论文总字数:12475字
目 录
1.引言.......................................................4
2.卡尔曼滤波原理.............................................4
2.1 Bayes基本观点...............................................................4
2.2.卡尔曼滤波基本原理..........................................................5
3.卡尔曼滤波的应用............................................9
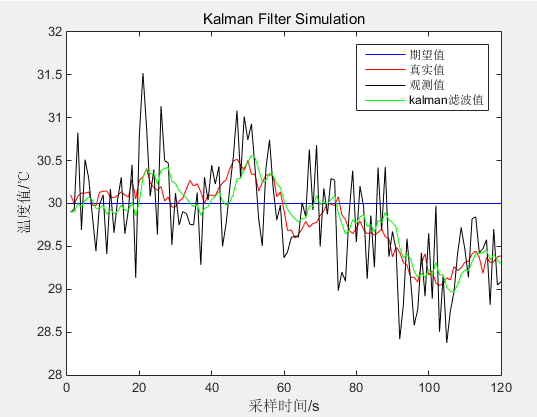
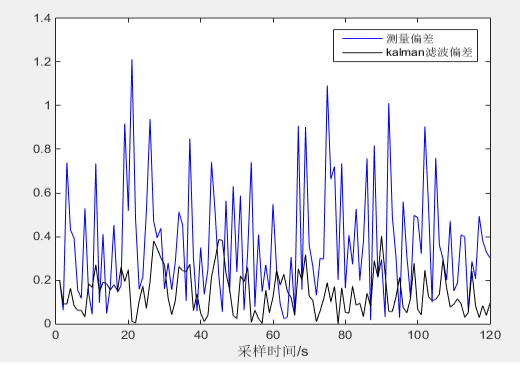
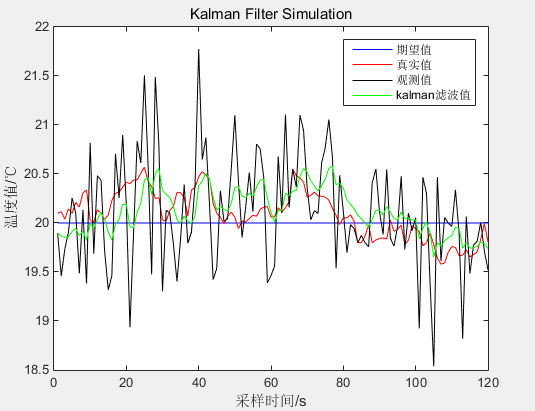
3.1 温度测量....................................................................9
3.2自由落体目标跟踪............................................................12
3.3 船舶GPS导航定位............................................................16
- 结束语.................................................19 参考文献.....................................................19致谢.........................................................21
卡尔曼滤波及其应用
徐鹏
, China
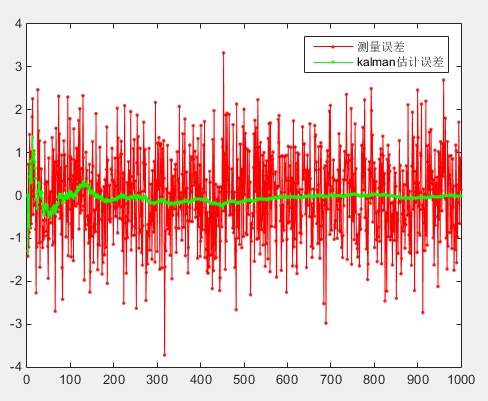
Abstract:The nature of data filtering is a data processing technique that maximizes the removal of various noise to approximate the final data, and Kalman filtering is a weapon for noise processing. In this paper, the principle of Kalman filter is introduced, and the application of the method in room temperature measurement, free fall target tracking, ship GPS navigation and positioning is introduced. The results show that the measurement error is much higher than the Kalman filter error. Therefore, Kalman filter has a very significant effect in dealing with noise and reducing the error between the measured result and the real value.
Key words:Kalman filter; noise; measurement error; Kalman filter error;
窗体底端
- 引言
什么是滤波?滤波这个词汇发源于通信理论这一学科,它是把接受信号中的无用部分剔除而保留有用信号的处理技术。在更加广泛的层面来说,滤波的原理是使用特定的手段抑制无用信号,增强有用信号的数字处理过程。
无用信号,也叫噪声,是指观测数据对系统没有贡献或者起干扰信号的作用的信号。在通信中。无用信号表现为特定波段频率、杂波;在传感器数据测量中,无用信号表现为幅度干扰。例如,在温度测量中,传感器测量值与真实温度之间往往有一定的随机波动,这个波动就是随机干扰。其实噪声是一个不确定的非平稳的过程,它的函数的函数图像趋势不同说明了噪声的性质也有所不同。如果这些干扰信号幅度分布是标准的高斯分布(即正态分布),那么我们就把这种信号叫做高斯白噪声。而大多数传感器所具有的一种测量噪声就是高斯白噪声,只要是传感器采集和测量的数据,都携带噪声干扰。这种影响有的很微小,有的则会是信号变形、失真,有的严重导致数据不可用。那么滤波也不是万能的,滤波只能最大限度降低噪声的干扰,即有的滤波是不能完全消除噪声,有的则可能完全消除。
滤波这一理论即不仅要对系统中可观测信号做到精确测量,同时还要考虑滤波自身一定的准则,最终选取合适的统计方法,对所要检测的系统进行全面估计。只有当滤波或估计的方差达到最小值时,我们才能将它们称为最优滤波或最优估计,即要求真实值和估计值之间的误差的方差最小。
当今时代是一个信息时代,信息融合和网络也有其他的许多优点,它们和卡尔曼滤波的结合在控制和估计领域内也同样是一个重要的发展方向。
一般地,只要跟时间序列和噪声呈现正态分布有关或者能建立类似的模型的系统,就可以利用卡尔曼滤波来处理噪声问题。所以卡尔曼滤波绝不仅仅被局限在工程领域,在导航制导、目标定位和跟踪领域、通信技术和数字图像处理技术领域、天气预报和地震预报领域、地质勘探和矿物开采领域、证券股票市场预测领域等,它的作用都非常亮眼。
2、卡尔曼滤波原理
2.1 Bayes公式
Bayes分析方法的特点是:多数事件具有不确定性(方程或公式难以具体描述),概率则可以将这种不确定性具体阐述,概率规则则用来实现在此之中其它形式的推理。
Bayes这个学派最初只有两项工作:Bayes定理和Bayes假设。
将时间的先验概率和后验概率相结合是Bayes定理的核心观点。
一般处理现实问题我们都会有“经验”这一因素,但是当没有任何过往的的经验来协助我们确定π(θ)的时候 ,Bayes定理考虑到这一问题而提出可以先使用均匀分布作为其分布,即参数事件规定的范围内取得所有取值的机会是一样的,那么这样的假设我们就称为Bayes假设。
先验分布与后验分布是Bayes统计中两个基本概念。
先验分布: 即在时间样本抽样之前,相关参数的概率就已经存在,在任何时候根据样本信息进行推断时,我们就需要自行定义先验分布。它不一定是有客观依据存在的,有可能存在部分甚至是完全的主观想法。
后验分布:任何一个事件都是具有一定“特点”的,这个特点就是指它的参数和根据先验信息确定的分布,运用统计学中条件概率的思想求出未知参数θ的条件概率分布。由于这个分布子还能在样本抽样之后才能得出,所以我们称之为后验分布。它只会对下一步的推断产生影响,而与样本自身的样本分布无关了。
下面我们要介绍的卡尔曼滤波的原理就和Bayes公式的核心思想非常类似。
2.2 卡尔曼滤波基本原理
我们用线性微分方程来描述一离散系统的过程:
 (1)
(1)
定义观测变量z则得到观测方程:
 (2)
(2)
这里我们定义两个相互独立并且正态分布的信号,其中wk 表示过程噪声,vk 表示观测噪声:
 (3)
(3)
 (4)
(4)
但是在实际的系统里面,经过多次迭代计算,并没有办法保证过程噪声的协方差矩阵Q和观测噪声的协方差矩阵R的值和它在初始状态下的一些特点始终保持恒定不变,但是为了说理的方便,这里我们假定它们都是不变的。
方程(1)中的矩阵A是n阶方阵,它的作用是将时间(k-1)的各参量线性映射至当前状态(k)时间下,当且仅当 =0或者
=0或者 =0。但是在不同的条件下,A的值可能因时间而发生变化,这里我们假设它是不变的。n*l矩阵B则是输入u的卡尔曼增益。而状态变量
=0。但是在不同的条件下,A的值可能因时间而发生变化,这里我们假设它是不变的。n*l矩阵B则是输入u的卡尔曼增益。而状态变量 对观测变量
对观测变量 的增益我们用方程(2)中的H表示(H是m*n阶的),这里的H在实际系统下的情况同A是一样的,所以我们作同A一样的处理。
的增益我们用方程(2)中的H表示(H是m*n阶的),这里的H在实际系统下的情况同A是一样的,所以我们作同A一样的处理。
定义 (实数域内的n阶方阵),这里
(实数域内的n阶方阵),这里  代表的意义是估计,− 代表的意义是它是先验信息,它表示在我们已经知道k 时刻以前状态条件下,对k时刻的状态作出的先验状态估计。规定
代表的意义是估计,− 代表的意义是它是先验信息,它表示在我们已经知道k 时刻以前状态条件下,对k时刻的状态作出的先验状态估计。规定 表示当测量变量zk的值已知时,对k时刻下的状态做出后验状态估计。而这个过程也必然存在先验或者后验上的估计误差:
表示当测量变量zk的值已知时,对k时刻下的状态做出后验状态估计。而这个过程也必然存在先验或者后验上的估计误差:

先验估计误差的协方差为:
 (5)
(5)
后验估计误差的协方差为:
 (6)
(6)
下一式(7)表现的是卡尔曼滤波器的表达式:我们将测量变量zk进行加权处理之后,和它的预测 之差以及先验估计
之差以及先验估计 的线性组合式,这就是我们对后验状态估计
的线性组合式,这就是我们对后验状态估计 的定义。
的定义。
剩余内容已隐藏,请支付后下载全文,论文总字数:12475字
相关图片展示: