论文总字数:22470字
目 录
1 绪论 1
1.1.引言 1
1.1.1 无人机的研究背景 1
1.1.2 四旋翼无人机简介 2
1.1.3四旋翼无人机的应用 2
1.1.4 四旋翼无人机技术 3
1.2 多旋翼无人机国内外研究现状 3
1.2.1 国外无人机研究现状 3
1.2.2 国内无人机研究现状 5
1.3.四旋翼无人机飞行控制方法概述 5
1.4.本文的主要研究内容 6
2.控制系统的结构及选型 6
2.1 四旋翼无人机的系统构成 7
2.2 控制系统硬件选型 7
2.2.1 陀螺仪加速度计选型 7
2.2.2 地磁计选型 8
2.2.3 处理器选型 9
2.2.4 电机部分 9
3 飞行原理及控制算法 10
3.1四轴飞行器飞行原理 10
3.2 PID控制 12
3.2.1 比例P控制 12
3.2.2 积分I控制 13
3.3.3 微分D控制 13
3.3 四元数与欧拉角 13
3.3.1 欧拉角解算 13
3.3.2 四元数解算 14
4 四旋翼无人机的建模 15
4.1 坐标系建立 15
4.2 姿态角建模 16
4.2.1 动力学结构 16
4.2.2平移运动系统分析 17
4.2.3旋转运动系统分析 19
3.4模型简化 22
3.4.1俯仰角、横滚角模型 23
5 控制器整体设计 24
5.1控制器设计 24
5.1.1PID控制器设计 25
5.1.2PID控制参考模型 25
5.2 控制器软件设计 27
5.2.1控制器脉冲输出 27
5.2.2 AD转换 28
5.2.3数据传输 28
6 实验结果与分析 29
6.1俯仰、滚转飞行实验 29
6.2偏航飞行实验 30
7 总结 31
7.1全文总结 31
7.2工作展望 31
参考文献 32
致谢 34
四轴飞行器姿态控制的设计与实现
吴昊阳
,China
Abstract: The attitude control study in autonomous flight aircraft has been very important, directly related to the stability of the aircraft, so the development of an outstanding performance of the attitude controller, is particularly important. Four-rotor UAV for the study, discusses its attitude control. In this paper, UAV flight principle, the attitude angle obtained in accordance with the principle of dynamics model. In the attitude angle speculation, mainly using Euler angles speculative attitude quaternion collect dead gesture. According to the overall structure of the aircraft, each module separately embedded system design and implementation. Finally, experimental verification flight attitude control flight control performance.
Keywords: four-rotor aircraft, attitude control, quaternion, Euler angles
1 绪论
绪论中主要介绍论文的选题背景,针对多旋翼无人机的应用、特点、关键技术作概述,介绍其领域国内外的研究热点,论述无人机的控制方法。
1.1.引言
近年来,关于多旋翼无人机的研究日趋增多,对其应用也逐渐从军事领域迈向民用领域。得益于飞行控制技术的不断创新,价格低廉的商用型无人机在市场上取得很大成功。四轴飞行器在军事和民用领域具有广阔的市场,尤其适合在近地面环境中执行勘测、侦查等任务。此外,无人机的自主飞行控制技术本身结合了智能识别、图像处理、无线通信、空气动力学以及现代控制理论等多个领域的知识,这些因素都促成了无人机成为世界范围内学者的研究热点。
1.1.1 无人机的研究背景
无人机是种由无线遥控设备或本身程序操控的飞行器。可以遥控或自主飞行,可以多次回收利用,而且可以带非杀伤性或杀伤性负载。无人机灵活性高、安全性能高、战场辐射大、执行任务方便和无人员伤亡等特点受到非常大的重视,世界上各个大国都在积极研制和装备无人机,还有别的经济条件较好的中小型国家也在开发或者收购无人机。特别是美国对微小型无人机的需求不断增加,希望可以在战争中发挥更大的作用。
与固定翼无人机相比,旋翼式无人机的速度较慢,续航能力弱,但其对起飞和降落的地面环境没有严格的要求,同时具有操作容易,活动环境多样,可定位悬停等特点。多旋翼无人机的设计需要复杂的传感器系统、快速响应的执行机构及更完善的控制算法,而以往这些都是阻碍旋翼式无人机发展的因素。21世纪以来,随着微电子技术的快速发展以及控制理论的不断成熟,上述问题得到很大程度的解决,因此,旋翼式无人机已经逐渐成为一个研究热点。
早期对旋翼式无人机的研究基本都是以单旋翼直升机作为研究对象进行的,直升机的机体结构复杂,制造和维修成本比较高,另外,复杂的传动系统加大了对机身的控制难度。在此情况下,多旋翼无人机应运而生。多轴飞行器机体结构直接,易于维修,同样大小的直升机相比,具有更强的抗风、抗干扰及负载能力。近年来,关于多旋翼无人机的研究日趋增多,对其应用也逐渐从军事领域迈向民用领域。得益于飞行控制技术的不断创新,价格低廉的商用型无人机在市场上取得很大成功,多旋翼无人机在民用市场上得到巨大发展。
1.1.2 四旋翼无人机简介
近些年来,旋翼无人机由于微电子技术的发展,也在不断的取得突破性进展。四轴是其中一个重要分支。
四轴飞行器是一种以四个螺旋桨带动机体运动,能够垂直起降的飞行器,一般分为十字型和叉子型,图 1.1 为一个典型的十字型四轴飞行器结构。
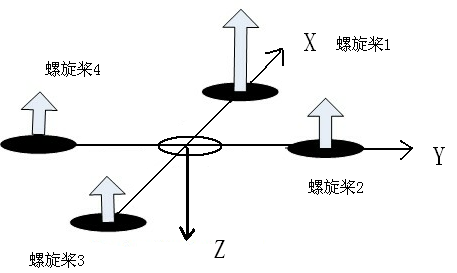
图 1.1 典型的十字四旋翼飞行器结构
四轴无人机还具有一下特点:
- 体积小、具有一定的隐蔽性,对起飞场地的要求不高。
- 飞行域灵活,可操控性强。四旋翼无人机的飞行高度域可以从地面到几百米,飞行速度可达每秒几十米,能飞到狭小空间内执行侦察任务,在复杂环境下使用很方便。
- 结构简单、拆卸方便且易于维护,经济性好,安全性好,可以提供实时的探测信息。
1.1.3四旋翼无人机的应用
近年来,关于四旋翼无人机的研究日趋增多,四旋翼无人机在越来越多的领域中得到了广泛的应用,对其应用也逐渐从军事领域迈向民用领域。得益于飞行控制技术的不断创新,价格低廉的商用型无人机在市场上取得很大成功,四旋翼无人机在民用市场上得到巨大发展。它可以装载通信与摄像设备和各种分析取样仪,并能够进行自主导航飞行,完成预先设定的任务。其具体应用体现在如下方面:
- 政府机构:交通巡逻、火场指挥、抢险救灾、治安监控、气象勘测、核辐射探测、灾情监视;
- 媒体机构:新闻素材搜集、航空摄影;
- 科研机构:地址调查、环境评估、航空探矿、空中考古、野生动物摄影;
- 企业机构:管线巡检、房地产管理、;
- 个人应用:遥控飞行、空中摄影、物品运输、农业服务;
1.1.4 四旋翼无人机技术
四旋翼无人机能够垂直起降,无论是能动性还是可操作性都很强,便于操作员操控。飞行器可以飞到更靠近目标的区域,因此发展空间巨大,但要充分发挥四旋翼无人机的优势,还面临许多难题。四旋翼无人机主要有三个技术难题。
- 四轴飞行器重量轻,很容易受到气流等外部因素的干扰,从而影响传感器姿态解算和模型实时性,并最终对飞行器性能产生影响。
- 四轴飞行器是欠驱动系统,必须通过唯一动力的变化来调整飞行姿态。
- 利用陀螺仪进行飞行器姿态解算需要积分以便于误差,而这个误差积分的速度也是很重要的。这些都使得姿态控制器设计变得非常困难,对实现自主飞行也是一个挑战。
1.2 多旋翼无人机国内外研究现状
近年来,随着微小型无人机应用范围的日益扩大,针对其飞行控制系统的研究越来越热。新的控制算法不断出现。对无人机的应用需求越来越广,使得这一领域成为了当前的研究热点。
1.2.1 国外无人机研究现状
作为研究热点,多旋翼无人机已经受到越来越多的国外高校的关注,参与研究的主要有日本千叶大学(CHIBA University)、美国麻省理工大学(Massachusetts Institute of Technology,MIT)、宾西法尼亚大学(The Pennsylvania State University)、斯坦福大学(Stanford University)等。
(1)麻省理工大学:主要是在建模与控制还有智能识别方面做了研究,以实现高精度的模式识别功能,如图1.2。

图1.2 麻省理工无人机实验平台
(2)斯坦福大学:主要研发了STARMAC系列无人机,图1.2展示了STARMACⅡ,其机身为自主设计,采用上下层结构,最大载重1千克。上层控制系统采用PC和单片机相结合,下层传感器控制系统搭载了IMU,GPS及声纳等模块,且可与地面站系统进行无线通信。斯塔服大学无人机如图1.3所示:

图1.3 斯坦福大学STARMACⅡ无人机
(3)宾夕法尼亚大学:宾夕法尼亚大学的无人机机体采用的是Ascending公司的产品,机身搭载室内毫米级视觉定位系统。地面站系统得到飞行器的位置和姿态信息后,产生控制命令并发送给无人机,完成飞行控制。其负载能力较弱,可搭载0.2kg的物品。其实验平台如图1.4所示:

图1.4 宾夕法尼亚大学无人机实验平台
剩余内容已隐藏,请支付后下载全文,论文总字数:22470字
相关图片展示:




该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

