论文总字数:16297字
目 录
1前言 1
1.1 课题研究背景 1
1.2 相关技术现状及发展趋势 1
1.3 直流电机控制方式 2
2设计目标 3
3系统设计与方案论证 3
4系统硬件模块选择与方案实现 5
4.1 系统主控单片机的选择 5
4.2 电机及测速模块的选择 5
4.3 电机驱动模块的选择 6
4.4 无线模块的选择 6
4.5 输入交互和显示模块的选择 6
4.5.1 输入交互 6
4.5.2 显示模块 7
5系统功能原理 8
5.1 测速 8
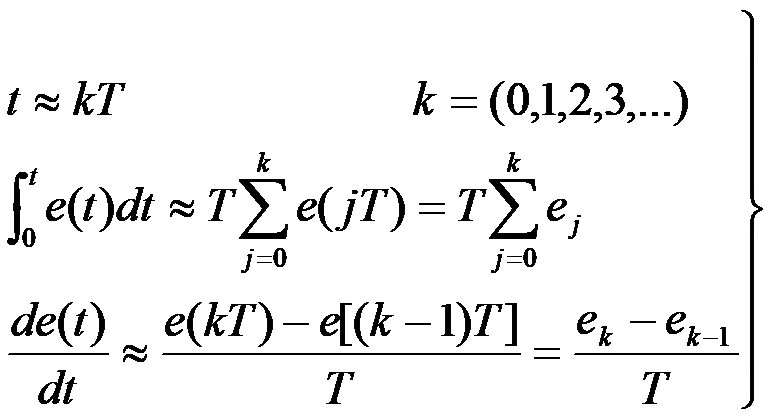
5.2 PID算法 8
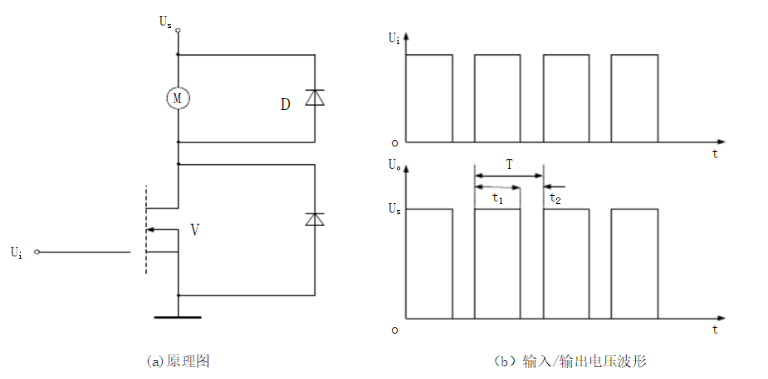
5.3 PWM(脉宽调制) 11
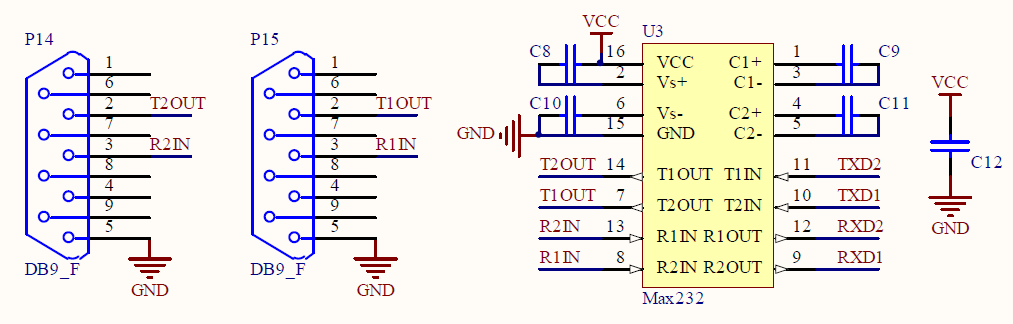
5.4 串口通信部分 14
5.5 上位机部分 15
5.5.1 项目总体设计 15
5.5.2 开发环境 15
5.5.3 设计基本思路 16
5.5.4 蓝牙串口程序说明 16
5.5.5 系统构架 17
5.5.6 应用程序使用流程 17
6实验步骤 18
7实验结果分析 21
结语 22
参考文献 23
致谢 24
一种直流电机闭环调速系统
杨行之
,China
Abstract:With the continuous penetration of computers in the social field, The application of single-chip become more and more widely, and also led to the improvement of the traditional control detection update. This paper describes the design of a DC motor speed control system, the hardware part includes photoelectric tachometer module, DC motor drive module, DC motor, L298N LCD12864, STC12C5A60S2 LCD MCU and Bluetooth module, 5V DC power supply. The software part includes MCU, lower computer software and mobile phone host computer application software. The system through the mobile phone buttons to set the desired speed motor and proportional integral differential (PID) coefficient, as measured by the photoelectric sensor encoder speed and the set value is inconsistent, pulse width modulated waveform by PID closed-loop machine to adjust the output of the microcontroller. Experimental results show that through Bluetooth, the mobile phone can set the desired speed, and the motor can achieve positive and negative rotation. The speed is within the range of 20-60r/s, and the control error is less than 3r/s.
Key words: PID control algorithm; SCM ; Andrews
1前言
1.1课题研究背景
当前,自动控制技术在日常生活的方方面面都有广泛的应用,在运输、生产、控制等领域应用更加广泛,其中就涉及到对直流电机转速的监测与控制。对于直流电机系统来说,早期比较主流的技术是通过电池为直流电机提供电能,控制系统普遍使用开环控制系统,难以根据需要实现恒定调速。单片机运用使得原本用模拟控制的直流电机渐渐过度到了数字控制。人们把电力电子技术中的桥式电路与单片机进行连接使用,当占空比改变时,PWM脉冲波形通过单片机来改变。通过改变脉冲波形来改变直流电机两端的电压,从而来调节直流电机转速。
1.2相关技术现状及发展趋势
直流电机的控制,主要有两个方面,包括电机转向及速度控制。 由于直流电机的工作主要是通过将电能利用电流产生可变磁场,通电导体在磁场中受力将电能转化为机械能,从而产生扭矩,带动负载装的转动。大的扭矩的需要更高的功率,这就需要大的驱动电流产生大的磁场。直流电机的驱动一般采用电流放大电路,典型的包括三极管电流放大。 目前直流电机的驱动有复合三极管桥式电流、集成电路ULN2003、L298N等。复合三极管桥式电路焊接麻烦,受噪声干扰大,目前很多均采用集成电路驱动模块。其中ULN2003为负逻辑电流放大模块,L298N为正逻辑电流放大模块,本文设计采用了L298N模块。
直流电机的速度测量,主要光电、电磁、计算机视觉等几种方法,光电测速主要有光电码盘测速、光电编码器等。其中光电码盘的测速,主要是通过电机转动一周,对应转轴上的码盘不断遮挡光路,当光路导通和遮挡是会产生不同的电平,通过固定时间内的脉冲个数和码盘的通孔数来获得电机的转速。码盘上光电通孔数越多,测量精度越高,但传感器采集处理的时间也变长,响应时间长。光电编码器需要通过连杆同轴构件与直流电机同轴,虽然精度高,抗干扰性强,但安装麻烦。基于霍尔效应的电磁测量方法,需要在转轴上加装磁性材料,基本也能满足精度不高的测量要求,也需要利用计数器进行计数,需要增加霍尔感应元件。
脉冲宽度调制波形的产生,目前有很多种方法,有结合比较器的模拟电路产生方法,也有数字电路产生方法。作为脉冲宽度可控的需要,一般采用数字单片机来实现。 很多单片机定时/计数器自带PWM产生电路,通过比较器和计数器来完成,低端的单片机没有专门模块,需要利用定时器来模拟产生。自带PWM电路产生波形速度快,波形翻转变化形式多样,但单片机价格要高一些。
1.3直流电机控制方式
控制方式一般有两种,一种方式是开环控制,二是闭环控制。开环控制的优点是系统结构相对简单、实现起来比较方便,在构成系统的各元器件各项参数值较稳定,且没有外界干扰或比较小的情况下,开环控制基本能保证需求。但通常开环控制精度不高,同时既不能检测出偏差,也不能纠正偏差,使误差得到不断累积,难以满足需求。
闭环控制与开环相比控制精度更高,而且对外界干扰和元器件参数变化有良好的抑制作用,还可以通过输出反馈来实现对系统的控制。其缺点是结构较为复杂,同时存在关于稳定,振荡,超调等一系列问题。
一个经典的闭环控制算法被称为PID(比例(P),积分(I)和差分(D))控制算法,是目前最为广泛应用的一种闭环自动控制器。其原理比较简单,易于实现,三个控制参数的应用是相互独立的,并且在理论上已经可以证明,在对于“一阶滞后—滞后”和“两阶滞后 纯滞后的控制对象的控制,PID控制器是一种最优控制方法。
PID调节是一个非常有效的方法来校正连续系统的动态质量。它的各种参数通过简单的设置和灵活的改变结构,只要通过合理地整定参数,就能快速的解决闭环控制中存在的关于稳定,振荡,超调等等问题。
1.4本课题主要研究内容
本论文设计了一个典型的直流电机调速调向系统,利用自带PWM波形产生模块单片机,结合定时器0、1、2实现电机的测速和驱动。核心问题是PWM波形的产生、光电码盘的测速、上位手机的参数设置、蓝牙通讯等。 电机速度的控制主要是通过改变电机两端的电压平均值,通过PWM脉宽调制技术控制转速,形成一个转速闭环的控制系统。人机交互采用的是液晶屏和按键,按键用于参数的设定以及正反转的控制,启动后通过液晶屏来显示电机的当前转速信息。本课题的硬件主要包含控制模块、电机驱动模块、速度检测模块、按键模块和显示模块等。该系统的上位机软件部分是用java语言。它具有可移植性强,算法易于实现,易于调试和修改的特点。
2设计目标
本次设计将实现基于基本的增量式PID控制算法,设计出一种直流电机测速及调速系统,实现对直流电机转速的实时测量及自动调节电机转速。实验目的如下:
- 实现直流电机的速度测量
- 实现PID控制算法
- 利用PWM脉宽调制方式驱动电机
- 利用无线技术进行串口异步通信
- 实时速度等信息的数字显示
- 上位机软件的编程
3系统设计与方案论证
该系统的下位机部分应采用单片机作为实现PID算法的主控单元,拟利用单片机的计数器来计数光电耦合测速输出脉冲信号,从而计算出直流电机的当前转速,然后输入此转速反馈到PID算法中,计算得相应PWM调制值来控制电机的转速。并且能通过开发板上的3个独立按键,分别设定转速的增加或转速的减少以及切换正、反转状态。在这期间,利用液晶屏来显示设定速度、当前速度、正反转信息和错误信息等相关信息,并将PID参数和速度信息通过无线模块经由串口发送至上位机。
上位机部分,应能实现与下位机的串口通信,并绘制系统当前速度变化曲线和当前系统设定的转速值,同时应能显示当前系统的P、I、D参数,能实现实时对下位机的PID参数值进行整定的功能。
系统整体的原理框图如图1:
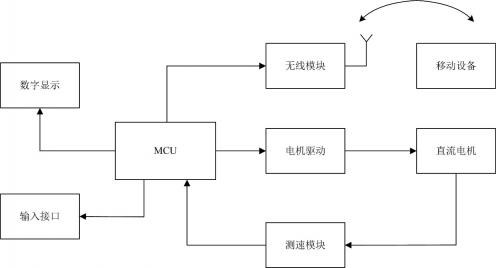
图1 系统原理框图
最终采用的技术方案如图2所示。
下位机部分,主控芯片采用宏晶公司的STC12C5A60S2,它完全兼容传统的51单片机指令。驱动电机使用L298N驱动模块驱动,电机采用5V直流电机模块(带槽型光耦传感器和码盘,电机轴每转1周时将输出4个脉冲信号),输入采用开发板上3个独立按键,数字信息显示采用带字库的LCD12864屏,无线模块采用HC-05串口蓝牙模块与手机配对通信。
上位机部分开发平台为Android,实现与下位机的蓝牙串口通信,并绘制系统的速度变化曲线与当前设定转速值,同时也能实时显示系统的P、I、D参数值,能对下位机的PID参数值进行实时整定。
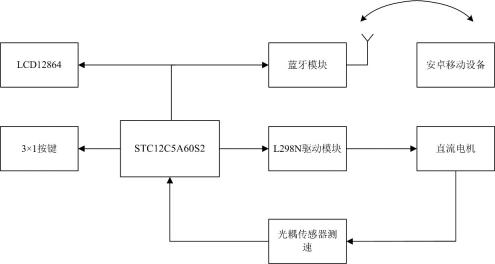
图2 系统硬件模块框图
剩余内容已隐藏,请支付后下载全文,论文总字数:16297字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

