论文总字数:24215字
摘 要
我们把能够实现微小位移的运动机构称为微位移机构,在实验力学中,存在着重要的地位,比如微小位移的发生与控制、微小载荷的施加等。在这个纳米技术飞速发展的时代,微位移精度的控制也是一项关键性的技术。精密仪器的定位或是对准都离不开这项技术,微位移技术也是影响着国家加工技术水平的高低,致力发展这项技术是非常重要的。本次采用的螺旋式位移机构精度高,达到微米级,而且制造方便,在实验力学中得到广泛应用。
本次毕业设计课题针对微位移的控制实现选取了采用步进电机控制法。为了实现对微位移的控制,就必须对步进电机驱动进行研究,需要掌握步进电机驱动原理,以及在PC平台上如何做到通过串口通信控制步进电机驱动器进而做到精确控制步进电机转动,通过控制步进电机的转动传送到精密模组上,将螺旋传动转换为微小直线位移,达到实现微位移控制的目的。在实验力学中能够发挥其控制微位移控制发生以及微小载荷施加的作用。
通过本次设计,对于各种微位移精度理论上均可以实现,最高程度可以达到纳米级别,也可以根据实际情况来定制所需求精度,提高了通用性。
关键词:微位移 实验力学 步进电机 编程
To achieve the drive and control of micro-displacement
Abstract
We can achieve little displacement movement mechanism known as micro-displacement mechanism.In experimental mechanics, there is an important role, such as the occurrence of control, applied and other minor displacement and small loads.In this age of rapid development of nanotechnology, micro-displacement accuracy control is also a key technology.The spiraling use of high-precision displacement mechanism, to micron level, and ease of manufacture,. It can be widely applied.in the life.
The graduation project for the realization of micro displacement control is selected by a stepping motor control method.In order to achieve the micro displacement control.We must study the stepper motor,and the principle of stepper motor driver need to know. And how to do it on the PC platform via serial communication to control stepper motor drives further achieve precise control of stepper motor rotation.By controlling the stepper motor rotation is transmitted to the precision modules.The screw drive is converted to tiny linear displacement, to achieve micro-displacement control purposes.In experimental mechanics can play its controlling micro displacement control occurs and the role of small load is applied.
Over this design, for a variety of micro-displacement accuracy theoretically may be implemented.You can reach the highest level of nanometer level.It also can be customized according to the actual situation demanded accuracy and improve the versatility.
Keywords: micro-displacement Experimental Mechanics stepper motor programming
目录
摘 要 I
Abstract II
第一章 绪论 1
1.1 引言 1
1.2 微位移技术与步进电机的发展现状及应用 1
1.2.1 微位移技术发展现状及应用 1
1.2.2步进电机发展概况与趋势 3
1.3 选题设计目的及内容 4
第二章 实验概述及原理 5
2.1 步进电机及驱动器概述 5
2.2 步进电机特性及优缺点 5
2.3 步进电机种类 6
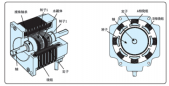
2.4 所选步进电机及其控制原理 7
2.5 微位移机构 9
第三章 实验方案 10
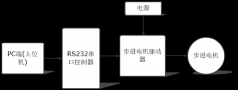
3.1实验系统组成 10
3.2各部分主要设备 10
3.2.1 步进电机驱动器 10
3.2.1.1 YK2405MA细分驱动器的特点: 10
3.2.1.2 指示灯及引脚功能说明 11
3.2.2 JMDM-20DIOV2串口控制器 12
3.2.3 DC双路变压直流电源 13
3.2.4 串行口模块 13
3.2.5 KK40精密模组 13
3.3 实验内容 13
3.3.1 步进电机控制程序设计方案 13
3.3.1.1 通过VB建立建立可视化界面 14
3.3.1.2 向各部分控件中插入源代码 15
3.3.1.3 程序调试 18
3.3.2 系统调试 19
3.3.3 微位移控制的实现 20
第四章 总结与展望 21
4.1 总结 21
4.2 展望 21
致谢 22
参考文献 23
附录 24
第一章 绪论
1.1 引言
生活在21世纪的我们,无不体验着科技发展带来的便利,微位移技术也随之发展越来越迅速,成为当代科技中不可或缺的一项。在实验力学中,存在着重要的地位,比如微小位移的发生与控制、微小载荷的施加等。在薄膜力学性能测试中也利用到了微小位移测量方法。微位移技术体现在生活的各方各面,促进了集成电路设计、生物材料工程、精密仪器加工等学科的发展。伴随着纳米技术的飞速发展,微位移精度的控制也是一项关键性的技术。精密仪器的定位或是对准都离不开这项技术,微位移技术的高低也影响着整个加工行业的技术水平,大力发展微位移技术是十分有必要的。
本次毕业设计课题针对微位移的控制实现选取了采用步进电机控制法。在当下,由于步进电机在各个领域各个方面都存在应用,所以对它的需求量与日俱增。这是一种用于简易控制的电机,因为具有结构简单、运行稳定、易于控制等特点,使得在各行各业受到广泛欢迎以及使用。步进电机的步距值不受外界因素的变化的影响,如电压、温度等;误差也不会随着时间而积累,在实际生活应用方面带来了许多意想不到的方便。步进电机应用十分广泛,如市场消费产品(电子时钟、照相设备等)、工业器械(数控机床、人工智能仪器)、甚至在医疗设备等机械设备中,也有它的身影。由此可见,如何正确使用和操控步进电机在实际生活当中起到了非常重要的作用。在这里,本次选题设计了一段上位机驱动程序,通过串口通信可以实现对电机速度,方向,加速度等一系列参数的设定,进而做到微位移的驱动与控制的实现。
不管是用线纹尺还是用光学仪器来测量位移量都是比较传统的位移检测方法,也有用电容传感器和由单片机组成的位移测量系统测量微位移,前者的最大缺陷是测量误差比较大 ,效率比较低;后者却因为采用了电容传感器使得测量精度有了提高, 但这种方法却对外在环境有着较高的要求,如环境温度、湿度等。而此次设计内容采用了Visual Basic语言编程,针对串口通信控件所设计,利用串口控制器控制电机驱动器,进而实现微位移的发生,达到后续实验力学中的要求。
1.2 微位移技术与步进电机的发展现状及应用
1.2.1 微位移技术发展现状及应用
通常能够产生工作位移小于毫米级的机构被称为微位移机构,这些年来,随着技术的进步以及人们在微位移技术上的研究,研发了许多能够实现的微位移机构。下面陈列一些主要的微位移机构:
- 蠕动式微进给位移机构
蠕动氏原理由一根主轴、两个夹紧盘,还有一个由各种不同材料来确定的伸缩元件组成,伸缩元件主要是用来连接两个夹紧盘的。靠主轴或者夹紧盘与伸缩元件的组合体来实现运动。这种方法产生的行程大,步进距离也可以确定,比较灵活。在当下,蠕动式微进给位移主要应用于驱动力较小场合,如光学调整、集成电路制造、X光刻等。[[1]]

- 超磁致伸缩材料微位移机构
在磁场的作用下,超磁致伸缩材料能够产生磁致伸缩效应,构成的驱动器原理简单,而且在使用中具有位移大,漂移小,输出力大等优点。如图1.1所示,受到磁场作用的影响,材料的长度会出现伸长或缩短的现象。 图1.1超磁致伸缩材料微位移机构
有公式为 ,其中
,其中 为磁致伸缩应变,用来描述磁致伸缩量的大小。材料的
为磁致伸缩应变,用来描述磁致伸缩量的大小。材料的
磁致伸缩应变随磁场强度的增加而增加, 当保持不变的时候,此时磁场强度到达一个临界值,称之为到达饱和磁致伸缩应变。
与之类似的还有热变形式微位移机构,区别是一个通过热变形引起材料的长度变化,另一个通过磁作用。但是热变形式位移机构有热惯性存在,故不适合变化频率较高的微位移场合。[[2]]
- 形状记忆合金薄膜微致动
在当前研究当中,大部分微驱动材料功密度普遍不高,这就导致在微机电系统(MEMS)的研究出现瓶颈。而形状记忆合金(SMA)薄膜的出现,很好的解决了这一问题。它具有很大发展潜力,并且其功率密度高大、输出力高、而且位移大。比如镍钛形状记忆合金等在研制微型驱动器方面具有精确度高、效率高等优点。如图1.2所示,在初始温度T下,记忆合金具有恢复原状的能力。当合金处于正常室温时,悬臂梁保持直的状态。而当它被加热到一定温度T时,合金“记忆”就将被唤醒并试图恢复最开始弯曲的形状。[[3]]

图1.2 形状记忆合金致动示意图
- 压电陶瓷驱动的柔性铰链机构
近些年来发展起来很多新型微位移构件,其中压电陶瓷微位移器件是比较热门的一款。这款器件不仅具有体积小、分辨率高、输出力度大和频响高的优点,而且在使用上也是易于控制,不发热、无噪声,是近乎于理想的微位移器件。通过采用一种新型的弹性导轨形式———柔性铰链,能够有效使得压电、电致伸缩微位移器件实现纳米分辨力定位。柔性铰链结构较为简单、不存在机械摩擦与间隙间隙、运动灵敏度较高、在加工方面易于操作。

通常情况下压电元件的位移行程在10微米左右,行程较小,连大多数的驱动要求基本都达不到,如图1.3所示,人们利用杠杆放大机构来对目标行程进行放大以此来获得较大的位移,如果觉得放大倍数未达到要求,则可以选取多级放大方法。[[4]] 图1.3 柔性铰链杠杆放大机构示意图
压电陶瓷的柔性铰链机构具有很多优点,在各个领域如航天航空、精密测量、微电子以及生物工程领域都能够起到很大作用。
- 机械传动式位移机构
机械传动式位移机构是生活中最常见的一种机构,也是本次选题采用的一种机构。其结构形式有很多种:杠杆传动机构,螺旋传动机构、楔块凸轮传动机构以及它们的组合机构等。
本次选题采用螺旋式位移机构,它的结构十分简单,主要利用步进电机的螺旋传动来获得微小直线位移,通过螺杆将步进电机的螺旋运动转化为直线运动。通过公式可得到螺杆直线位移s与步进电机转角 的关系:
的关系: 。其中
。其中 为螺杆螺距。[[5]]
为螺杆螺距。[[5]]
本次采用的螺旋式位移机构精度高,达到微米级,而且制造方便,在生活中可以得到广泛应用。
剩余内容已隐藏,请支付后下载全文,论文总字数:24215字
相关图片展示: