论文总字数:17754字
目 录
摘要 1
前言 1
1 设计任务及方案 2
1.1 设计任务及要求 2
1.2 设计方案论证 2
1.2.1 控制器选择 2
1.2.2 电机驱动芯片的选择 3
2 系统硬件电路与实现 3
2.1 电源模块 4
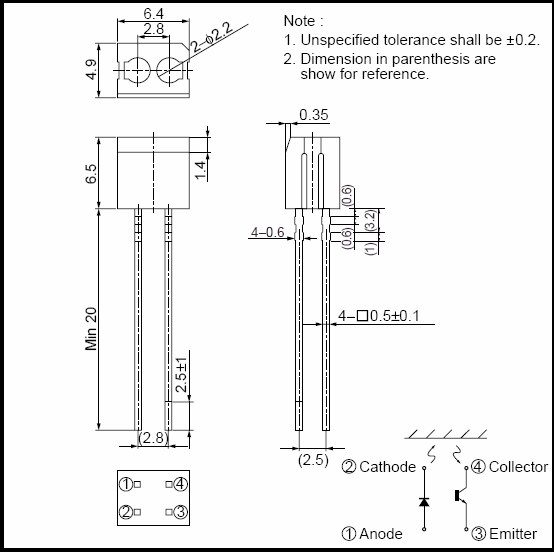
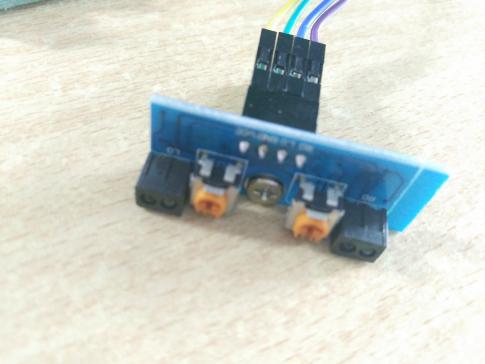
2.2 红外检测循迹模块 4
2.2.1 循迹功能 6
2.2.2 悬崖急停功能 7
2.3 电机驱动模块 8
2.4 路况检测模块 9
2.4.1防撞报警功能 10
2.5数码管显示模块 11
3 系统软件设计与实现 12
3.1 整体程序的构架 13
3.2 电机驱动程序设计 14
3.3 小车循迹程序设计 14
3.4 小车防撞报警程序设计 15
3.5 数码管显示程序设计 16
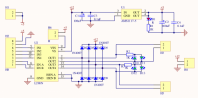
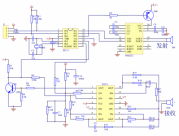
4 小车系统原理图 16
5 系统调试 17
5.1电机调试 17
5.2 循迹与避障功能调试 18
总结 20
参考文献 21
致谢 22
附录 23
作品摄像 23
相关程序 24
基于单片机的智能小车的设计
孙亮
,China
Abstract:The design of the main application STC89C52 as the control, and display driver integrated circuits and other systems. Based on single chip design. MCU STC89C52 using the controller as an alarm device that can give full play to STC89C52 of data processing and real-time control functions. Make the system work in the best condition,improve the system sensitivity. When two signal driven forward by car tracing module, the infrared tube on whether to produce level signals through the black, return again according to requirement of design procedure of judgment for motor driver module, it controls the car turning back forward of running on the black line. In the obstacle avoidance module, the microcontroller through the detection of ultrasonic signals to determine the traffic conditions and timely feedback information to the drive module to control the car can bypass the obstacles normal forward.
Finally, the production and debugging of the physical samples were carried out, and the experimental tests were carried out. The test results showed that the intelligent car could realize the expected tracking obstacle function and the experimental results were in accordance with the expectation.
Key words: SCM, Tracing, Avoidance , Alarm device , Motor driver module
前言
随着社会的进步与科技的发展,越来越多的空间的被发掘,出现了许多人力所不能及或是有人力抵达有很大风险的地域,所以寻找一种可以代替人力的智能产品的应用就变得越来越重要。那么智能车的开发就适应了这种发展的需求,能够按照既定轨迹前进并能自主绕开障碍物,最终达到指定地点完成后续工作。
纵观国内外近些年来在智能车领域的发展概况,可以发现,在国内,由于先前对于智能车领域的重视不够,或者说是受国内发展水平的限制,导致相关领域长时间未能与国际接轨,也就造成了智能车研究领域如今的研究发展与国外相比有很大的落后,但是随着近几年的智能领域需求的增长,智能车的研究开发也开始逐步进入正常发展的轨迹。直到20世纪90年代的第二年由国防科技大学成功研制出的一辆名为“红旗HQ3”的无人车的诞生,他弥补了我国长时间没有真正的无人驾驶汽车的空白,标志着我国无人车在复杂环境识别、智能行为决策和控制等方面达到世界先进水平。而在国外,因为起步较之国内较早,所以已经先行论证了技术的可行性并且已经进行了实路测试,典型的研究代表如谷歌公司的Google Driverless Car、意大利帕尔马大学的The ARGO vehicle、德国联邦国防军大学的VaMP智能驾驶系统等,这些均象征着世界智能车领域最顶尖的技术。
为了迎合当下社会对于智能车系统的发展需求,并本着简单方便且易实施的原则,所以尝试立“智能循迹避障小车”一题作为毕设研究课题。立题的目的在于通过自己所学的知识,辅以多类型多功能的传感器的帮助,能够自主独立的完成一辆简易的智能小车系统,在此过程必能有所收获,也能通过此过程获得项目整体设计的能力。
本次课题的选择正是基于这样的一种需求而提出的,旨在设计一款能够自主循迹前进,灵活绕开障碍物的智能小车,实验采用了单片机STC89C52以到达降低成本的目的,另外为了保证实验的最终效果,改进程序算法也是本次实验的必要手段。通过红外探测循迹模块对于预先设定的路线的跟踪探测,控制小车自主跟循路线前进,同时亦能在前进的过程通过测距避障模块的反馈信号达到灵活避障绕行的功能。
1 设计任务及方案
1.1 设计任务及要求
本次实验设计的任务是设计一款能够自主修正行进轨迹且能正常安全行驶的智能小车系统。设计要求如下:
●具有单片机核心控制模块;
●具有电机驱动模块;
●具有路况检测模块;
●具有红外探测模块;
●具有报警模块;
●具有数码管显示模块;
1.2 设计方案论证
1.2.1 控制器选择
方案一:采用STC89C52单片机
STC89C52RC是STC公司生产的一种低功耗、高性能CMOS8位微控制器[1]。单片机STC89C52RC具有 8K字节的系统可编程Flash存储器,另外STC89C52在使用经典的MCS-51内核的同时,加入了更为丰富的内容,这些功能的加入使得STC89C52RC的性能更加强大,使用也更加的灵活方便。
STC89C52的主要特点列举如下:
- 8K字节的程序存储空间
- 512字节的数据存储空间
- 自带4K字节的EEPROM存储空间
- 能够直接使用串口下载
方案二:采用MSP430单片机
MSP430系列单片机是美国德州仪器(TI)1996年开始推向市场的一种16位超低功耗、具有精简指令集(RISC)的混合信号处理器(Mixed Signal Processor)[2]。
MSP430的主要特性列举如下:
- 处理能力较强
- 运算速度快
- 超低功耗
- 片内资源丰富
- 方便高效的开发环境
MSP430优点:0.1uA RAM 保持;0.8uA实时时钟模式;250uA/MIPS有效;高性能模拟器件;是精确测量的理想选择。但是,为了实现单片机MSP430的低功耗特性所以导致单片机每个管脚的输出都十分微弱,也就导致其管脚的驱动能力较弱。由于本实验设计中要使用直流电机,因此需要对电机进行驱动操作,所以对管脚输出的要求比较高,因此在本系统中不适合使用MSP430,因为使用单片机MSP430不利于系统的控制。
方案选择:
通过以上方案比较,在本系统中主控制器模块的选择上采用第一个方案,选用单片机STC89C52。因为该单片机成本低廉,操作方便,且满足了本次实验中驱动电机对于单片机管脚的相关要求,因此本设计中主控制器选用STC89C52。
1.2.2 电机驱动芯片的选择
方案一:采用L298N
L298N为SGS-THOMSON Microelectronics 所出产的双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver ) ,可以直接透过电源来调节输出电压。此外,该驱动器也可用于驱动直流电机,通过软件内部程序对脉冲宽度调制信号占空比的调节可以达到控制直流电机的运转状态的目的,另外通过直接改变外部与电机连接端的正负性便可实现直流电机的两种运转方向的切换,简单方便。
L298N 驱动芯片内部是由双H桥搭建而成,其中每个H桥大概可以提供2安的电流,在驱动芯片的功率部分的供电电压范围是2.5伏-48伏,在芯片的逻辑部分需要有5伏的供电电压,接受5伏的TTL电平[3]。
方案二:采用LG9110
LG9110驱动芯片一款双通道功放器件,在电机的相关领域应用广泛。LG9110是一款推挽式的集成电路器件,该驱动芯片将驱动电路所需要的所有分立电路全部都集中到一片集成电路中去,这样做不仅使整片驱动电路的器件开销减到最低,同时也使得整个硬件电路的可靠程度提高了很多 [4]。
LG9110驱动芯片的主要特性列举如下:
- 静态工作电流低
- 电源电压范围宽 (2.5V-12V)
- 饱和压降较低
- 具备管脚高压保护功能
- 控制和驱动集成于单片IC之中
方案选择:
剩余内容已隐藏,请支付后下载全文,论文总字数:17754字
相关图片展示: