论文总字数:20167字
摘 要
随着社会的进步与科学技术的不断发展,检测设备向高档化发展,不仅精度高,功能强,而且自动化方面的要求愈来愈高。在数字控制系统中,步进电机属于执行元件,同时也在各种自动化控制、机械系统等领域有着广泛应用。其最大特点是,它是根据输入脉冲信号来进行转动的,也就是输入脉冲数量决定了电机的总转动角度,而输入脉冲信号频率决定了步进电机电机的转速,因此单片机适用于控制步进电机。
在位置、速度等开环控制系统中, 为了提高步进电机控制系统的整体性能, 最有效的方法是利用转矩来进行反馈控制,即利用位置传感器测量出电机的位置、速度,再传输给控制器,改变PWM输出,来控制电机运行。
所以本设计,通过对步进电机各种运行控制方式的研究,完成了整个控制系统的硬件电路设计与制造,使用软件编译实现系统控制,进一步提高了微控制器的运行速度,从而提高了整个系统的响应速度,使其达到提高系统定位精度,减少响应时间,减小整体体积的目标,并利用闭环控制,进一步实现精确控制,对改进数控机床的加工精度和现代医学检验技术具有重大意义。
关键词:自动控制系统、步进电机、STM32单片机、位置传感器。
A DESIGN OF STEPPER MOTOR MONITORING AND CONTROL DEVICES BASED ON STM32 MICROCONTROLLER
Abstract
With the continuous development of science and technology and social progress, gentrification development of testing equipment is not only high precision, strong functions, but also increasingly high requirements of automation . As a digital control system actuators, stepper motor are widely used in various automation control systems , precision machinery and so on. Its greatest feature is that it is controlled by the input pulse signal. In other words, the total rotation angle of the motor is determined by the input pulses and the motor speed is determined by the frequency of pulse signal. so it is suitable for micro-controller.
In order to improve the operational performance of the stepper motor system in the position (or velocity) open loop control applications, the implementation of the torque feedback control is an effective method. Position sensors measure the position(or speed) of the motor and then transfer to the controller to change the PWM output to control the motor operation.
So the design is to make stepper motor completing various operating modes. Stepper motor can complete reversible control, speed control and other functions under the four-shot work and eight-shot work via STM32 MCU. CPU can be further increase speed, thereby improving the response speed of the system and achieve the target to improve the positioning accuracy, reduce response time and reduce the overall volume. And the use of closed-loop control is further to achieve precise control. It is of great significance to improve the precision CNC machine tools and modern medical laboratory technology.
KEYWORDS: Automation Control System, Stepper Motor, STM32 MCU, Position Sensors.
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 步进电机控制系统 1
1.1.1 电子电路控制系统 1
1.1.2 PLC控制系统 1
1.1.3 单片机控制系统 2
1.2 本论文的研究目的和内容 2
1.2.1 研究目的 2
1.2.2 研究内容 2
1.3 论文各部分内容概述 2
第2章 步进电机概述 4
2.1 步进电机及其发展 4
2.2 步进电机的种类 4
2.3 步进电机的基本参数 4
2.3.1 步距角 4
2.3.2 矩角特性 5
2.3.3 频率 5
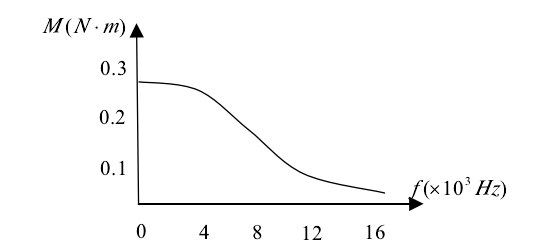
2.3.4 运行转矩特性 5
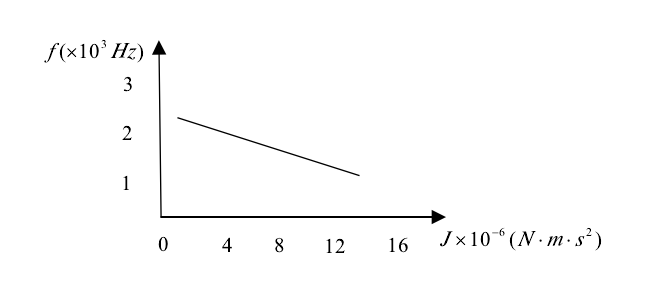
2.3.5 惯频特性 6
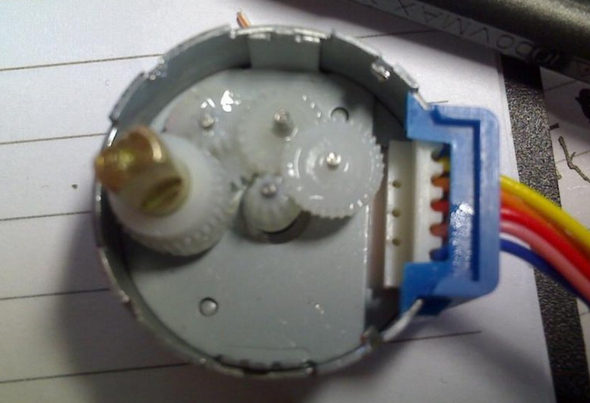
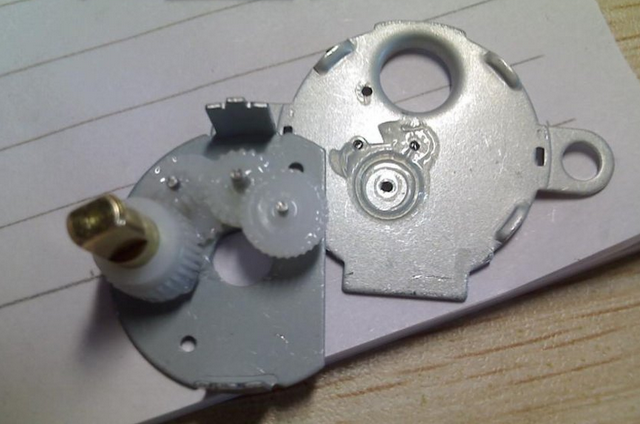
2.4 四相五线减速步进电机工作原理 7
2.5 驱动电路 9
第3章 步进电机控制技术 10
3.1 开环控制系统 10
3.2 闭环控制系统 11
3.3 半闭环控制系统 11
3.4 细分驱动控制 11
第4章 系统硬件设计与实现 13
4.1 系统整体硬件构架 13
4.2 控制器模块 13
4.2.1 单片机概述 13
4.2.2 STM32单片机 13
4.2.3 STM32最小系统设计 14
4.3 驱动模块 16
4.3.1 ULN2003概述 16
4.3.2 驱动电路 17
4.4 位置传感器模块 18
4.5 显示模块 18
4.6 通信模块 19
4.7 系统电路设计与绘制 20
第5章 系统软件设计与实现 23
5.1 系统整体软件设计 23
5.1.1 软件编译环境 23
5.1.2 系统主程序设计 25
5.2 软件功能需求实现 27
5.2.1 PWM控制 27
5.2.2 ADC检测 30
第6章 总结与展望 32
参考文献 33
致谢 34
绪论
步进电机控制系统
电子电路控制系统
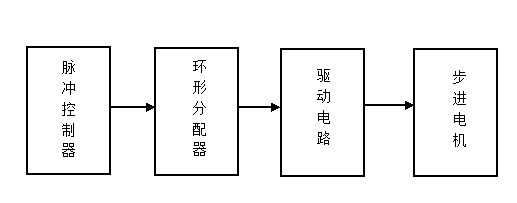
电子电路控制系统是指利用电子元件构成步进电机整体的控制电路。首先步进电机脉冲控制器发出脉冲信号,然后通过环形分配器,将信号转换成符合电机运行要求的脉冲控制信号,但是控制信号不能直接与步进电机相连,其功率不足以直接驱动步进电机,因此在这两部分之间应加入一个驱动电路,将控制脉冲信号放大,最终构成完整的步进电机控制系统。这种控制系统具有简单,便宜,可实现细分控制。这个系统主要由三部分构成:脉冲信号产生电路、脉冲信号分配电路、功率放大驱动电路[1]。系统构成如图1-1所示。
电子电路控制系统
PLC控制系统
PLC控制系统的核心是PLC(即可编程控制器),有着配套硬件齐全和通用性强等一系列优点,在工业领域被广泛运用于各种控制系统中。在步进电机控制系统中,PLC的作用是脉冲控制器,但与电子电路中的脉冲控制器相比,PLC可进行软件编程。通过软件编程,PLC输出的脉冲控制信号可随程序进行实时的改变,改变控制信号的频率和脉冲数量,就能对步进电机的转动距离和转动速度进行相应的控制。PLC输出的脉冲控制信号由脉冲分配器根据电机运行方式进行处理和分配到相应的电机绕组上。PLC控制系统中的脉冲分配器可以是硬件电路,也可以是软件编程,其各有利弊,硬件节省PLC资源,但是电路结构比较复杂;软件则无电路结构,但是占用PLC。所以如何选择应由实际工程情况而决定。步进电机功率驱动电路将PLC输出的控制脉冲放大,达到比较大的驱动能力,来驱动步进电机[3]。
单片机控制系统
单片机控制系统的控制核心是单片机,可以将部分硬件电路的功能以软件编程来实现,省去了一些硬件电路的设计,可将脉冲控制器与环形分配器的作用都用软件编程技术来实现。这样就可以避免由硬件电路设计与制造中所引起的误差,使得整个步进电机控制系统的性能更好。同时由于单片机的可设计性较高,整个控制系统可实现更多实用的功能,可对步进电机的外围电路进行设计,将键盘设为外部中断源,从而设置了步进电机启停、正反转、加减速、定位等功能,综合运用中断、查询等方式来调用中断服务程序,实现对步进电机的最佳控制,在显示器上能够显示正反转、速度等信息[2]。
本论文的研究目的和内容
研究目的
随着微控制器技术的迅猛发展,单片机的性价比愈来愈高,使用单片机来控制电机将会成为一种趋势。同时作为离散型自动化控制的执行元件,步进电机将电脉冲信号转换成相应角位移或线位移,从而来实现自身的运转。
所以通过此课题来设计出一套硬件结构较为简单,经济,但功能完善,可操作性,交互性好,安全可靠的步进电机控制系统。
研究内容
本课题中设计了基于STM32单片机的步进电机测控装置。整个任务包括:
( 1 ) 进行单片机程序设计,实现步进电机的驱动控制。
主要是PWM波输出的设计,实现电机的正反转,加减速。
( 2 ) 进行传感器的设计,实现反馈控制。
主要是位置传感器的测量和传输,通过STM32单片机自带的ADC功能,对采集到的电压模拟量进行处理、反馈。
( 3 ) 进行人机界面的设计,实现与单片机通信连接。
主要是利用485通信,来通过上位机控制步进电机的运行,以及运行状态的显示。
论文各部分内容概述
第一章:介绍了步进电机在国内外的研究现状,说明了使用STM32单片机来控制步进电机的缘由,阐述了本文的研究目的和内容。
第二章:介绍了步进电机及其发展,电机种类,基本参数和特点,还详细说明了四相五线减速步进电机的基本构造和不同通电方式。
第三章:介绍了步进电机的控制技术,详细阐述了开环控制、闭环控制和半闭环控制这三种控制系统。
第四章:介绍了本设计的系统硬件的整体构成,主要分为控制模块,驱动模块,传感器模块和显示模块,并一一进行说明设计方案。
第五章:介绍了本设计的系统软件的整体构成,主程序及各部分的基本流程,并重点说明了PWM控制与ADC检测这两部分程序的设计思路。
第六章:总结了本设计的软硬件需求和所实现的功能,并对步进电机测控装置进行了展望。
步进电机概述
步进电机及其发展
步进电机是电动机的基本类型之一,与直流电机、异步电机等最大的区别是步进电机的转动由驱动器所接收到的脉冲信号控制的,是一步一步地运转的。控制信号的频率和脉冲数量,就决定了步进电机的转动距离和转动速度,所以控制脉冲就能控制步进电机,完成电机系统所需求的位置与速度控制。步进电机可以作为一种控制用的特种电机, 利用其没有积累误差(精度为100%)的特点, 广泛应用于各种开环控制。[4]
最初的步进电机出现于19年纪中前期,以电磁铁之间的相互作用为动力。19年纪中后期,人们开始对步进电机产生了很高的研究兴趣,慢慢开始掌握了步进电机的控制技术。此后,步进电机开始被广泛地运用于一些控制系统中。很快,在一些其他领域的独立系统中(例如轮船、飞机)也开始使用了步进电机。
从1960年以后,人们发现了永磁铁,并利用永磁铁与电磁铁之间的相互作用发明了更多新型步进电机,这是步进电机发展史上的一大进步,而步进电机发展史上另一项大进步发展是有半导体技术所引起的。步进电机相关技术不断发展起来,使得步进电机成为了电动机的一种基本类型,并且运用于各领域。
1950年后期,我国也开始了步进电机的研究与制造。在那之后的十几年里,主要是相关科研单位为了研究某些装置而使用或开发了少量的产品,这些产品主要是运用多段结构三相反应式步进电机[5]。
步进电机的种类
比较常见的步进电机种类包括三种:永磁式步进电机(Permanent Magnet, 简称PM)、反应式步进电机(Variable Reluctance, 简称VR)、混合式步进电机(Hybrid,简称 HB)和单相式步进电机等[6]。目前使用最为广泛的是混合式步进电机。
步进电机的基本参数
步距角
步距角指的是当电机驱动器每接受到一个脉冲控制信号,电机转子所转动过的角度。

公式中: ——转子次数;
——转子次数;
 ——运行拍数,等于相数或其整数倍,即
——运行拍数,等于相数或其整数倍,即 ;
;
剩余内容已隐藏,请支付后下载全文,论文总字数:20167字
相关图片展示: