纯电动船舶续航里程的预测研究毕业论文
摘 要
近年来,纯电动船舶相关技术发展迅猛。与纯电动汽车一样,续航问题严重制约着纯电动船舶的发展。对纯电动船舶而言,由于船上携带的电池数量有限,导致航行里程与传统船舶相比较短,且船舶不同于汽车,船舶的续航里程与水流速度有很大关系,单凭经验很难确定续航里程的大小,因此会让驾驶员产生航行焦虑感,甚至有可能影响到船舶航行的安全性。所以,为了降低驾驶员在驾驶纯电动船舶中的航行焦虑感、提高船舶的航行安全性,通过建立合理的里程预测模型,对纯电动船舶的续航里程进行预测研究是十分必要的。
本文主要对纯电动船舶航行时的能量消耗进行研究,分析并计算船体所受阻力,根据相关公式分析船体、螺旋桨与推进电机三者在船舶能量转换中的关系,最终根据推进电机的输出功率实现里程预测。基于Matlab/Simulink建立电力推进系统模型,根据船舶目前动力系统的状态,对续航里程做出合理的预测,并根据目标航行距离,给出建议航速。设计GUI页面,关联电力推进系统模型,将仿真结果直观地展示给船舶驾驶员,以期能够有助于降低驾驶员在海上航行时因续航里程不足所带来的焦虑感,提高船舶安全性。本文还通过马尔科夫过程理论,给出预测不同航速下电机的输出功率的方案。
关键词:纯电动船舶;船机桨匹配;GUI;马尔科夫过程
Abstract
In recent years, the related technology of all-electric ships has developed rapidly. Same as all-electric vehicles, the problem of cruising radius severely restricts the development of all-electric ships. For all-electric ships, due to the limited number of batteries carried on board, the cruising radius is shorter than that of traditional ships and the ship is different from the car. The cruising radius of the ship has a lot to do with the flow rate, and it is difficult to determine the cruising radius based on experience alone. So it will make the driver feel anxious about sailing and may even affect the safety of the ship's navigation . Therefore, in order to reduce the driver's anxiety in driving a all-electric ship and improve the safety of the ship's navigation, it is necessary to predict the cruising radius of a all-electric ship by establishing a reasonable mileage prediction model.
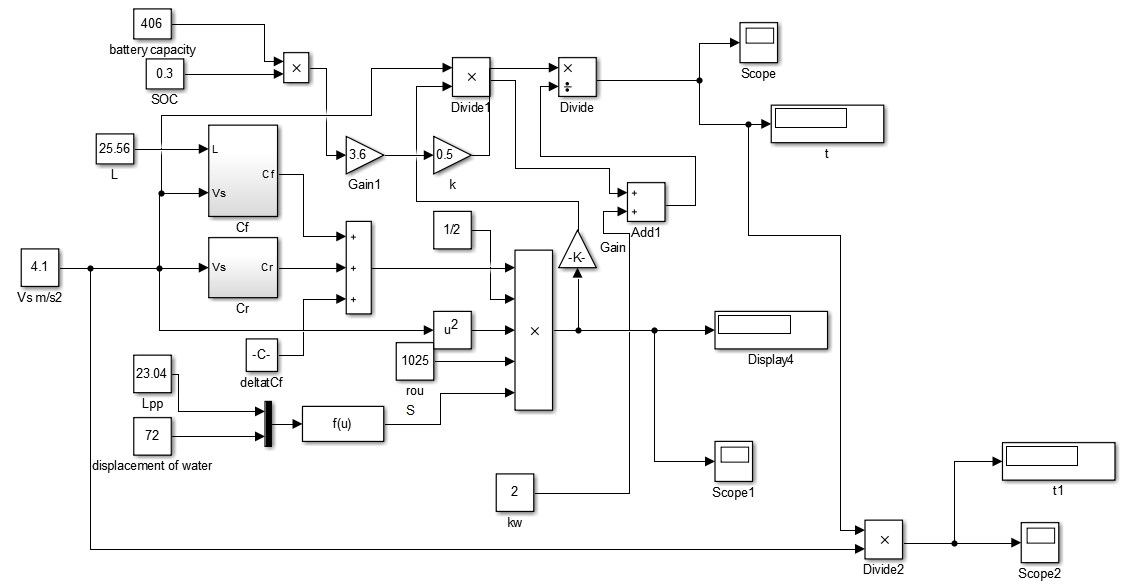
This article mainly studies the energy consumption of all-electric ships during navigation, analyzes and calculates the hull resistance, and analyzes the relationship between the hull, the propeller and the propulsion motor in ship energy conversion according to the relevant formula, and ultimately based on the output power of the propulsion motor to achieve mileage prediction. Based on Matlab/Simulink, an electric propulsion system model was established. Based on the current state of the ship's power system, a reasonable prediction of cruising range was made, and the recommended speed was given based on the target voyage distance. GUI pages are designed and associated with the electric propulsion system model. The simulation results are displayed to the ship driver intuitively, in order to help reduce the driver's anxiety caused by lack of cruising range at sea and improve the safety of the ship. This article also uses the Markov process theory to give a program to predict the output power of the motor at different speeds to achieve mileage prediction.
Keywords: All-electric ships; Ship motor propeller match; GUI; Markov process
目 录
第1章 绪论 1
1.1选题研究背景和意义 1
1.2纯电动船舶发展现状 1
1.3纯电动船舶续航里程研究发展现状 2
1.4本文主要研究内容 3
第2章 船舶航行阻力分析与计算 5
2.1引言 5
2.2船舶航行阻力成因与分类 5
2.3船舶阻力的计算 6
2.3.1摩擦阻力的计算 6
2.3.2剩余阻力的计算 8
2.4本章小结 8
第3章 船机桨匹配分析与计算 9
3.1船体模型 9
3.2螺旋桨模型 10
3.2.1螺旋桨的敞水特性 10
3.2.2螺旋桨与船体的相互作用 10
3.2.3螺旋桨特性拟合计算 13
3.3电机模型 14
3.4船机桨匹配模型 15
3.5本章小结 15
第4章 续航里程预测分析建模与GUI的搭建 16
4.1里程预测模型分析 16
4.2里程预测模型仿真 17
4.2.1实际船舶模型的仿真 17
4.2.2续航里程与速度的关系 19
4.3 GUI页面的搭建 20
4.4本章小结 22
第5章基于马尔科夫过程的续航里程预测 23
5.1马尔科夫过程 23
5.2续航里程的随机预测 24
5.3本章小结 25
第6章 总结与展望 26
6.1全文总结 26
6.2研究展望 26
致 谢 28
参考文献 29
第1章 绪论
1.1选题研究背景和意义
近年来,能源短缺和污染问题引起了人们的普遍关注,清洁能源的应用已经成为各研究领域的热点。船舶在进行生产运输的过程中会产生大量气体排放,船舶排放已经成为主要大气污染源之一[1]。随着各国排放标准日益严格,船舶排放的管控力度也在加强,船舶行业清洁绿色发展迫在眉睫。
当今纯电动船舶相关技术发展迅速,纯电动船舶是目前新能源船舶的研究热点之一。纯电动船舶是指以电能为动力的船舶,一般采用蓄电池和超级电容作为储能装置,通过储能装置向推进电机提供电能,驱动推进电机运转,再通过传动装置为螺旋桨提供动力,从而推进船舶前进。纯电动船舶能够减少船舶污染物排放80%以上,能够有效地解决船舶排放污染问题,很好地适应了当今节能减排的发展潮流。而且电力推进还具有良好的经济性、操纵性和机动性,在一些环保要求较高和有特定动力性能要求的场景下应用广泛,具有广阔的发展前景。
与电动汽车一样,纯电动船舶的发展受限于电池相关技术的发展[2]。船舶装载的电池由于成本、重量、能量密度等因素提供的电能有限,使得电动船的运行时间、速度和距离也受到限制,即使是较先进的纯电动船舶,续航时间和采用内燃式发动机作为推进动力的传统船舶相比也是相当短的。从操作安全的角度,船舶驾驶员必须知道电池的剩余容量,并计算船舶的续航里程,以此来随时决定船的速度。这些关于电动船的信息将不仅取决于电池的物理特性而且还取决于风,波浪等环境条件。为了获得这些信息,对环境条件和物理性质的估计是相当重要的。对纯电动船舶而言,由于航行里程短,且船舶不同于汽车,船舶的续航里程与水流速度有很大关系,单凭经验很难确定续航里程的大小,会让驾驶员产生焦虑感,甚至有可能影响到船舶航行的安全[3]。所以,为了降低驾驶员在驾驶纯电动船舶中的航行焦虑感、提高船舶的航行安全性,通过建立合理的里程预测模型,对纯电动船舶的续航里程进行预测研究是有必要的。
1.2纯电动船舶发展现状
近年来,随着纯电动船舶相关技术的发展和成熟,国内外不断有实验和商用船舶下水。国外方面,2008年德国汉堡市运营了世界上第一艘由燃料电池驱动的纯电动客船。东京海洋大学在2010年制造了快速充电即插式电池推进船“雷鸟1号”。2015年由西门子公司与挪威造船厂合作研制并建造的世界第一艘由电池驱动的电动渡轮正式投入运营。
国内方面,2012年在厦门的筼筜湖运营了我国第一艘商业运营的纯太阳能游览船。2017年上海瑞华(集团)有限公司和武汉理工大学等机构联合研发出全国首艘吨位为500吨级的新能源电动货船。2017年广州发展瑞华新能源电动船有限公司建造了世界第一艘千吨级纯电力推动的载重船舶,在广州整体吊装下水,并于2018年初已投入内河煤炭的运输。
随着蓄电池、超级电容技术以及能量管理策略的不断发展,在内河航运等短途运输领域中纯电动船舶已经可以取代由内燃机驱动的传统船舶,以降低大气污染。但是,纯电动船舶在实际运用中,仍然需要解决初始投资高,续航较短和动力性能不足等问题。
1.3纯电动船舶续航里程研究发展现状
本文中定义续航里程为纯电动船舶在电池组剩余一定SOC下,在一定的航行工况下,能够继续航行的距离。续航里程最大的影响因素是蓄电池数量,蓄电池的数量越多,整个储能装置的容量越大,船舶续航里程也就越长。然而电池的数量增多会极大地增加成本,使船舶储能系统的经济型变差。因此根据船舶的动力性需求,对电动船舶储能系统的设计进行改进来合理地配置电池数量,对于提升船舶性能和增加续航里程具有重要意义。
目前国内外与续航里程相关的研究主要集中在电动汽车领域,并且获得了一些成果,这对于研究船舶的续航里程具有重要的参考意义。国内外电动汽车领域相关研究的现状如下:
唐瑜亮[4]通过对纯电动汽车的牵引力、行驶速度和主电路电流等主要相关参数进行研究,确立了电机各主要技术参数之间的数学关系,研究并总结了影响纯电动汽车续航的主要因素。文章最后根据能量守恒原则,分别计算了在不同工况下的续航里程。毕军等[5]提出利用数据驱动的方法来研究汽车续航里程与SOC的关系。首先对原始数据进行处理,然后对电动汽车续航里程和SOC的相关性进行研究分析并建立相关模型,利用最小二乘法辨识模型的相关参数。最后通过对物流电动车的数据进行分析,对模型参数辨识的结果进行了验证,证明了该方法的有效性。尹安东等[6]通过对汽车行驶时的典型工况进行研究分析和状态识别,并在进行工况识别的基础上对电动汽车的续航里程进行仿真估算。最后通过进行 ECE15 工况下的实车测试验证,将实验结果与预测结果进行比较,验证该方法的有效性和精度。 Du C Q,Du G,Tan K C等[7]建立了电动汽车的续航里程预测模型。通过比较仿真和估算结果,发现了影响续航的主要因素,并通过修正参数法对仿真模型进行优化并进行测试。测试后的结果显示,经过修正参数法优化后的模型能比较准确地预测一定工况下的续航里程,能够较好地符合精度要求。
目前在电动船舶领域,国内外关于续航里程的资料相对较少,理论上主要利用能量守恒定理,结合其他影响因素进行综合分析。国内外电动船舶的部分相关研究现状如下。
陈朝煌[8]通过EKF算法对SOC进行了估计,并通过对游览船的能量平衡分析,研究船舶的能量转化过程。经过船机桨匹配计算得出船舶匀速航行时推进电机的输出功率,结合SOC的研究结论实现对于船舶续航里程的预测。东京海洋大学在2010年制造了快速充电即插式电池推进船“雷鸟1号”,并通过实船实验得出了船舶在不同负载下输出功率和速度的关系,并测量出在不同功率下SOC的变化速率以求出船舶的可运行时间,将其与航速相乘得到续航里程[9]。
对于应用不同动力的船舶来说,不管是锂电池还是复合电源,国内外都有相关的对于船舶里程预测和电源管理的研究,并且已经推出相关算法,搭建出相关模型以及相关交互程序页面。但是目前对于电动船舶续航里程预测的研究仍然缺乏比较系统的理论,而且实船实验较少,缺乏相关数据。
1.4本文主要研究内容
本文在实验室相关研究基础上,以新型景区游览船为母型船,参考纯电动船舶和纯电动汽车的相关研究,在能量守恒的原则上,开展纯电动船舶的续航里程研究。研究主要内容包括:船舶航行阻力的研究;船机桨匹配的研究;预测模型的搭建和仿真结果的分析;利用马尔科夫过程进行里程预测的研究。该研究能够提供较为可靠的续航里程预测从而为船舶处于合理的航行状态提供参考,提高船舶航行的安全性。
主要研究内容的具体分布如下:
第1章介绍课题研究背景及意义,概述了纯电船舶以及续航里程的研究发展现状以及存在的问题。
第2章首先说明船舶阻力的分析对于本文的研究意义,然后分析了船舶阻力的成因并进行了分类,给出了阻力的计算公式,并确定了公式中的一些参数。
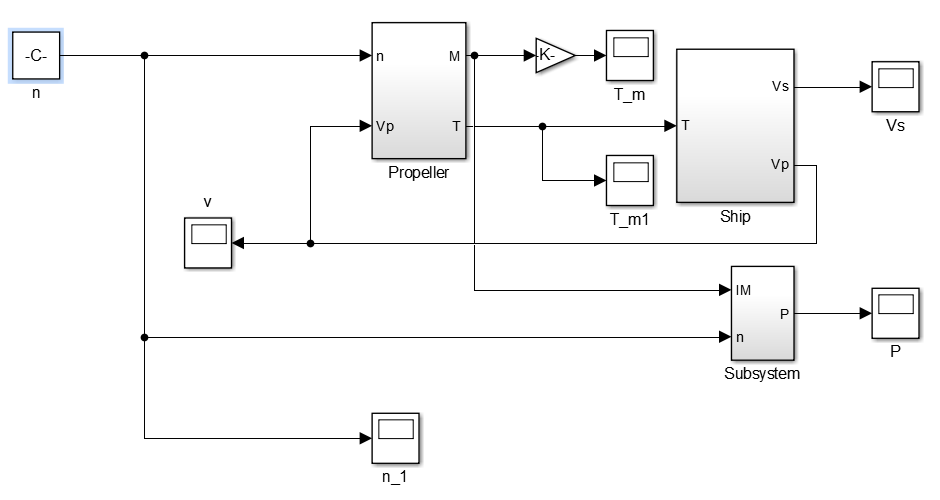
第3章分别分析并搭建了船体,螺旋桨和电机模型,得到了各部分主要计算参数的计算公式,并进行了船机桨的匹配计算搭建出了匹配模型,系统输入螺旋桨转速,输出电机功率。
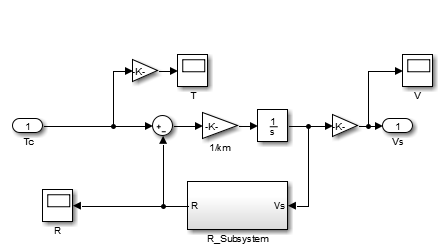
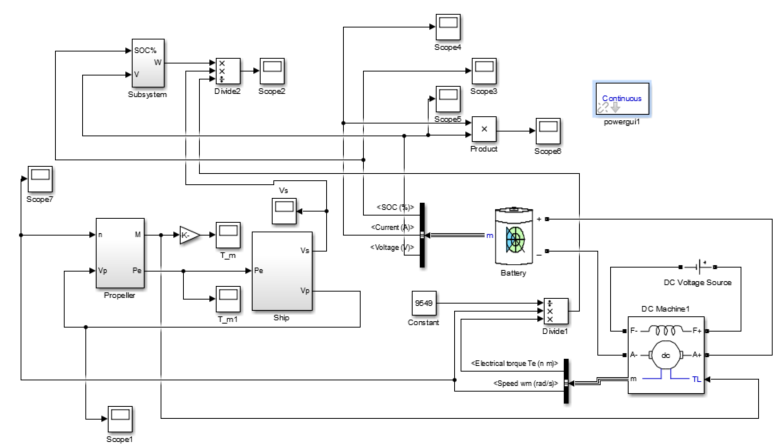
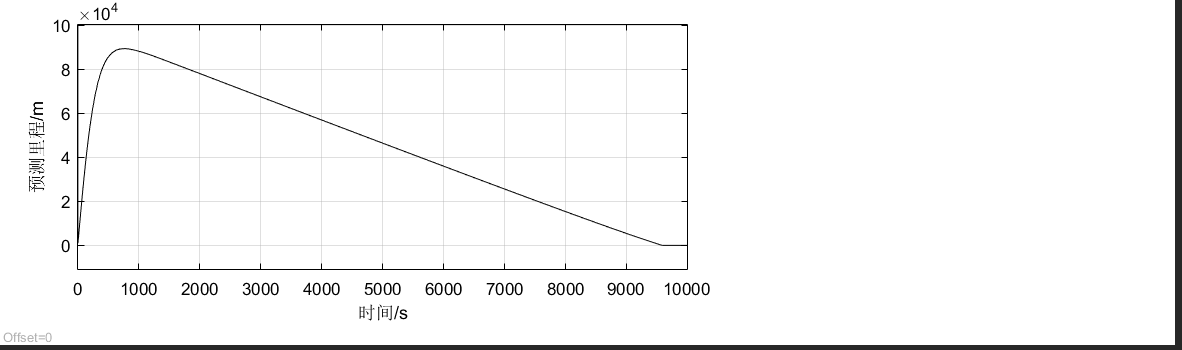
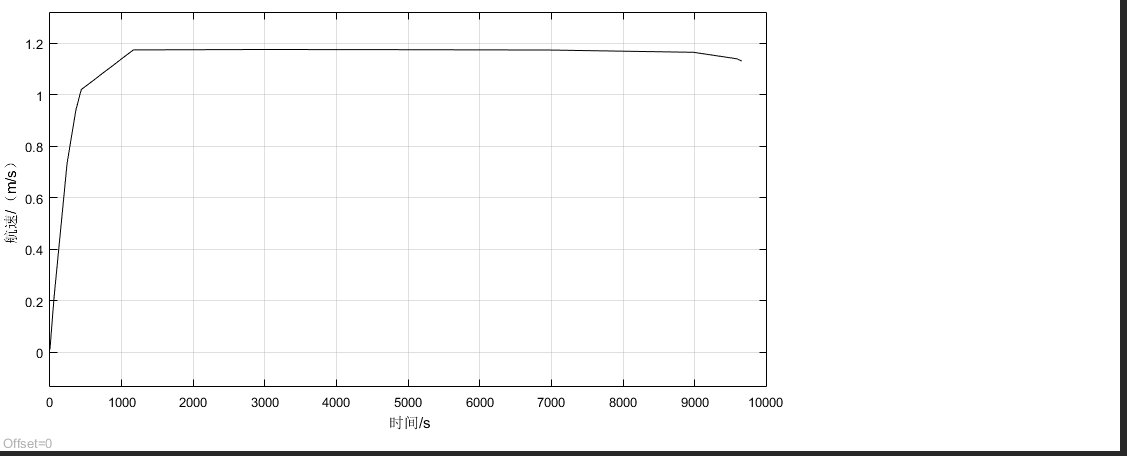
第4章分析并搭建了里程预测模型,并进行了仿真,不仅得到了实际船舶模型续航里程的变化曲线,而且还通过搭建模型得到了续航里程和速度的关系,能够比较好地预测续航里程。GUI页面的搭建更加直观地展示了船舶的航行状态。
第5章基于马尔科夫过程理论,给出了一个预测续航里程的方案。运用数学语言系统地描述了马尔科夫过程,给出了电机输出功率的预测方法,从而达到预测里程的目的。
第6章对本文所做的工作以及工作中存在的不足之处进行总结,并对后续研究的方向给出了自己的建议。
第2章 船舶航行阻力分析与计算
2.1引言
纯电动船舶续航里程的研究目前尚需完善相关的理论分析和进行大量的实际运用,但是在电动汽车领域已经有大量相关研究,因此可以借鉴相关的经验利用能量守恒来对船舶的续航里程进行预测。首先,我们应该对船舶航行过程中的能量转化过程进行分析。
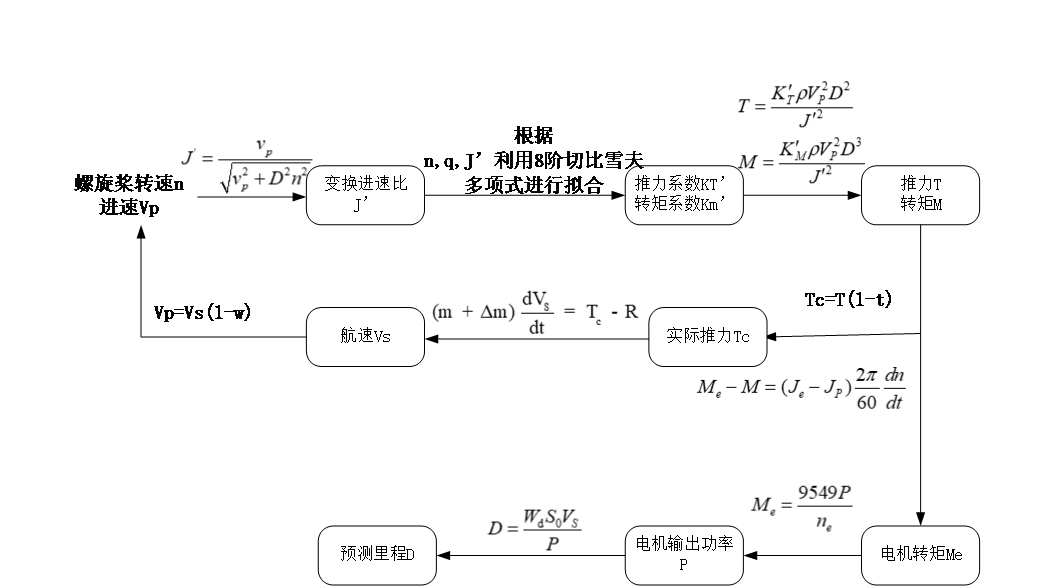
根据能量守恒定律,电池输出电能使得推进电机通过传动装置转化为螺旋桨的推力,螺旋桨产生的推力克服船舶阻力推动船舶前进。因此研究工作主要是分析船体、螺旋桨与推进电机三者在船舶能量转换中的关系,以及船体所受阻力的分析,最终实现船舶的续航里程预测。船舶航行时所受阻力成因众多,在流体中航行远比电动汽车在陆地行驶时的情况复杂。船舶所受阻力是船舶能量消耗的主要原因,阻力的准确分析建模对模型仿真的准确性具有重要意义,本章将对阻力进行具体分析。
2.2船舶航行阻力成因与分类
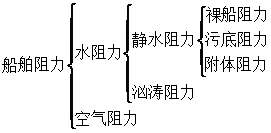
当船舶在水面上航行时,船舶主要受到水和空气两种流体的反作用力,即船舶航行阻力R。水阻力是水下部分的船体受到水的反作用力。空气阻力是水上部分的船体受到
空气的反作用力。水阻力可以分为船舶在静水场中航行时的静水阻力和在波浪中航行的汹涛阻力两部分。静水阻力又可分为裸船阻力、污底阻力和附体阻力三类。
根据这种分类方法,可以将船舶阻力分为以下两大类,一是船体在无流场的水域中所受到的裸船体阻力,是船舶阻力的主要部分,或者成为船舶基本阻力,是应该着重研究的部分;二是外界干扰所形成的附加阻力,包括附体阻力、污底阻力、空气阻力和汹涛阻力。
实际船体阻力可以分为裸船阻力和附加阻力两部分分别进行研究。低速船舶在常规海况下航行时,附加阻力只占船舶阻力很小的一部分。因此,为了便于计算,本文只对裸船阻力进行建模,下文所述的船舶阻力均是指裸船阻力。
2.3船舶阻力的计算
根据船舶周围流体流动现象和产生的原因进行分类,船舶总阻力Rt可分为兴波阻力Rw、摩擦阻力Rf和粘压阻力Rpv三部分组成,即:
Rt=Rw Rf Rpv (2.1)
对于低速船舶来说,船舶的摩擦阻力约占总阻力的1/4,粘压阻力约占1/10,兴波阻力的成分就更小,所以也可以将粘压阻力和兴波阻力合并在一起称为剩余阻力Rr,这样就可以把船舶阻力分为摩擦阻力和剩余阻力两部分,即:
Rt= Rf Rr (2.2)
2.3.1摩擦阻力的计算
船体摩擦阻力的计算可以由式得到:
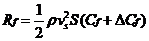 (2.3)
(2.3)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


