论文总字数:29420字
目 录
1绪论 5
1.1 车载雷达算法研究的目的 5
1.2 车载雷达当前的应用背景 5
1.2.1测速雷达 5
1.2.2障碍物探测雷达 5
1.2.3自适应巡航控制雷达 5
1.2.4防撞雷达 5
1.2.5其他车辆监督和控制雷达 5
1.3 FMCW技术的量程测量原理 6
1.4 恒虚警率的介绍 6
1.5 MUSIC算法原理的介绍 6
2研究方法和步骤 7
2.1FMCW波形方向研究 7
2.1.1FMCW波形的创建 7
2.1.2目标模型的创建 8
2.1.3雷达系统的设置 9
2.1.4雷达信号的模拟 9
2.1.6范围和多普勒估计 10
2.1.7范围多普勒耦合效应 11
2.1.8三角扫描 11
2.1.9双射线传播 12
2.2MUSIC算法方向研究 12
2.2.1清零操作 12
2.2.2参数设置 13
2.2.3采样参数设置 13
2.2.4运动物体和雷达的参数设置 13
2.2.5波形产生 14
2.2.6消除多径效应 14
2.2.7降采样 15
2.2.8范围和多普勒估计 15
2.2.9距离、速度的去耦 16
2.2.10构建DOA阵列流型数据 16
2.2.11 执行MUSIC算法 16
3仿真所得图形 16
3.1FMCW波形方向 16
3.2 MUSIC算法方向 18
4实验结果总结 22
参考文献 22
致谢 24
附录 25
77GHz周界雷达的算法研究
顾航
,China
Abstract:The algorithm of 77GHz perimeter radar is studied, and the application of radar system in life is more extensive. Therefore, in order to detect their operation process, we use matlab internal simulation system to study it. Because it can not be as accurate as the radar system in real life, we focus on the two main applications from FMCW waveform and MUSIC algorithm. The purpose is to study the movement speed of the vehicle's radar in front of the object and the detection of the distance itself Process, simulation of the simulation and show the results of the waveform.
Key words:Radar, FMCW, MUSIC algorithm, waveform
1绪论
1.1 车载雷达算法研究的目的
汽车雷达,的含义就是在汽车或其他地面机动车辆等方面有应用的的雷达。所以,它包含了采用不同种类的技术(例如laser, ultrasonic, microwave)的许许多多不一样的雷达,有着不同的功能(例如探测到障碍物、对碰撞预测、自适应巡航控制),还有使用不一样的的原理(比如脉冲雷达、FMCW雷达、微波冲击雷达)进行工作。我们可以从3个层面来理解对于汽车雷达的需要。在国家这个层面来说,车辆事故所产生的的财产损失和人员伤亡的统计数据,以及一些技术方面的手段可以防止部分事故的发生的估计数据,这些使得应用于机动车的雷达有非常好的发展前景。由这些事故的发生而产生的的经济损失与机动车雷达拿日渐低廉的的成本之间的价值比率,成为汽车雷达将会得到非常广泛的应用的一个有力的证据。在汽车生产厂家这个层面来说,雷达系统的安装会极大地刺激消费者的购买欲望,这也就成为了提高销量的一个得力帮手和与其他厂家竞争的垫脚石。而且从法律层面和主管公共安全的部门来说,他们也会迫切希望更加安全的带有雷达系统的车辆的普及。从从购买汽车的消费者层面来说,汽车雷达作为一个可以保证自身安全的工具,它体积不大,使用不麻烦况且智能化又不会产生较高的额外附加价格,这个对于购买者来说是一个重要的考虑因素。汽车雷达的一个更大的益处在于,对于新手车手而言,它的测速测距功能会提醒新手如何安全地控制自己的车速以及位置,从而在行车过程中如同吃了一个定心丸;而对于老司机来说,如果在行车过程中出现了较为疲惫或者需要分散注意力的情况,汽车雷达那比人脑测算要精确许多的辅助功能也显得锦上添花。因此,对于这类车载雷达的算法的研究和模拟是有一定的意义的。
1.2 车载雷达当前的应用背景
目前市场上应用的雷达主要有以下的几种:
1.2.1测速雷达
它是依据车轮的转速来换算出车辆的运动速度。
1.2.2障碍物探测雷达
当遇到雾霾天气前方能见度很低或者几乎没有能见度的时候,人眼无法识别前方道路状况,这时这种雷达的功效就是判断前方路劲上有无障碍物影响通行
1.2.3自适应巡航控制雷达
传统的巡航控制能使得车辆以一个恒定的速度行驶,大前提是周围有一个可以匀速行驶的行车环境。所以当车流量略大时,一维经常会有超车堵车或者换道甚至遇到紧急情况的时候,车辆经常需要改变自身的运动速度,在这个时候。传统的巡航控制就显得用处不是很大了。自适应巡航控制能够根据车辆的周遭情况,灵活的调控车辆的速度以使得车辆与前车保持一个安全的距离。
1.2.4防撞雷达
这种雷达根据前方道路上物体与自身的距离以及当前车辆的运行速度对车主进行提醒,它适合在能见度非常低甚至没有能见度或者车主对前方状况不便作出判断的情况下使用,它的用途是提示车主打开安全气囊或者使用其他制动功能或者调控速度等以保证行车的安全。
1.2.5其他车辆监督和控制雷达
雷达可以帮助我们完成很多比如车辆识别、定位、车队监督、车站调度、导航、选择行车路线等日常生活中所需要的功能。这些雷达的防止地点选择车上或者地面上均可,车辆装载着雷达信标或反射器,甚至可以以车辆编码的方式对每辆车进行识别。
1.3 FMCW技术的量程测量原理
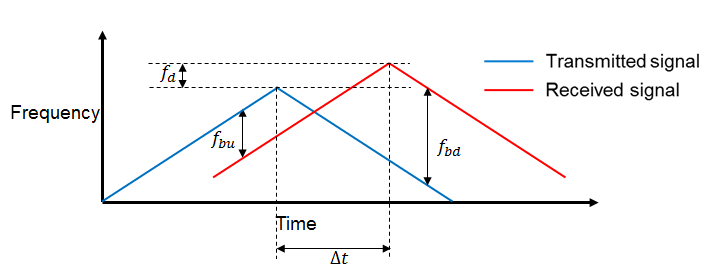
所收到的的信号是发出去信号的以一个时间段进行延时所生成的,而范围是决定这个延时时间的因素。 由于频带总是被信号扫过,无论何时只要是在扫描过程中,发送信号和接收信号之间的定值就是频率差fb。 fb通常称为拍频。 由于我们进行的是线性扫描,因此所需要的时间延时量可以根据之前的拍频得出,自然而然的,范围量就能根据这个时间延时导出来了。

图1 FMCW技术的量程测量原理图
1.4 恒虚警率的介绍
在针对仅有一个目标物体的情况下寻找最大值,然而在存在多物体的情况下需要通过恒虚警率在针对存在多物体目标的情况下寻找极大值。在检测雷达信号的过程之中,当在外界的干扰强度并不是固定而是会发生变化的情况下,雷达的灵敏度是可以通过它的自身来自主调节的,通过这种方式使得雷达的虚警概率不会产生变化而是保持稳定。信号在高强度干扰存在的环境之下提取时,不单单是它的信噪比要求具有一定的数值,而且对信号进行的恒虚警处理是至关重要的。对于自动检测系统中的一些的检测门限来说,往往只是干扰电平产生的几个分贝的增大变化,它的虚警率还是会产生巨大的增幅,在这种情况下产生的结果会有好比说类似显示器画面的饱和或者计算机的运作功率过载的情况,所以这个时候即便是信噪比的数值已经到达了足够大的程度,任然不能得出较为准确的判断。所以让恒虚警处理设备在雷达系统的监测过程中运作就显得相当的有必要了,从而使得整个系统的运作在较强的干扰环境下仍然能够正常地运行。
1.5 MUSIC算法原理的介绍
MUSIC算法 是一种用于矩阵特征空间分解的方法。从几何的方法来说,我们把用信号子空间和噪声子空间来共同组成信号处理的观测空间,在位置关系上这两个空间存在正交的关系。对应于阵列接收到的数据协方差矩阵中与信号的特征向量组成了信号子空间,对应于协方差矩阵中所有最小特征值(噪声方差)特征向量组成了噪声子空间。
MUSIC算法是空间谱估计测向理论的非常关键的基础。下面列出了算法的原理:
(1) 无论测向天线阵列形状是怎么样的,也无论入射来波入射角的维数有多少,我们设由M个阵元组成了阵列,那么可以用:Y(t)=AX(t) N(t)来表示阵列输出模型的矩阵形式。
其中,监测到的阵列输出数据的复向量是Y;存在于未知的空间信号复向量是X;存在于阵列输出向量中的加性噪声就是N;阵列的方向矩阵就是A。找方法估算出入射到阵列的空间信号的个数D以及空间信号源的强度及其来波方向就是MUSIC算法所要解决的问题。
(2) 在真正的操作过程中,次数非常少的样本大都才是Y在较短的限定时间内所能得到的,而在这个时间段之内,如果在方向这一层面上来波并没有产生太大的变动,且与信号关联并不是很大的白噪声是其所能接收到的噪声,那么就把Ry设置为阵列输出信号的二阶矩。
- 分解掉Ry的特征值是MUSIC算法的最关键的组成部分,使用特征向量创建两个相互正交的子空间,即前面所提到的信号子空间和噪声子空间,再进行之前所提到的分解操作。
(4) U是非负定的厄米特矩阵,因此分解操作之后所产生的的特征值都是非负实数,内部含有M-D个小的特征值和D个大的特征值,信号子空间Us由对应于大特征值的特征向量所构成,噪声子空间由对应于校特征值的特征向量所构成。
(5) 噪声特征矩阵有被当做列向量的噪声特征向量所组成 ,同时形成M-D维的噪声子空间Un,正交仍然是信号子空间和噪声子空间二者的位置关系。在这里信号子空间恰好与Us的列空间向量发生了完全吻合的重叠,所以噪声子空间和Us的列向量同样也存在着正交的关系,所以可以用来创建空间谱函数。
(6)谱函数的最大值是在空间谱域算出来的,来波方向角的估算数据就是它的谱峰所对应的角度。
2研究方法和步骤
2.1FMCW波形方向研究
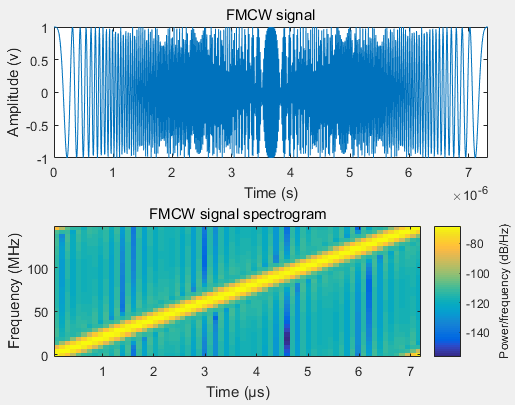
2.1.1FMCW波形的创建
雷达系统不间断地测算自身车辆与另外的车辆之间的距离,当两者的距离缩短到一定程度的时候它会提醒驾驶员。ACC系统中使用的流行波形是FMCW。
设置ACC时注意,200米左右一般来说是雷达所需要监控的最大范围,系统应该能够对距离为一米的两个目标进行分辨。 根据这些要求,可以计算波形参数。
剩余内容已隐藏,请支付后下载全文,论文总字数:29420字
相关图片展示: