论当中。即设信号、噪声都是稳定的,并使用最优法进行融合。因为与传统滤波法相互关联,又叫维纳滤波。六十年代初,卡尔曼和布塞提出了一个优于维纳滤波的新算法,并且发表了《线性滤波和预测理论的新成果》,卡尔曼滤波算法就此形成。相比于维纳滤波,其优势为在线性的状态下将含噪输入信号以及观测信号进行融合处理,以求得最优融合结果。而卡尔曼滤波器是由斯坦利·施密特首次成功实现的。卡尔曼滤波法在著名飞船阿波罗的导航电脑上首次投入使用,并由此完成阿波罗登月计划。随着卡尔曼算法接下来几十年的发展当中,逐渐产生了出许多相关改良算法:扩展卡尔曼滤波算法、双重卡尔曼滤波算法、无迹卡尔曼滤波算法,多态自适应卡尔曼滤波算法等。
其他的数据融合在二十世纪七十年代初在美国就初步成型,并将它使用在军事领域,获得一定的成就。在八十年代末,一代数据融合系统开始形成规模并且逐步投入到使用中,应用的领域涵盖了从各种小型战术系统到大型海洋战略检测系统。初代数据融合重点是为军事方面服务的。在那之后,欧洲发达国家也兴起了对第二代融合系统的开发。
相比起欧美发达国家,我国在关于数据融合方面的研究起步相对较晚,于二十世纪八十年代初期才逐渐开始,直到八十年代末期相关的技术报道才开始出现,如今还处于学习和研究已有的外国先进成果的初期阶段。在近三十年来的发展中,随着数据融合技术应用越加广泛,相关部门逐渐重视,加大对科研院校和相关机构在人力,才力,物力等方面的投入,我国的无线传感网络数据融合技术的研究已经有了较为明显的阶段性成果。其中关于卡尔曼滤波融合的发展也取得了一定的成就,许多关于卡尔曼算法的相关研究在雷达、航行、卫星、航空航天、粒子滤波、铁路民航等领域均取得了一定的实际研究成果,以及高校在理论方面也取得较大进展,发表了许多相关论文。
1.3本文的主要工作
本文通过利用无线传感器对做匀加速运动小车的运动状态进行追踪监测,基于卡尔曼滤波算法对匀加速运动状态下的小车速度、位移以及加速度等测量数据进行融合处理,并通过使用门限值的方法判定其预测值误差大小,对上一时刻估计值进行修正,从而达到提升融合结果精度的目的,并对原算法与改进算法进行评估,得到改进算法优于原算法的结论。以下是本文主要的工作方面:
(1)第一章为绪论,简要介绍了无线传感网数据融合技术以及卡尔曼滤波融合算法的研究背景意义及其国内外研究现状,并说明了本文的主要工作。
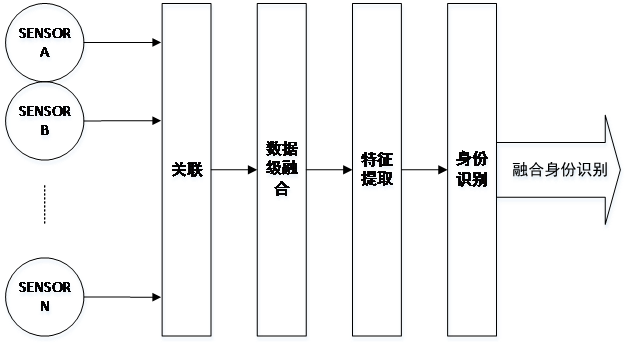
(2)第二章主要讲述无线传感网数据融合的工作原理和分类。介绍了无线传感网的体系架构及其对运动物体追踪时的工作原理,以及数据融合的三个分类:数据层融合,特征层融合,决策层融合。本文主要研究的是数据层的融合算法。
(3)第三章主要介绍了无线传感网中常用的数据融合算法:加权平均法,神经网络法,卡尔曼滤波算法,贝叶斯估计算法,模糊逻辑推理,D-S证据理论等,以及两种算法的相结合,并对比各个算法的优劣。
(4)第四章主要讲述本文所研究的主要算法:卡尔曼滤波算法,并介绍卡尔曼算法的原理及其核心公式,在基于这几个基本公式的基础上利用无线传感器对做匀加速运动的小车进行仿真,并且在基于原算法的基础上通过设定门限值判定预测值误差大小并对估计值进行修正,得出关于小车在运动速度、位移、加速度等的误差标准差,并与原算法相比较。
(5)第五章为数据分析,经过matlab仿真后,通过对比改进算法后的融合误差标准差与原卡尔曼算法的误差标准差做出比较并且对误差进行分析。
(6)第六章为展望与总结。总结全文,对卡尔曼算法的进一步改进研究做出展望。
2无线传感网数据融合的分类
2.1无线传感网络概述
无线传感网络的组成为普通节点、骨干节点、用户中心这三块。普通节点自发形成网络,并将收集到的数据发送至骨干节点,骨干节点汇集普通节点发来的数据并通过通信网络将数据传送至用户计算中心。因此,无线传感网和用户可以将骨干节点作为两者之间的接口。数据经由互联网,手机通信网络和通信卫星等,用户可以共享全世界的信息。其中,节点的组网模式需要根据无线传感网的要求来确定。在不同的情况使用与之相应的组成结构。传感网络的精度和能源损耗等深受拓扑结构选取的影响。通常无线传感网依据节点间的数据汇总结构和通信模式采用以下分类:
(1)平面结构。如图2.1所示,为平面网路组成示意图。其中节点的地位和功能相一致。其优点为网络组成简易,并且对错误信息的容纳性强。
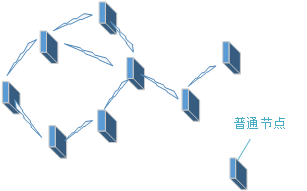
图 2.1 网络的平面式结构
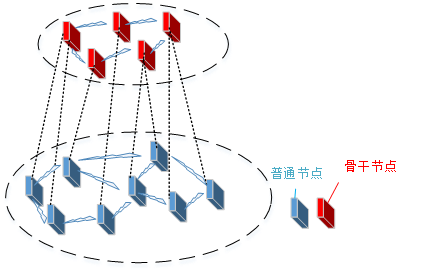
- 分级结构:如图2.2所示,网络由上层和下层构成。位于上层的骨干节点组网结构是平面式,并且能够与下层的普通节点随机通信。其优点为能够让不同规格性能的节点进行分工协作,最大程度的利用节点自有优势并且以较低的代价进行监测。
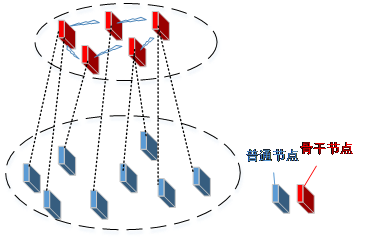
图2.2 网络的分级式结构
(3)混合结构。如图2.3所示,其结合了上述的两种组网模式,除了各层节点能够独立间通信以外,位于上层的骨干节点和下层的普通节点能够相互之间进行通信。
剩余内容已隐藏,请支付后下载全文,论文总字数:17385字
相关图片展示: