论文总字数:27645字
摘 要
本文提出了一套基于视频检测的夜间车辆检测算法,实现了对夜间车辆车型大小、单车车速、车流量、车型比例、道路占有率、速度区间等数据的监测和统计。
夜间车辆检测由于光照不足,视线差,无法仿照日间检测方法对车辆的细节信息进行提取。而且夜间车灯、路灯等带来的光晕等干扰也加大了对车辆判别的难度。为克服夜间视线差对检测的影响,本算法基于对车辆前照灯的检测来实现车辆识别统计。通过对夜间车辆的特征(主要是车灯特征)进行系统地建模,避免了传统方案对多车灯对车辆的重复检测问题,层次化地实现了对夜间车辆的识别以及各个参数的计算和统计。为提高算法的检测效率和实际使用的可操作性,本算法将相机图像坐标和世界路面坐标通过一个射影映射关系相联系。通过标定单应矩阵H,实现了世界坐标和图像坐标之间变换。另外,考虑到夜间视线差,且光晕等寄生效应多,日间广泛利用的背景差分法在夜间容易受到光线突变的影响,本算法采用帧差法提取前景目标,利用相邻帧间高度相关性,极大提高了夜间检测的准确性。
实验中,算法呈现出较高的检测准确率和不错的鲁棒性,有效消除了路灯、光晕等寄生效应的影响。最终检测准确率达到95%以上。
关键词:夜间车辆检测、模式识别、射影映射、前景提取
A STUDY ON VEHICLE DETECTION IN NIGHTTIME
BD Candidate: Yan Xu
Supervisor: Jian Lu, Qiao Wang
Abstract
In this thesis, a nighttime vehicle detection algorithm is presented, which achieve the detection on vehicle type, vehicle speed, traffic flowrate and road occupancy.
The poor vision caused by lacking of light makes it harder to collect the detail of vehicles than do it in daytime. Moreover, the halos and other parasitic effects introduced by headlights and streetlight make the situation worse. To deal with the poor vision at night, we detect the vehicles based on headlights. Through modeling on the nighttime vehicle features (especially vehicle light features), we avoid the wrong detection on vehicles with more than one pair of headlights and fulfil the task of vehicle detection and statistics collection. Taking into account the efficiency and practicability of the algorithm, camera image coordinates and the coordinates of the world ground was linked through a projection mapping. A calibrated homography matrix H can accomplish the transformation between image coordinates and world coordinates. Moreover, given the poor night vision, halos and other parasitic effects, the background subtraction method extensively used in daytime detection is susceptible to sudden change of light at nighttime. This system uses the frame difference method to extract foreground objects. Taking advantage of high correlation between two successive frames, the accuracy of detection is promoted greatly.
In the tests, the algorithm can detect vehicles in the nighttime with accuracy of 95% or even higher and good robustness, which diminishes the impact of parasite, such as streetlight and halation.
KEY WORDS: nighttime vehicle detection, pattern recognition, projective mapping, foreground extraction
目录
摘 要 I
Abstract II
目录 III
第一章 绪论 1
1.1研究背景 1
1.2研究目标和研究内容 2
第二章 相机标定 4
2.1 多视图几何基本理论[4] 4
2.1.1 射影几何 4
2.1.2 射影几何中点与直线的齐次坐标表示 4
2.1.3 射影变换 5
2.1.4 单应矩阵的计算 6
2.1.4.1 直接线性变换(DLT)算法 6
2.1.4.2其他的代价函数 7
2.1.5 摄像机模型 8
2.2 车辆检测情境下的相机标定方法 11
2.2.1 标定原理 11
2.2.2 两种标定方案 12
2.3 本章小结 13
第三章 夜间车辆检测方案设计 14
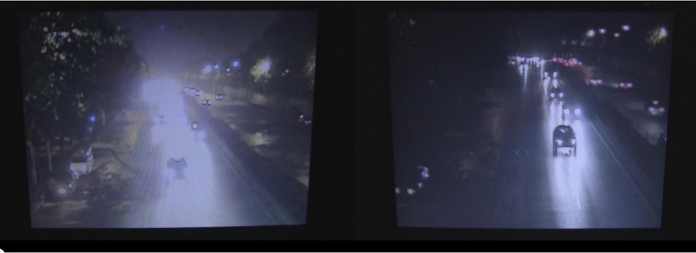
3.1 夜间检测场景特点及采集装置选取 14
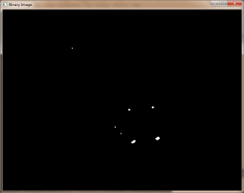
3.2 前景提取模块 15
3.2.1几种常用的前景提取方法 15
3.2.2前景提取模块方法选取 15
3.2.3前景提取模块的工作流图 16
3.3 视频数据处理模块 17
3.3.1连通分量提取和数据化 17
3.3.2判断与剔除 17
3.4 车辆识别模块 17
3.4.1 模型分析 17
3.4.2 模型建立 18
3.4.2.1 车灯对识别 19
3.4.2.2 车辆识别 21
3.5 车辆追踪与统计模块 21
3.5.1 车辆追踪方法 21
3.5.2 车辆统计模块 22
3.5.2.1 车型大小和车型比例 22
3.5.2.2 单车车速和速度区间车辆统计 22
3.5.2.3车流量统计 22
3.5.2.4占有率统计 23
3.6 本章小结 23
第四章 结果与讨论 24
第五章 总结与展望 26
5.1 总结 26
5.2展望 26
参考文献 28
致谢 29
第一章 绪论
1.1研究背景
随着当今社会经济的高速发展,机动车的保有量急速增加。无论哪个国家都受到不同程度的交通问题困扰。这种情况严重影响了我们的生活质量,也阻碍了人类经济和社会的发展。交通拥堵不仅造成车主时间的浪费,也对环境带来不利影响,更造成能源的浪费。据统计,日本东京每年由于交通拥堵造成大约1000多亿美元的损失。在我们国家,许多城市内平均车速已经低于20km/h,平均每天北京市的堵车时间约2个小时。据荷兰交通导航服务商TomTom提供的统计数据,全球交通拥堵排名前30位中中国城市占据1/3。为解决交通问题对经济发展带来的阻碍,世界各国都已经在这方面投入了巨大的人力物力。
传统的解决方案局限于优化道路建设的规模。然而,道路的修建工程耗资巨大,且重建成本高,适应性差。这些劣势很大程度上制约了传统解决方案的有效性。上世纪80年代,发达国家修建的先进的交通网络,在30年后的今天已然不能满足快速发展的社会的需求。而智能交通系统[1](Intelligent Transportation System,ITS)的研究和开发,将有可能建立一种大范围,全方位对道路交通进行合理调控的机制,极大地提高交通运输效率,改善环境质量和提高能源利用率。1995 年 3 月美国运输部正式出版的《国家智能交通系统项目规划》规定,ITS 包括七大领域:先进的交通管理系统 ATMS、先进的公共运输系统 APTS、先进的旅行者信息系统 ATIS、先进的乡村运输系统 ARTS、商用车辆运营系统 CVO、先进的车辆控制和安全系统 AVCSS、自动公路系统 AHS。
智能交通系统实际上是将传统意义上的人、车辆、道路视为一个整体。结合人工智能、图像处理、通信等技术领域,实现主动地对交通节点进行调控,如:随时通过车载广播、移动终端APP 向车主进行交通状况播报;实时根据道路交通车流量情况对路口交通灯进行控制等。主动的调控措施,可以实现对道路资源利用的最大化。
就车辆信息采集装置而言,国内外研究中采用的主要有以下三类[2]:
(1)磁频车辆检测装置
这类检测器基于电磁感应原理,其基本工作原理是:在各个车道路面下,铺设有若干通有交变电流的环形感应线圈,车辆驶过或停止在其上方时,线圈回路中感应电流发生变化,检测感应电流变化就可以获得车流量等交通参数。
由于这类检测器技术相对成熟、稳定,且检测精度高,在早期得到了较为广泛的应用。但其自身的缺点也是明显的:线圈会随道路的老化而被挤压发生形变,使检测效果下降;线圈需要埋于路面以下,安装和后期维护成本高,且会较大地影响道路交通的正常流转。
(2)波频车辆检测装置
波频检测器的原理是利用微波、超声波和红外波等对车辆发射,通过反射波的变换来检测是否有车辆通过。在车型单一、车流均匀和车速平稳的理想情况下,这类检测器的检测装置较为理想。但遇到交通拥堵,大型车辆通过频繁的情况下,其检测精度会受到极大的影响。除此之外,波频检测器的成本较高且无法获取较为全面的交通参数。
(3)视频车辆检测装置
视频车辆检测装置在近些年发展迅速,且已经成为当下智能交通的应用主体。其工作原理较为容易理解:安装在合适位置的摄像机拍摄监控区域的路面视频,并将视频通过处理器进行图像处理,实时地得出各类交通参数,以供进一步处理的需要。相比其他的检测装置,视频检测装置的优点如下:1.安装和维护成本低。2.摄像机可以获得更为全面的道路交通信息,效率更高。3.视频检测器适应性强,可以适用于各类交通环境。
随着电子技术的快速发展,例如CCD摄像头这样的采集装置的成本日趋走低,另鉴于视频检测器的诸多优点,以及计算机视觉技术的逐步成熟,视频检测已经成为国内外交通检测的主要采集装置。
随着人们生活水平的提高,夜间出行日渐成为一种需求。这也对夜间交通的调控带来挑战。目前,对白天车辆的检测,国内外都已经做了一定的研究,并取得了一定成果。而对于在夜间条件下车辆的检测却比较棘手。总体上来看,夜间交通检测的难点主要有以下几点:1.夜间照明不足,车辆细节无法清晰捕捉;2.夜间车辆灯光照射容易产生光晕,对检测准确率造成较大影响;3.夜间路段照明变化明显,有的地段有路灯,有的路段无照明,道路对车灯的反射也会对检测造成干扰等。总体而言,由于夜间光线暗,车辆特征主要通过车量前照灯来体现[3],相关研究以车辆前照灯为基础的检测具有较好的可行性和鲁棒性。
道路交通实现对车辆识别和参数测定的基础是对行驶中的车辆准确检测和追踪。由检测和追踪结果得到的数据加以处理,可以获得车辆的车型大小、单车车速、车流量、车型比例、占有率、速度区间车辆等数据信息。交通管理者或交通管理系统可以利用这些既得数据对路面交通实现宏观上的调控,以减轻交通压力引起的环境污染、资源浪费以及时间浪费。改善这些状况的同时,也必将大大降低交通事故的发生率,甚至可以同时对违章行为进行判罚。
据相关研究者和工程人员预测,智能交通系统的应用,必将极大地提高城市道路交通的承载能力以及人们的生活质量。智能交通系统具有很好地发展前景发展价值。
1.2研究目标和研究内容
本文主要研究一种有效的算法,以适应夜间交通信息检测的需要。正如前文所述,日间交通信息的检测已经日趋成熟,而夜间交通检测仍处于起步阶段。而随着社会的高速化发展,对夜间交通的宏观统筹调控也逐渐成为一种必要的需求。
夜间交通信息检测由于光照不足,视线差,且夜间车灯、路灯等对摄像机的干扰严重,导致了夜间车辆检测的诸多困难,如:
- 车辆细节难以捕获,准确获取前景目标较日间检测更为困难
- 摄像机在夜间容易受到车灯、路灯照射的影响,引入光晕等寄生效应。对目标准确检测带来干扰
- 由于车型的多样化,有的车辆包含不同高度的多对车灯,甚至同一高度的对个车灯。基于车灯对实现车辆识别,容易造成重复检测
- 视频中可能会包含两个方向行驶的车辆,需要排除对向行驶车辆干扰
本课题主要研究目标为:通过设计合适的算法实现对视频中道路段中通过车辆的车型大小、单车车速、车流量、车型比例、占有率、速度区间车辆进行统计。在保证准确率的同时要提高算法的高效性。
本文的研究内容主要包括以下几点:
- 研究交通场景下的相机标定方法,通过一种切实可行的方式,得出世界平面坐标和相机图像坐标之间的变换关系。
- 确定合适的前景提取方法。研究一种切实高效的图像底层处理方式,提取表征夜间车辆特征的前景信息,以供进一步处理。
- 借助已有的表征车辆特征的信息,实现车辆的有效识别。
- 实现识别车辆的帧间追踪,并给出一套计算方法,对车辆的车型大小、单车车速、车流量、车型比例、占有率、速度区间车辆进行统计。
论文的主体结构如下:
第1章是绪论部分,主要介绍了智能交通在当下的发展背景以及车辆检测的研究进展与状况。提出视频采集装置的有效性和通用性。
剩余内容已隐藏,请支付后下载全文,论文总字数:27645字
相关图片展示:



该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

