论文总字数:16755字
目 录
1、背景介绍 5
1.1 选题目的和意义 5
1.2 国内外研究现状 5
1.3 主要工作介绍及论文结构 6
2、 数据介绍 6
2.1 实验介绍 6
2.2 实验仪器 8
2.3 数据 9
3、 方法 9
4、结果及分析 11
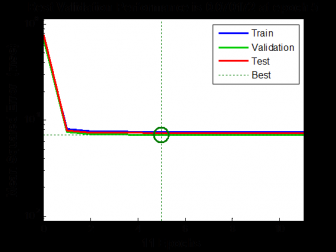
4.1 特征值为标准差的网络训练结果 11
4.2 特征值为平均值的网络训练结果 14
4.3 特征值为最大值的网络训练结果 16
4.4 特征值为最大值 最小值的网络训练结果 19
4.5 特征值为平均值 最大值的网络训练结果 21
4.6 特征值为标准差 平均值 最小值 最大值的网络训练结果 24
4.7 六种不同特征值选取情况比较 26
5、总结 27
6、 参考文献 28
致谢 28
基于BP神经网络的遥感图像船舶识别
李雪
,China
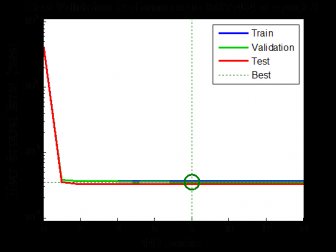
Abstract:Ship recognition and detection is of great practical significance. The navigation X band radar can identify and monitor the moving targets of marine ships conveniently. In this paper, the method to detect sea surface ships is studied by using neural network. In order to effectively identify the ship in the X band radar image, the different characteristic parameters of the radar image are firstly extracted, including the average, the standard deviation, the maximum and the minimum of the image intensity. Secondly, the back-propagation(BP) neural network is created and the neural network is trained and tested, thus the recognition of the ship is realized. The experimental data set is used to verify the established model. The results show that the more data are included in the data set, the better the network training results are. When the four selected features are included , the network works best, with an error rate of 0.02.
Key words:Ship identification,Navigation X-band radar,BP Neural Network
窗体底端
1、背景介绍
1.1选题目的和意义
船舶目标检测与监视是世界各海岸地带国家的重要任务。我国是一个海洋大国,海岸线长达18000多公里,享有主权和管辖权的海域有300多万平方公里,海洋资源极为丰富。新时代“海洋强国”战略的提出,海洋发展已经成为我国未来发展的重点。在海洋发展中,海洋交通事业的发展迅速,船舶在数量、吨位和航速上逐年增加,船舶碰撞、船舶撞桥等事故发生的频率越来越高;而且近年来,我国与一些周边国家存在海上领土纷争,对近岸海域船只的监管对我国海上领土安全也具有重要意义。所以加强对我国管辖海域的船舶检测与监视就显得尤为重要。
遥感技术的发展使利用遥感图像识别与监测海面舰船目标成为了可能。合成孔径雷达(SAR)由于其全天候、全天时的观测能力使得SAR卫星在空间监测、远洋海洋检测等领域被广泛应用,成为海洋遥感观测的重要手段之一。在舰船检测发展历史中,各国研究者提出了很多基于SAR 图像的舰船检测算法。但是由于卫星轨道的重复访问周期长,不能实现船只实时检测。而导航X波段雷达相对于合成孔径雷达(SAR)等设备具有更加实时、稳定、便捷的特点。它不仅可以随时进行近域海况的测量,不需要无线传输装置,不易受干扰,工作稳定,而且探测范围更广,安全性更高。利用导航X波段雷达进行船舶识别和监测具有重要的实际意义。
1.2 国内外研究现状
1978 年在 SEASAT 的 SAR 图像上,人们第一次发现海洋表面延伸 20 km 长的舰船尾迹,从那以后逐渐对 SAR 图像舰船尾迹表示关注并进行研究。利用 SAR 图像检测舰船及其尾迹,是在不同气象条件下监视舰船的自动化手段,目前国际上已经发展了众多的星载 SAR、机载 SAR,获得了越来越多的SAR 图像数据。随着海量的 SAR 图像用于舰船及其尾迹检测,开展自动检测算法方面的研究越来越受到关注。1986 年挪威国防研究院( NDRE) 与欧空局( ESA) 签订合同,开展利用 SEASAT 图像进行舰船和舰船尾迹 SAR 检测的研究项目; 在之后的数年中,发表了众多关于 SAR 图像舰船尾迹和产生机理的研究论文[1]。2000 年 5 月 30 日 ~ 6 月 1 日,在加拿大新斯科舍省 Digby城,由海洋遥感联盟( AMRS) 召集,专门召开了世界上第一次关于海岸水域舰船检测的专题讨论会“Ship Detection in CoastalWaters Workshop 2000”,讨论了各种检测舰船的传感器( 包括 SAR、高频表面波雷达、声学方法、光学传感器) 、检测平台和检测算法。 近年来,各国研究人员开展了大量的SAR舰船检测研究工作,提出和发展了很多算法,如恒虚警率(Constant False Alarm Rate,CFAR) 检测算法;加拿大商用软件OMV[1]使用K-CFAR 进行舰船检测;Waterman C C 使用双参数CFAR 对SAR图像进行检测; KapurJ N 等[1]将信息论中的熵引入图像分割,提出了最佳熵双阈值检测算法;TelloM 等使用小波变换来检测舰船目标; 张风丽[3]等提出了基于小波变换和相关运算结合的舰船目标检测算法; 鲁统臻[4]等提出了利用GO 分布对海杂波建模的舰船检测算法。 目前,在雷达 图像中进行舰船检测的研究较多,大多数是使用恒虚警( CFAR) 算法针对中低分辨率( 25 m 以上) 的SAR 图像进行,对于舰船目标的研究除了目标检测外,也要考虑到检测方法是否有利于目标参数提取,从而有利于后续的目标分类和识别。
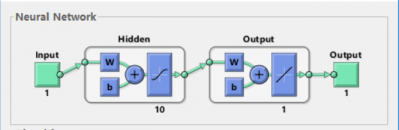
近年来,由于人工神经网络(ANN,Artificial Neural Network)的自我管理、自我学习等特点,能够快速地找到最优解。越来越多的学者专家将人工神经网络应用到脸谱分析、目标分类和交通事故分析等方面,人工神经网络的应用越来越受到人们的关注。在人工神经网络的应用中,应用最为广泛的就是多层前向神经网络。在多层前向人工神经网络中,神经元的分布方式为层分布,通常由输入层、隐含层和输出层组成,每一层神经元只能接收其上层神经元输出的信号。多层前向神经网络由非线性神经元组成,经典的算法有误差反向传播算法(BP)和径向基函数算法(RBP)等。通过提取雷达图像特征值训练人工神经网络实现对雷达图像中船舶的识别与监测具有较高的效率和准确率。
1.3 主要工作介绍及论文结构
本文利用BP神经网络对导航X波段雷达图像中的船舶进行识别。主要创新点在于选取了不同的图像特征来识别船舶,分别比较不同数据集对同一特征值选取情况和不同特征值选取情况下的BP神经网络的训练效果,从而确定最优的特征参数。
本文的结构如下,
第一部分:本研究的背景介绍;
第二部分:对本文用到的雷达图像数据进行介绍;
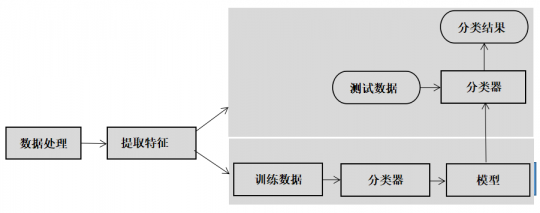
第三部分:详细介绍本文提出的船舶识别方法;
第四部分:利用实验数据验证方法及结果分析;
第五部分:对本研究的总结。
- 数据介绍
近年来,江苏省海洋环境探测工程中心研制了导航X波段雷达海洋观测系统,该系统已经进入商业推广,并且在国家海洋局、石油平台等得到了应用。本文所用数据是利用该系统于2013年12月在我国海坛岛进行的观测实验所采集的。
2.1 实验介绍
观测实验的地点位于我国福建省海坛岛,海坛岛是我国第六大岛,福建省第一大岛,岛屿南北长29公里,东西宽19公里,占地面积200多平方公里,其地理位置如图2.1(a)所示。实验观测时间选在12月,原因是这段时间该地区受寒潮影响频繁,经常有高海况出现,风力较大在25米/秒左右,风向主要以东北风为主。
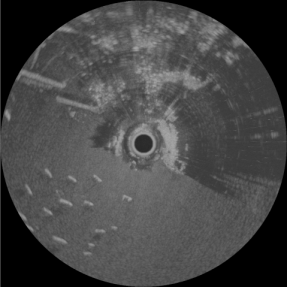
观测地点位于该岛的东侧,图2.1(a)中红色圆圈标出了雷达的扫描范围,雷达站的北边是陆地,西边是港口,东南边联接外海,这样雷达站所能观测到的海区具有较大的地形起伏变化,西边港口和近岸处水深较浅,东南方联接外海处水深较深,尤其距离雷达站东南方约950米处的水深可以达到28米。雷达站西边的港口多船只停泊和过往,有大型货船同时也有渔船等小型船只,如图2.1(c)所示。
图2.1 海坛岛地理位置 (a)图红色圆圈为雷达扫描范围,(b)图为观测海区,可以看到图中港口多船只



(c) 实验海区附近海面的船舶,主要有大型货船和小型渔船等。
2.2 实验仪器
观测实验使用江苏省海洋环境探测工程中心研制的导航X波段雷达海洋环境观测系统进行数据采集。系统的组成和工作流程如图2.2所示,它包括一台导航X波段雷达,一台个人电脑和一套软件。由于船载的导航X波段雷达是一种非相干真实孔径的脉冲雷达,为了记录海表面的后向散射信号,所以对雷达和电脑做了一些改进:将水平极化天线改为垂直极化天线;电脑中加装了一个用于从雷达的对数放大器的输出端接收信号并将其转化为数字信号存储在计算机中,采样频率为40 MHz的PCI数据采集卡;开发了一套用于控制雷达和电脑的工作、记录雷达图像序列并进行数据处理的软件。
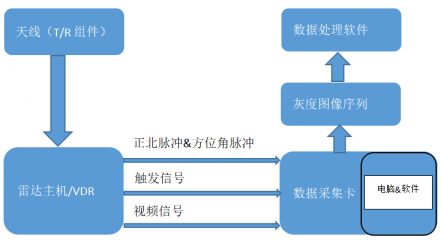
图2.2 导航X波段雷达海洋环境观测系统的组成和工作流程
如图2.2所示,这套系统的基本工作流程是:首先天线向海面发射电磁波并接收海面的后向散射回波信号,然后数据采集卡经由雷达主机记录后向散射信号的强度及其对应的天线位置,并将这些信息存储在电脑中,最后数据处理软件用存储的导航X波段雷达图像序列反演需要的海浪、海流等参数。其中导航X波段雷达的基本配置参数如表2.2,用该系统观测海浪时每个雷达序列记录32幅雷达图像,共需要80秒;数据采集卡用于接收雷达主机传回的三种信号,正北脉冲和方位角脉冲、触发信号和视频信号,并将接收到的信号数字化为256个灰度级的灰度图像存储在电脑中;软件用于控制整个系统的运行,包括主程序模块、数据采集模块和数据处理模块。
表2.2 导航X波段雷达的基本配置参数
参数 | 数值 |
极化方式 | VV |
工作频率 | 9410 兆赫兹 ± 30 兆赫兹 |
脉冲重复频率 | 3000赫兹 |
脉冲宽度 | 70ns |
发射功率 | 25 千瓦 |
天线增益 | 30.2 dB |
天线波束宽度 | 水平方向1.2°,垂直方向20.5° |
天线类型 | 2.4米缝隙波导天线 |
天线转速 | 24 转/分钟 |
2.3 数据
剩余内容已隐藏,请支付后下载全文,论文总字数:16755字
相关图片展示: