论文总字数:23013字
目 录
1 绪论 1
1.1 课题研究背景及意义 1
1.2 国内外研究现状 1
1.3 本文主要工作 2
1.4 本文主要结构 3
2 多旋翼无人机自动巡航方案设计 3
2.1 总体设计要求 3
2.1.1 便捷性 3
2.1.2 实时性 3
2.1.3 适用性 4
2.1.4 高效性 4
2.2 硬件和软件平台的选择与环境搭建 4
2.2.1 多旋翼无人机的选择 4
2.2.2 开发平台的选择 5
2.2.3 开发环境的搭建和配置 5
2.3 本章小结 6
3 动态规划算法 6
3.1 最短路径问题简述 6
3.2 动态规划算法原理 6
3.3 动态规划算法设计 7
3.3.1 确定输入与输出 7
3.3.2 确定编程语言 7
3.3.3 建立算法模型 7
3.3.3.1 最优子结构 7
3.3.3.2 边界 7
3.3.3.3 状态转移方程 7
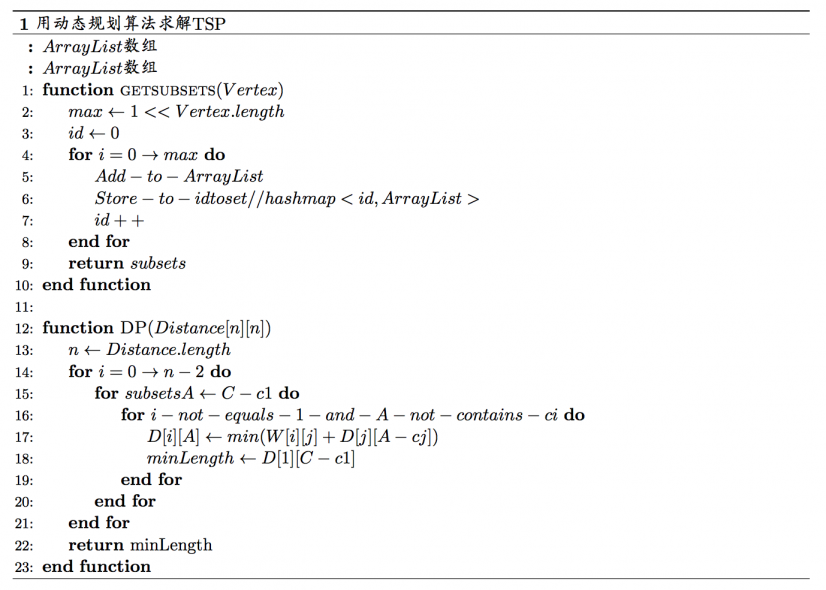
3.3.3.4 算法伪代码 8
3.4 本章小结 8
4 应用以及算法的实现 8
4.1 界面设计 8
4.2 功能实现 9
4.2.1 控件功能 9
4.2.1.1 按钮控件 10
4.2.1.2 视频窗口控件 10
4.2.1.3 单选控件 10
4.2.1.4 其他控件 10
4.2.2 数据回传 10
4.2.3 巡航功能 11
4.2.3.1 大疆SDK和UI库导入 11
4.3.2.2 应用激活与初始设置 12
4.3.3.3 实时定位 12
4.3.3.4 任务点选择 13
4.3.3.5 任务上传 13
4.3.3.6 任务开始与停止 13
4.2.4 地图功能 13
4.2.4.1 配置AMAP API秘钥 13
4.2.4.2 地图权限及配置 15
4.2.4.3 地图初始化及显示 16
4.2.4.4 坐标转换 16
4.2.4.5 路径显示 17
4.2.5 最短路径规划 17
4.3 本章小结 18
5 基于Mavic pro无人机的仿真与实验 18
5.1 仿真实验 18
5.2 真实实验 19
5.3算法正确性验证 20
6 总结与展望 21
6.1论文总结 21
6.2未来展望 21
参考文献 22
致谢 23
立体空间无人机自动巡航技术研究
支悦言
,China
Abstract: Multi-rotor drones have developed rapidly in recent years, and their cruising capabilities have greatly improved the operational efficiency of environmental monitoring, power inspection and other industries. However, currently existing UAV auto-cruise applications often need to be combined with ground control stations or PCs, and there is a lack of reasonable path planning. In addition, in the face of complex three-dimensional space cruise missions, the existing two-dimensional plane cruising technology is often incompetent. Therefore, in order to solve the above drawbacks, this paper uses the major consumer-level UAV Mavic Pro to develop an application on the Android mobile platform. The application can realize the automatic cruising of drones in three-dimensional space, and at the same time utilize the dynamic programming algorithm to achieve the shortest path. The results of simulation tests and real-world tests show that the application can complete auto-cruise in a three-dimensional space and realize the planning of the shortest path.
Key words: UAV, Auto-cruise technology, Shortest path, Android mobile platform
1 绪论
1.1 课题研究背景及意义
无人驾驶飞行器(Unmanned Aerial Vehicle,UAV)又称无人机,是用无线电遥控设备或机载电脑和程序控制的不载人飞机。无人机从种类上可分为旋翼式、固定翼式和直升机型。目前主流的旋翼式无人机主要有四旋翼式和六旋翼式,少数可达到八旋翼甚至更多。和固定翼式无人机相比,旋翼式无人机有其不具备的优势,比如可悬停,可垂直起降等。正因如此,旋翼式无人机不仅在军事方面用于侦查和作战,在民用方面用途也十分广泛。在农业植保、灾难救援、影视拍摄、快递运输、电力巡检等领域发挥着巨大的作用,如图1。所以各个国家也在大力发展多旋翼无人机相关技术,扩大其应用领域。




a b c d
图1 无人机部分应用 a) 电力巡检 b) 农业植保 c) 救援 d)影视拍摄
近年来无人机市场规模迅速扩大,各种智能化技术正逐渐集成于无人机上。《2017年中国十大智能制造趋势》[1]指出,中国无人机市场经过数年时间的发展正逐渐成熟。虚拟现实、人工智能和视觉系统等技术将在更多的领域被使用,尤其是机器人和无人机领域。
在无人机诸多应用中,因其机动性高,视角优秀,可覆盖区域广,巡航是备受人们关注的一点。传统的方式是由操作人员操控无人机来巡航,相较于目前的自动巡航技术,传统方式对操作者来说是一个较大的考验。然而,目前的自动巡航技术也存在一些弊端,比如(1)需要配合地面控制站或者pc机才能使用,便携性较差;(2)只能在二维平面中巡航,无法单独设置高度;(3)缺乏对巡航路径的规划,巡航效率较低。
本文的研究意义在于:(1)增加了三维空间内的巡航功能,扩大了应用的适用范围。(2) 设计了一种方便、直观的显示方案,能够在移动终端实时显示,提升了整套系统的便携性且有利于工作人员实时掌握环境等信息。(3)采用了动态规划算法对所有任务点进行排序来求出最短路径,有利于提升作业效率。
1.2 国内外研究现状
我国最早的无人机研究是在上世纪70年代,主要用于军方的侦查,直到80年代才武装到部队。随着技术的成熟和大疆等企业的快速崛起,无人机市场发展迅速,安全性日益提高,操作性更加便捷,无人机的种类及功能也日渐繁多,其中无人机自动巡航一直以来是无人机研究中一项热点,巡航中的重点和难点在于路径规划,许多学者也在这一方面做了很多努力。
在国内,柳长安[2]等采用遗传算法来规划路径,该算法用于无人机侦查任务中,能显著提高侦查的效率。郑锐[3]等提出了一种改进的遗传算法,通过对保优选择策略和编码方案的改进,解决了原理算法中搜索速度慢,效率低的问题。周成平[4]等提出了三维稀疏A*算法,通过对节点标准加以简化,减轻了瓶颈效应,解决了原来算法中存储数据难以满足要求的问题。李佳泽[5]等人改进了模拟退火算法,通过构建威胁与障碍的Voronoi计算出了目标函数,提高了无人机多目标攻击路径规划中寻优速度。楚瑞[6]采用蚁群算法,在规划的网络图中求出最优节点,提升了算法的性能。陈谋[7]等改进了蚁群算法,通过当前最优路径信息来选择节点,提高了算法在路径规划中的速度。丁家如[8]等提出了一种改进的人工势场法,通过对威胁分布的规划,改善了传统人工势场法易陷入局部最小的问题,提高了寻优能力和适应性。何雨枫[9]提出了一种TBMRACO算法,该算法是基于蚁群算法的改进,能满足微小型无人机在室内的自主导航需求。此外还利用A*算法实现了室内微小型无人机的全局路径规划,并且提高了规划的效率。喻俊松[10]等提出一种改进的人工鱼群算法,通过利用较大步长全局和较小步长及网格分段搜索较优路径和遍历策略,提高了算法的精确性和稳定性。张华[11]等提出了一种动态参数更新的无人机三维路径规划方法,利用模拟栅格法进行两次空间区域划分,形成局部节点集合和全局离散点集合,然后在离散点集合中搜索出最优路径,同时引入函数DF1产生复杂的三维动态环境,提高了实时性和效率,降低了空间复杂度。王宇[12]等提出一种基于Grid-GSA算法的路径规划方法。通过栅格化算法,根据无人机方向以及地理环境信息预测无人机出现在栅格的概率,有效减少了无人机作业时间。
美国最早开始无人机的研究。英国和德国也在一战时期开始研究并取得重大进展。近几年,以美国为首的无人机大国,都已将虚拟现实,人工智能等技术集合在无人机之上。
在国外,Baker[13]等人改进了遗传算法,采用最邻近搜索方法对算法求得的解进行搜索,使得算法搜索精度有了提高。Robert J. Bell[14]等人提出了一种多蚁群算法,在对路径搜索的过程中,利用候选列表对客户进行挑选,依照每组蚁群特有的信息素来寻优提高了发现最优解的效率。Silva Arantes J[15]等人提出了在紧急着陆时应用的启发式算法和遗传算法,该方法可以在无人机遇到紧急情况而不能执行任务时寻找路径,并且不会危及人员和财产安全。Mohammadreza Radmanesh[16]提出了一种灰狼优化(GWO)的算法,该算法能在存在运动障碍物的情况下找到最优无人机轨迹,模拟实验证明了该方法在解决无人机轨迹规划问题中的有效性。Vincent Roberge[17]等人利用遗传算法(GA)和粒子群优化算法(PSO),对复杂的三维环境下计算固定翼无人机的最优轨迹,然后使用标准商用现成多核CPU实现无人机的实时路径规划。
1.3 本文主要工作
本课题针对立体空间内无人机自动巡航技术进行了相应的研究,利用大疆无人机并结合Android移动平台、大疆Mobile SDK和高德地图SDK开发了一款移动端的的app。此外,我们还使用动态规划算法实现了最短路径的规划。最后在仿真平台和真实环境下进行了测试,证实了功能的可用性和稳定性。主要研究内容如下:
(1) 从课题的项目入手,明确传统巡航中存在的缺点,对新设计的巡航方案提出了相应的改进要求。
剩余内容已隐藏,请支付后下载全文,论文总字数:23013字
相关图片展示: