论文总字数:18665字
目 录
1绪论 1
1.1引言 1
1.2研究背景 1
1.3国内外研究现状 2
1.4本文研究内容与技术路线 2
1.4.1本文的研究内容 2
1.4.2本文的技术路线 2
1.4.3本文的研究目标 3
2三维激光扫描 4
2.1三维激光扫描的定义 4
2.2三维激光扫描的原理 4
2.3三维激光扫描的应用 5
3高铁零件点云CAD模型重建 7
3.1 Geomagic Studio软件简介 7
3.2点云预处理阶段 7
3.2.1数据对齐 8
3.2.2去除噪声 9
3.3多边形阶段 10
3.4曲面重建阶段 11
4高铁零件Geomagic Qualify中误差检测 12
4.1 Geomagic Qualify软件简介 12
4.2曲面匹配技术的研究 12
4.2.1曲面匹配方法 12
4.2.2 Geomagic Qualify中的曲面匹配方法 13
4.3 Geomagic Qualify中高铁零件误差检测 13
4.4高铁零件误差检测分析 15
5高铁零件尺寸检测程序设计 16
5.1检测程序设计需求与目标 16
5.2边缘检测算法 16
5.3程序设计开发与测试分析 16
5.3.1用户界面设计 17
5.3.2编写程序代码 17
5.3.3软件测试 18
6检测误差分析 19
6.1 Geomagic Qualify中数据分析 19
6.2 检测程序数据分析 22
7总结与展望 23
附录 25
致谢 28
基于三维激光扫描的高铁零件尺寸
检测方法研究与软件实现
恽培伦
,China
Abstract: Because High-speed railway is special,it must have a very high accuracy. The traditional manual measuring method do not meet the increasing demand. It has become a serious problem that how to detect high-speed railway components simply, rapidly and precisely. Using three-dimensional laser scanning technology can quickly obtain the three-dimensional point cloud model of the component, compared to the reference model can detect digitally and automatically. In this paper, Use camera 3D laser scanner to obtain the point cloud model of the component, then use geomagic software modeling, testing, completion of detecting a single part. Design a simple program to detect length with C # language. Finally, it is proved feasiblly after analyzing data. It is meaningful for the digital and automatic component detection.
Key words: 3D Laser Scanning; Geomagic ; Quality Check; Error Analysis;Software Implementation
1绪论
1.1引言
改革开放以来,我国经济持续快速发展,综合国力不断增强,铁路事业迎来了前所未有的发展机遇。京沪高铁、沪昆高铁等高铁的开通运营,使中国全面进入“高铁时代”,让世人对中国的高铁另眼相看。目前中国高铁运营里程已经超过1.9万公里, 总里程达到了世界第一,成为了世界上高速铁路发展最快、规模最大的国家。
我国高速铁路的蓬勃发展使得“中国高铁”品牌被更多人所知,更多的国家开始考虑接受我国高铁建设。当今社会,经济全球化程度越来越高,高铁走出去战略显得尤为必要。既是继续秉承对外开放的基本国策,也是推动世界高铁的发展与进步的必然要求。
高铁由于其特殊性,对安全性能要求极高。这也意味着高铁每一个零件都必须符合设计要求,必须把误差控制在一个合理的范围内。在传统机械工业生产中,人工利用专用检验工具检测被当作主要的检测手段。这种方法不但费时费力,而且不能保证精确度。对于零件结构复杂,精度要求高的高铁零件来说,必然是不适合的,大家都在寻求用最便捷的方式完成检测任务的方法。
三维激光扫描技术是测绘学科中的一门全新技术,是继GPS以来在测绘领域的又一次新的技术革命。三维激光扫描技术又称之为“实景复制技术”,可以在很短的时间内获得足够多的点云,由这些点云可以生成原始物体形状,构建可以供电脑处理的三维模型。将三维激光扫描技术应用到零件检测中,必定使检测技术进入新的发展阶段。
1.2研究背景
工业测量是在工业生产和科研各环节中,为产品的设计、模拟、测量、放样、仿制、仿真、产品质量控制、产品运动状态,提供测量技术支撑的一门学科。其目的是根据设计图纸和规范要求,高精度地对工业零部件进行检查、检测、调整、装配和维护。
逆向工程又称为反求工程,即在没有产品图纸及数据的情况下,通过三维扫描仪或者其他测量方法下,得到产品的三维模型,从而得以复制该产品。将逆向工程前期得到的三维模型与产品标准三维模型进行匹配、对齐,就可以实现产品的三维检测。
1.3国内外研究现状
目前,美国、瑞士、奥地利等国的数十家公司在三维激光扫描领域有了一定程度的研究,形成了一定的规模,其产品的精度和操作性达到了很高的水平。例如美国Trimble公司的GX、FX三维激光扫描仪、瑞士Leica公司的HDS6000激光扫描仪、奥地利Riegl公司的LMS360激光扫描仪。对于采集的数据,这些公司也开发了各自的软件来进行处理,例如美国Trimble公司所开发的Realworks软件,它功能强大,可从空间成像传感器导入数据,并转换为三维成果。RealWorks Survey的一些工具在管理、处理和分析包含数百万点的大型数据文件方面,能够提交高质量的成果。
将三维激光扫描技术运用在零件检测领域在国内也有了一定的发展。2005年,简正伟提出了基于逆向工程技术进行数字化检测车身覆盖件,他首先将点云数据与数学模型通过精确的曲面匹配,其次在检测软件中进行误差比较,得到了很好的成果。2008年,杜丽杰在逆向工程基础上进行了复杂铸件的质量检测,充分分析了该方法的可行性,并提出了质量检测方法,实现了产品检测的数字化、自动化、可视化。2013年,宗敏在基于三维激光扫描技术的复杂构建检测研究中,对轮廓检测合格的零件进行进一步检测其孔位误差,更加完善了三维激光扫描技术在零件检测领域的研究。
1.4本文研究内容与技术路线
1.4.1本文的研究内容
本文的研究内容主要包括:
- 三维激光扫描测量方法、测量原理和三维激光扫描设备;
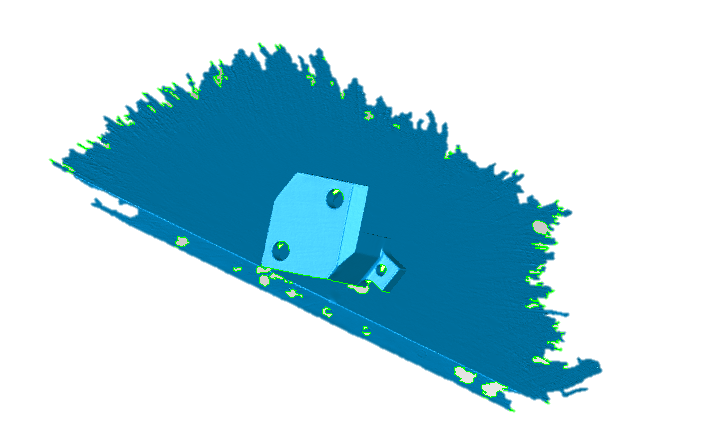
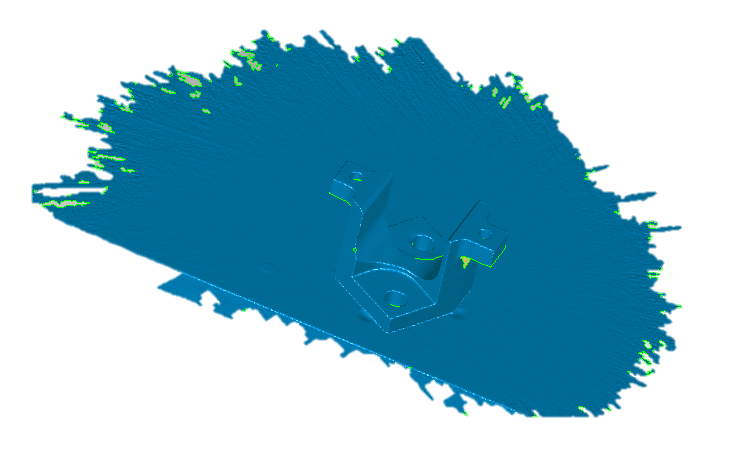
- 以高铁零件为例,研究点云的获取,对点云数据预处理;
- 基于三维激光扫描检测高铁零件,将扫描得到的点云与其标准三维模型进行匹配、对齐,检测其是否符合标准;
- 设计一个检测程序,用于检测零件长度指标。
1.4.2本文的技术路线
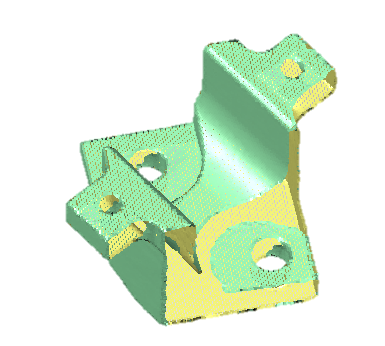
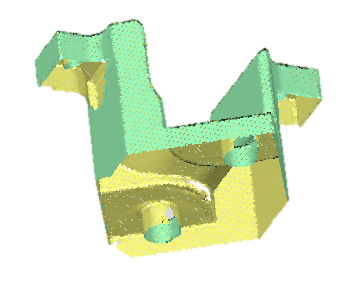
(1)高铁零件误差检测的技术路线:利用Geomagic Studio软件可以完成零件点云模型的快速建模工作,得到了零件的3D模型后通过Geomagic Qualify软件进行数据的分析工作。
在建模过程中需要注意保持点云的完整以便后续误差检测可以相对精确。
(2)检测程序设计技术路线:由于C#具有良好的用户界面设计功能,所以选择其为程序语言。检测长度需要明确知道零件的边缘,并且选择待测部位。采用Roberts算法检测出零件边缘,利用C#中鼠标点击命令选择待测部位即长度的两端可以得到坐标值,由于已知图像标定,便可计算出长度,达到检测的目的。
技术路线如图1-1所示:

图1-1 技术路线图
1.4.3本文的研究目标
首先,将点云数据代替实物,与理想设计模型进行比较,分析误差报告,研究将三维激光扫描应用到检测领域的可行性。其次,自行设计检测程序,完成对单个零件的检测,分析其精度误差,将三维激光扫描技术与程序设计相结合。
2三维激光扫描
2.1三维激光扫描的定义
三维激光扫描技术(3D Laser Scanning Technology)即“实景复制技术”是测绘领域的新兴技术,是由传统测绘技术与现代高科技手段结合而发展起来的。三维激光扫描技术主要是获取待测目标的线、面、体、空间等三维实测数据,这些密集而连续的点数据被称为“点云”,然后进行高精度的三维逆向建模。它不同于传统的单点定位测量以及传统的点线测绘技术,其特点是精度高、速度快。三维激光扫描技术是继GPS技术以来,测绘领域的又一技术革命。
2.2三维激光扫描的原理
三维激光扫描测量仪采用非接触测量技术中的高速激光测量方法,通过点云的方式获得三维坐标,每一个扫描云点的测量都是基于三角测量原理进行的。由于仪器的不同,其工作原理也不同,大致分为以下三类:
(1)脉冲测距法:由激光发射器发射激光,经待测物体反射后由测距仪接收,测距仪记录激光往返时间t,距离则为s,激光发射器在水平方向旋转角,垂直方向旋转角,如图2-1,通过坐标计算原理(2-1),可以计算出三维坐标。脉冲测距法测距距离远,精度较低,扫描速度慢。
(2-1) |

图2-1 三维坐标图
(2)相位干涉法:对激光束的幅度进行调制并且测定调制光线往返一次所产生的相位延迟,再根据光束波长解算出距离,即测定往返一次所需的时间,同时记录水平与垂直角,计算出待测物体三维坐标,如图2-2。相位干涉扫描仪扫描速度快,精度高,但测量距离较短。

图2-2 相位式测距原理
剩余内容已隐藏,请支付后下载全文,论文总字数:18665字
相关图片展示: