论文总字数:22599字
目 录
一、绪论 1
1.1 研究的背景及其意义 1
1.2 本文研究的主要内容 1
二、GPS的基本概念及其误差分析 2
2.1 GPS的基本概念 2
2.2 GPS的定位原理 3
2.3 GPS的误差分析 3
2.3.1 误差来源分析 3
2.3.2 GPS误差改正方法 5
三、电离层对GPS定位的影响 5
3.1 电离层的基本概念 5
3.2 电离层对GPS定位的影响 6
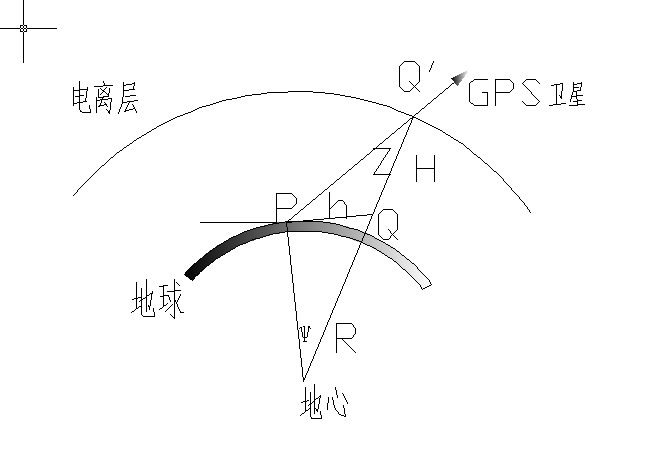
3.3 电离层延迟修正 7
3.3.1 双频改正法 7
3.3.2 模型改正法 8
3.3.3差分改正法 8
3.4 电离层延迟模型 9
3.4.1 本特(Bent)模型 9
3.4.2 国际参考电离层模型(IRI模型) 9
3.4.3 克罗布歇(Klobuchar)模型 9
四、Klobuchar模型修正算法 10
4.1 Klobuchar模型改正算法 11
4.2 Klobuchar模型算法过程 13
4.3 Klobuchar模型实验分析 17
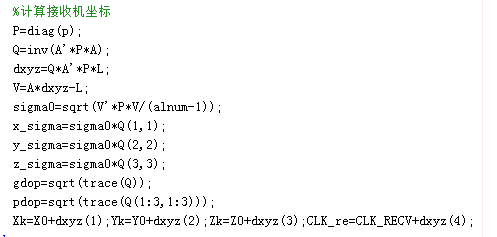
4.3.1 单频接收机坐标计算 17
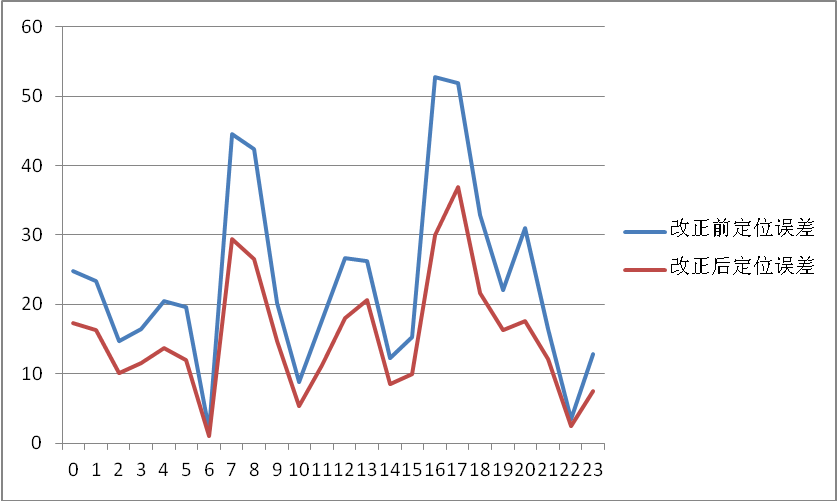
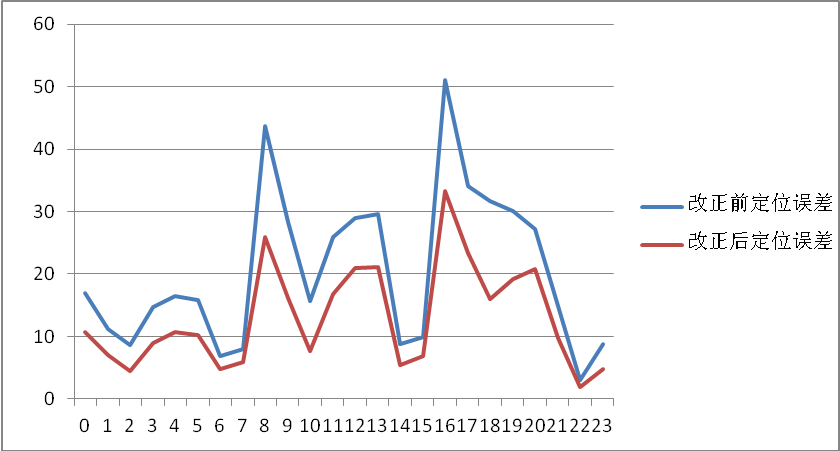
4.3.2 Klobuchar模型改正 20
4.3.3 误差分析 23
五、总结 26
参考文献 27
致谢 29
电离层对GPS定位的影响与修正
何青松
,China
Abstract:Global Positioning System (GPS) as a capable all-weather navigation and positioning in real time with high precision spatial positioning technology,in military and civilian fields are showing more and more important role.In this dissertation the main content is about errors in GPS navigation positioning,,the system analyzes the causes of these errors and their correction method. The ionosphere delay error is an important error source of GPS,this article focuses on the structure of the ionosphere,GPS signals’spread in ionosphere and the main effects on the GPS signals of ionosphere are further studied.summarized several ionospheric errors generated,and listed several ways to correct them.The construction of Klobuchar model and its calculation are finally expounded,and finally the correction effect of Klobuchar on the ionospheric delay is verified by comparing with the actual data.
Keywords:GPS;nosphere; Klobuchar;error correction
一、绪论
1.1 研究的背景及其意义
全球导航定位系统(GPS),一种利用GPS定位卫星进行全球范围内实时、连续的定位系统。GPS为用户提供精确的、实时的三维定位数据,进而解算定位提供导航定位服务。GPS的出现推动了空间定位技术的发展,不仅在军方体现了其高效的定位能力,优秀的工作性能也让GPS在社会各个生产建设领域都有不错的表现。随着经济建设的蓬勃发展,GPS的运用也越来越广泛。在国家经济建设、国防事业发展和社会生活水平提升的各个方面,GPS技术已经逐渐成为必不可少的一环。
全球定位系统技术的高速发展,满足了人类对导航定位的需求,而且伴随现代科学技术的不断革新,社会生产力的不断提高,GPS定位精度在生产生活中也愈发重要。而GPS导航定位精度的高低受到了误差的影响,想要提高精度必须透彻研究定位误差产生的原因、来源和规律,从而才能运用相应的方法,降低定位误差对GPS的影响,进而提高GPS导航定位技术在生产生活中的可靠性和精确性。
1.2 本文研究的主要内容
GPS定位测量误差受多种因素影响。在对电离层产生的误差修正中,由于电离层本身的不断变化难以琢磨,在对其进行定位改正中利用建立的电离层模型,提高定位精度。本文系统的介绍了GPS的概率、发展和误差的分析与修正,重点探讨了在误差产生中电离层延迟对精度的影响,电离层改正模型对误差的改正效果,以及对单频接收机精度提高的帮助,并对Klobuchar模型在延迟改正中实际效果进行讨论。本文具体内容如下:
(1)本文详细介绍了GPS的基本概念和导航定位原理,GPS误差的产生原因分析以及修正方法。
(2)本文详细介绍了电离层的基本情况,电离层对GPS信号的影响,产生的误差分析,并列举了几种能有效改正电离层延迟误差的修正方法。
(3)详细探讨了单频接收机定位精度改正的现状和研究意义,详细实验研究了Klobuchar模型的实际改正效果和可用性。
二、GPS的基本概念及其误差分析
2.1 GPS的基本概念
全球定位系统(Global Positioning System),是于1973年由美国牵头,联合北约以及澳大利亚等各方代表共同研究、组建的高精度卫星导航定位系统[1]。1993年7月,用于GPS导航定位的卫星数量已经达到24颗,系统已经具备了全球连续导航定位能力,GPS系统正式开始运行。GPS系统与它的前身子午导航系统相比,GPS的定位精度更高、工作效率高、信号稳定连续,抗干扰的能力也更强。不仅满足了美国军方对定位系统的需求,也吸引了人们对GPS民用极大的兴趣。现代GPS定位技术不仅仅只是运用的定位导航上,在测量勘测方面也取得了极好的经济效益。
GPS系统由三个部分组成(如图1):长期运行在空间轨道上的空间星座部分;进行数据分析传递,以及对卫星的监测调控的地面监控部分;接收信号的用户设备部分。三个组成部分需要数据整合、联合演算作为一个整体情况下,才能来完成定位过程。
(1)空间星座部分,主要是由分布在6个轨道面,一共24颗导航定位卫星组成,这些卫星实时向地球表面发射卫星信号,提供解算所需要的数据。
(2)地面监控部分,是由主控站,注入站和监测站三个部分组成,三个部分协同工作。地面监控部分在接收到卫星信号后,经过数据处理可得到卫星的轨道信息,然后地面监控部分再把处理后的信息数据发送给卫星,卫星在接收到该信息后将再次向地球表面播发。
(3)用户设备部分即用户通过硬件接收机获取卫星二次播发的信息数据,利用数据处理软件对信号结算从中可得到卫星的在轨信息等,继而可以确定点位,完成整个定位过程。
图1 全球卫星定位系统
2.2 GPS的定位原理
GPS定位其实就是由卫星传播电磁波信号,由地面接收机接收信号,计算两者信号传播的时间差。有这些时间差算得的卫星到接收机的距离值作为GPS定位的基础观测量,用已知卫星坐标运用后方交会的方法解算接收机的位置坐标。但是由于传播误差、卫星钟误差、接收机误差等各种定位误差的存在,导致由观测得到的数据解算出的距离与实际卫星与接收机的绝对距离不同,因此这种测站至卫星的距离称为伪距。测量一个接收机站点的坐标,至少需要解算3个已知卫星到站点的距离,而通常情况下除了3个位置参数外,还要增加一个卫星进行同步定位,用来提供解算参数的数据基础,即测量一个接收机站点是4颗卫星进行同步观测从而解算出位置点坐标。(如图2)
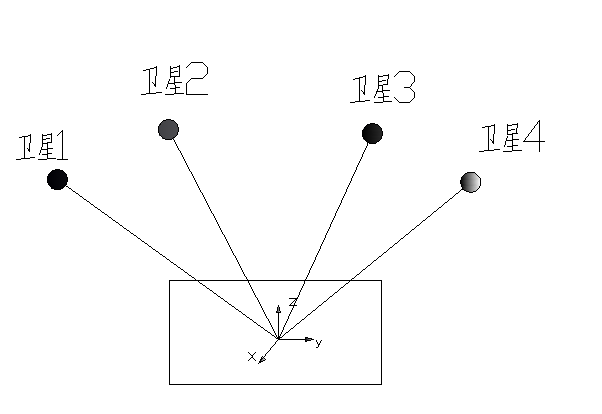
图2 GPS定位原理
2.3 GPS的误差分析
2.3.1 误差来源分析
GPS卫星星座和接收机本身都存在一定误差,而且GPS信号由卫星传播到接收机的过程受到了来自多个方面的影响,按照误差来源可以大体分为以下3类[2]:
(1)与卫星有关的误差:主要包括卫星星历误差:由卫星信号传播回来的星历所解算出的卫星位置和卫星运行速度与卫星在太空中的实际工作状态存在的差异;致解算出的卫星空间坐标不准确,从而产生了定位误差;卫星钟的钟误差:卫星是所使用的原子钟产生的误差;相对论效应:指卫星中的原子钟位于外太空,与地面接收机内的钟,所处外界环境的磁场、重力大气等客观因素的不同而造成的误差。
(2)与信号传播有关的误差:卫星信号传播过程中,信号传播的路径和传播速度由于外界大气的影响发生了不同程度的变化,这样产生的误差主要有对流层折射误差和对流层延迟误差;多路径效应则是因为卫星信号经过其他反射物体或者干扰源反射干扰后,与直接来自卫星的信号叠加后产生的系统误差。
(3)与接收机有关的误差:即是与接收机有这直接关系的误差,主要包括接收机本身仪器内的钟产生的时钟误差,接收机的位置误差,以及接收机测量噪声。
上述各项误差对于GPS测距的影响可以达到数十米(如表1),在GPS定位测量产生的诸多误差中,电离层对定位误差的影响的最大的,电离层延迟误差是导致单频GPS接收机无法在广域GPS测量中得到应用的主要原因。电离层引起的测距误差,一般情况下由电离层引起的延迟误差都能产生数米的导航定位误差,严重的时候可以达到一百多米的误差。
剩余内容已隐藏,请支付后下载全文,论文总字数:22599字
相关图片展示: