论文总字数:18329字
目 录
摘要 1
Abstract 2
一、引言 3
1.1课题研究的目的和意义 3
1.2超声测距国内外现状 3
二、方案设计与论证 3
2.1硬件功能的设计 3
2.2设计方案的论证 4
2.2.1 STM32微控制器的选型 5
2.2.2 US-100超声波传感器的选定 6
2.2.3显示屏LCD1602的选定 6
三、超声波测距的硬件参数 6
3.1 STM32单片机的工作原理 7
3.2超声波传感器的工作原理 9
3.3显示屏LCD1602的具体参数 11
3.4按键、蜂鸣器的工作原理 11
3.5存储芯片24C02的工作原理 12
四、超声波测距系统的软件设计 13
4.1软件开发环境Keil的简介 13
4.2程序流程图 13
4.3基于操作系统的任务实现 14
4.3.1 μC/OS操作系统的简介 14
4.3.2各部分程序实现的功能 15
五、测试结果与分析 19
5.1分模块调试与检测 19
5.2实验结果与分析 20
六、结论 22
参考文献 22
致谢 24
基于嵌入式系统的超声测距系统设计
桂小婷
,China)
Abstract:The ultrasonic ranging sensor has been widely used in industrial work, GPS navigation, underwater acoustic engineering and other fields because of its high performance and low price, and convenient, in this kind of gas air medium ultrasonic propagation less susceptible to interference, the energy loss is relatively slow, spread in the air of the distance is relatively far away, so when the ultrasonic distance measurement usually choose. Distance measurement has very profound significance in real life, so it is of more important practical significance to study the theory and method of ultrasonic ranging. The system contains two subsystems of hardware and software. In hardware, the hardware circuit of communication, pretreatment and other interfaces is designed by using STM32 bit microcontroller. The functions of collecting, processing and uploading the echo data are completed. Software, using C/OS embedded operating system, Keil software environment to write procedures to achieve ranging, data storage and alarm function.
Keywords: STM32;Ultrasonic sensor; embedded;alarm system
一、引言
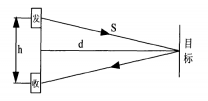
超声波测距法的定义是利用发射超声波测量已知的基准位置和目标物或障碍物之间距离。因为超声波在空气中传播的速度相对于光的速度要小很多。路程一定的情况下,超声波的传播时间更易测量,且因为超声波方向性好,定向发射好实现,强度好控制,电磁干扰几乎不受影响。因此人类利用超声波测距。这种技术在很多距离探测的实际应用中有着很重要的用途,比如移动机器人避障、流体液体液面高度测量、各种报警装置等等。
1.1课题研究的目的和意义
研究超声波测距的目的是使非接触式测量距离的方式在生活中得到更加广泛的利用。随着现代社会科技中的单片机控制技术和换能器的高速发展,非接触式距离测量技术如超声波测距已被应用于工业各个领域。众所周知,典型的非接触式测距方法有雷达测距、超声波测距、红外测距、激光测距等。目前,超声波测距是使用最多的测距原理。但是其实超声波测距的方法也存在很多局限性,尤其是在某个既定的工作环境中,需要我们深入研宄如何有目的性地提高超声波测距的准确度、缩小测量盲区范围和讨论各种影响因素等方面。本文将利用超声波测距的原理及超声波传感器在液晶显示屏上显示距离,数据存储,设定报警上下限,带报警功能。扩展报警功能在交通方面的应用。
1.2超声测距国内外现状
近年来,国内外的研究人员在超声波回波信号的处理方法、新型超声波传感器的研究、超声波发射脉冲的选取等方面进行了大量与实践相结合的理论分析[18-21],并对超声测距过程中产生误差因素提出需要温度补偿等措施。
①童峰[1]等利用最小均方自适应时延估计算法。这种方法消去了信道由于斜向入射产生的传递特性对输出信号产生的影响,消去了理想传感器与实际传感器间的频率特性差,整体系统一定带宽内的频率响应相对平坦,也使得输出均方误差最小,但是这个方法的计算量尤其是在自适应滤波阶数高的时候非常大。
②Yang Yichun[17] 等针对的缺陷是传统相关计算法在信号的采样频率很低时计算得出的相关函数分辨率低,提出了基于修正的线性调频变换和相关峰细化原理的精确时延估计快速算法,精确计算相关函数的峰,才能提高低采样信号的时延估计精度,并且不受采样率的限制。
③赵海鸣等通过双比较器整形并且结合软件确定回波前沿,消除了由于回波信号强弱不定而导致的测量时间不精确,这种方法可以提高测量的准确度,使在空气中测量的距离的精度达到厘米级[2]。
二、方案设计与论证
2.1硬件功能的设计
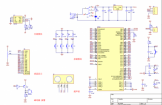
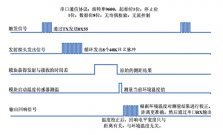
(1)单片机因其功能多,在各个领域的应用也非常广泛,比如计算机网络通信、工业农业控制、智能仪表的制作、医疗机械、汽车等。针对我们需要实现的功能,有目的性得选择单片机,对于本文基于嵌入式系统的测距功能,选择的单片机需要考虑更多方面,最重要的是功能上能否满足我的需求,当然还包括是否具有稳定性、功耗、开发的难易程度、价格是否合理等等。本系统设计采用的是STM32F103RB单片机,在系统中实现的功能是:在固定的发射时段,让超声波的发射电路发射超声波,接收时段内,不允许发射超声波;同理,在接收时间段内,控制超声波接收电路检测回波信号;根据接收电路所接收的回波信号,就可以求得超声波在空气中传播所经历的时间。
- US-100超声波传感器测距模块可测量的非接触式距离范围是2cm~4.5m,静态功耗小于2mA,宽电压输入范围是2.4~5.5V,这个传感器有一个优点就是带有温度传感器,可以对测距的数据结果进行校正,以忽略温度变化对超声波传播时间的影响,具有多种通信方式如GPIO,串口等,带有看门狗使其工作稳定高效。超声波传感器是一种可以实现物理能量之间相互转换的器件,超声波探头在发射超声波时将电能转化为声能,在接收回波信号时将声能转化为电能[14]。
- 存储芯片24C02用来存储数据,当你想要保存当前数据,摁下按键,或者记录上一组的数据,以便查看。
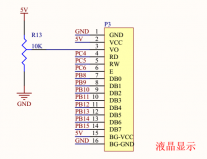
- 显示模块采用LCD1602显示屏,显示设备启动的情况和用户的交互界面,显示用户设定的报警上下限,显示当前测距数据结果和保存的数据。
- 按键模块用来控制设备的启动和复位,设定上下限的数值,蜂鸣器具有警报功能,当距离测量值超过或者小于一定的范围时,蜂鸣器就会被启动。
工作流程:单片机发射超声波并接收信号后,经过超声波传感器的处理,可以最终得到测量的距离数据,显示在显示屏上。当测量的距离值超过或者低于某一个距离范围时,会引发警报,蜂鸣器会响。并选择数据存储。系统设计框图如图2-1所示:
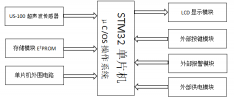
图2-1 系统设计框图
2.2设计方案的论证
利用超声波传测距方案选择的论证
方案一:激光测距的优点是精确度高、测量速度快、单色性高、亮度高、穿透能力和抗干扰能力强,尤其是在雨雾天气里。操作起来也比较简单、易上手。但是成本比较高,数据处理复杂。而且光学系统需要保持干净,否则将影响到测量,后期的维护非常不方便,所以在军事领域运用比较广泛。
方案二:红外测距的便宜、易制、相对安全。缺点是测量精度低、方向性比较差,如果反射光较弱,需要使用棱镜,增加了成本,但测的距离相对较远。
方案三:雷达测距的优点是可以恶劣的环境中短距离测量、高精度测距,全天候工作。缺点是易受电磁波干扰,且造价偏高。
方案四:
(1)超声波在空气中传播的速度是340m/s,光波的传播速度是3×108m/s,前者仅为后者的百万分之一,因此可以直接测量距离较近的障碍物。
(2)超声波是一种声波,可识别透明、半透明的玻璃,因为它对光照、色彩都不敏感。即使是黑暗、有毒、有灰尘或烟雾的恶劣环境中也可以使用,因为它对外界光线和电磁场不敏感。
(3)超声波传感器易于小型化与集成化,因为它的体积小、构造简单、性价比高、处理信息稳定可靠,实时控制简单有效。
综上所述,选择方案四。
2.2.1 STM32微控制器的选型
方案一:之前做课程设计的时候会选择C51单片机作为微控制器,他最重要的优点就是制作成本低,性价比比较高,能实现基本的功能。C51单片机出现较早,研究至今,已经有了大量的成果,因此,我们参考大量有价值的资料,给我们节省了大量的工作。C51单片机从出现以来,被广泛利用,也由此衍生出各种系列产品,为人类的科技进步做出了巨大的贡献。C51系列单片机的缺陷是配置不够高端,内部构造有点陈旧过时,由于其IO口数量有限,大型电子项目中几乎无处施展。现代社会科技的发展越来越系统化,已经不能跟上时代的步伐,如果只是简单的功能实现,可以考虑C51微控制器。
方案二:选择MSP430单片机,它集高性能与低功耗于一身,高性能体现在具有16位的数据处理能力,内部哈佛总线构造提升了代码执行的速度,提高了工作效率。16个IO口含有中断功能,配有12位A/D转换器,基本定时器(Basic Timer)的特点是超低功耗、片上外围模块丰富、处理能力强、模拟技术性能高、系统工作稳定。其中功耗很低的优点,可以达到节能的要求。MSP430单片机的价格比C51稍贵一点,相对来说性价比高,但它的不足就是本设外设有限,很难实现更加复杂的功能。所以对于本课题还是有一点美中不足的。
剩余内容已隐藏,请支付后下载全文,论文总字数:18329字
相关图片展示: