论文总字数:29202字
目 录
1 绪论 1
1.1 课题研究背景与意义 1
1.2 GPS工作原理与构成 1
1.2.1 GPS工作原理 1
1.2.2 GPS的构成部分 2
1.3 课题研究内容与设计安排 3
2 总体设计方案 4
2.1 硬件设计方案 4
2.1.1 DSP芯片的选择 4
2.1.2 GPS模块的选择 6
2.1.3 液晶显示模块TFT 7
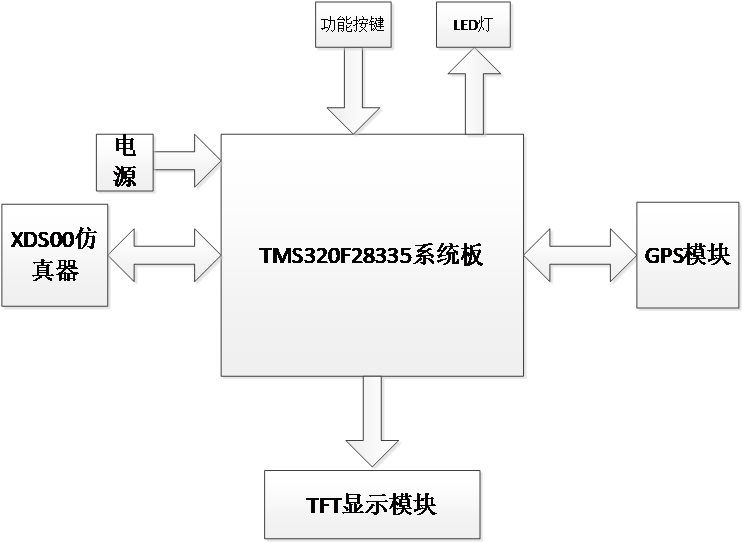
2.1.4 系统硬件总体设计框图 8
2.2 软件设计方案 8
2.2.1 GPS模块输出数据格式分析 8
2.2.2 TFT模块操作原理 10
2.2.3 系统软件总体设计框图 11
3 硬件电路设计 11
3.1 电源电路设计 11
3.2 DSP最小系统电路设计 12
3.3 TFT_LCD电路设计 14
3.4 GPS与DSP连接电路设计 14
3.5 状态指示灯与用户功能按键电路设计 14
4 软件设计 15
4.1 主程序框架设计 15
4.2 系统初始化程序设计 15
4.3 串口接收数据中断服务程序 17
4.4 用户设定主程序 18
4.4 TFT液晶屏控制子程序 25
5 系统调试与实现 26
5.1 GPS接收器印制电路板绘制 26
5.2 PCB电路板的焊接与调试 28
5.3 接收器软硬件系统联合调试 28
6 总结 29
参考文献 30
致谢 31
基于TMS320F28335的GPS接收器设计
崔迪
,China
Abstract: Global positioning system (GPS) in real life is widely used, is the development of information age the important component. Due to its good performance, high precision, wide application characteristics, has created in order to best yet navigation and positioning system. Taking Switzerland U-blox instrument Offers UBLOX-6M GPS receiving modules GSU - for example, this paper introduces the GPS communication protocol. Discussed the GPS receiving system based on DSP, proposed to the global positioning system (GPS) locate information receiving and to each positioning parameter data extraction method, and gives the system hardware circuit and software flow chart. Through this design method, the system is composed of DSP control GPS module relatively precise calculation and to display the date, time, latitude, longitude etc satellite information.
Key words:GPS;UBLOX-6M;DSP;TMS320F28335;TFT
1 绪论
1.1 课题研究背景与意义
目前由于卫星导航定位技术的不断发展,其在测绘、导航、天文、通讯和其他许多领域的应用正在推广。从其发展态势看来,这种技术还将更加深入和普及到经济、国防建设领域,甚至是人们的日常生活之中。由于GPS定位技术正在被推广和普及,GPS接收机用户数量在整大幅度增加,于是各个国家都在热衷于开发各种类型的GPS接收机,且GPS接收机正在向体积小,重量轻,低能耗,低价格方向发展[1]-[7]。
随着DSP(数字信号处理技术)的发展,DPS逐渐成为GPS卫星信号实时处理的核心。通过DSP的软件算法可以完成许多功能,使接收机具有更好的可扩展性和适应性。DSP的优点有精确、灵活、抗干扰能力强、可靠性好、体积小、易于大规模集成等,所以给GPS发展带来了极大的机遇。
近年来,由于无线通信体系的迅猛发展,以硬件为主的传统的通信平台已不能满足多样的射频频率、调制方式和多样化功能的应用需求。基于软件无线电(Software—defined Radio)概念的无线通信体系结构,以其特有的结构通用、功能灵活、系统改进和升级方便等优点,成为移动通信发展的关键技术。MILTRE公司的Joe Mitola博士于1992年在IEEE会议上首先正式提出了软件无线电( Software Radio )的概念:在一个通用、标准、模块化的硬件平台上实现无线通信基本平台,A/D、D/A尽可能靠近天线,而把尽可能多的无线通信功能用高速数字信号处理器以软件的方式来实现。高速数字信号处理器主要完成的功能有信号的调制解调、编译码和比特流处理等工作,是软件无线电的核心,也是主要瓶颈,可通过多片DSP并行处理或优化算法等来提高运算能力[1]-[7]。
正如Joe Mitola博士所说,目前大多数GPS接收机都是基于GP2021芯片的二次开发产品,此类接收机,运行速度慢、精度差、不能满足对速度和精度要求高的情况,而DSP芯片计算量大、运行速度快、接口方便、编程方便、稳定性好、精度高、集成方便,故本课题采用DSP芯片为核心处理芯片来完成一个GPS接收机设计与制作[1]-[7]。
1.2 GPS工作原理与构成
1.2.1 GPS工作原理
GPS导航系统的基本原理是测出多颗卫星到达用户的距离,利用这些数据来计算用户的位置信息。通过星载时钟所记录的时间,我们可以在卫星星历中查出卫星的位置,从而得到所需数据。通过记录卫星信号传播到用户所经历的时间,再将其乘以光速,我们可以得到用户到卫星的距离。但是我们得到的并不是用户与卫星之间的真实距离,而是伪距(PR),因为大气层的电离层存在干扰。当GPS卫星正常工作时,会不断地用0和1二进制码元组成的伪随机码(简称伪码)发射导航电文。GPS的系统有两种伪码,一种是民用的C/A码,还有一种是军用的P(Y)码。C/A码频率1.023MHz,重复周期1ms,码间距1us,相当于300m。P码频率10.23MHz,重复周期266.4天,码间距0.1us,相当于30m。而Y码是以P码为基础,保密性能比P码要强。卫星星历、工作状况、时钟改正、电离层时延修正、大气折射修正等信息,是导航电文的组成部分。导航电文是卫星信号解调出的,以50b/s调制在载频上发射的。每个导航电文主帧中有五个每帧长6s的子帧。前三帧各10个字码;每三十秒重复一次,每小时更新一次,后两帧共15000b。遥测码、转换码、第1、2、3数据块为导航电文的主要内容,星历数据是之中最重要的数据。想要得到卫星与用户的距离,只需在接收到导航电文时,提取出卫星时间并将其与自己的时钟作对比便可,再利用导航电文中的卫星星历数据推算出卫星发射电文时所处位置,用户在WGS-84大地坐标系中的位置速度等信息便可得知。
可见GPS导航系统卫星部分的作用就是不断地发射导航电文。然而,由于用户接受机使用的时钟与卫星星载时钟不可能总是同步,所以除了用户的三维坐标x、y、z外,还要引进一个Δt即卫星与接收机之间的时间差作为未知数,然后用4个方程将这4个未知数解出来。所以如果想知道接收机所处的位置,至少要能接收到4个卫星的信号。到达接收机的时间△t,再加上接收机所接收到的卫星星历等其它数据可以确定以下四个方程式。如图1.1所示。

图1.1 GPS定位原理
1.2.2 GPS的构成部分
(1) 空间部分
GPS的空间部分是由24颗工作卫星组成,它位于距地表20200km的上空,均匀分布在6个轨道面上(每个轨道面4颗),轨道倾角为55°。此外,还有3颗有源备份卫星在轨运行。
(2) 地面控制系统
地面控制系统由监测站(Monitor Station)、主控制站(Master Monitor Station)、地面天线(Ground Antenna)所组成,主控制站位于美国科罗拉多州春田市(Colorado Spring)。地面控制站负责收集由卫星传回的讯息,并计算卫星星历、相对距离、大气校正等数据。
(3) 用户设备部分
用户设备部分即GPS信号接收机。其主要功能是能够捕获到按一定卫星截止角所选择的待测卫星,并跟踪这些卫星的运行。当接收机捕获到跟踪的卫星信号后,就可测量出接收天线至卫星的伪距离和距离的变化率,解调出卫星轨道参数等数据。根据这些数据,接收机中的微处理计算机就可按定位解算方法进行定位计算,计算出用户所在地理位置的经纬度、高度、速度、时间等信息。
1.3 课题研究内容与设计安排
GPS接收器系统设计是一套硬件系统与软件系统交互设计的过程。本课题拟采用DSP芯片TMS320F28335为主控制器的GPS系统,并基于此设计该系统的硬件,进而进行软件部分的编程。最终实现利用该GPS接收器,精确获取并显示日期、时间、经度、纬度等卫星信息。
硬件部分:制作并完成一套基于DSP(TMS320F28335)的GPS接收器硬件系统实物,包括系统PCB板、DSP控制系统模块、GPS定位系统模块、TFT显示系统模块、按键交互系统模块、运行状态指示灯模块。其中,电源模块设计采用成熟的电源IC芯片(AMS1117),DSP控制系统采用TMS320F28335作为主控芯片,GPS模块采用u-blox neo-6m GPS模块与配套外置天线,TFT模块采用16位真彩1.44寸TFT模块。
软件部分:编写并完成一套基于TMS320F28335的GPS接收器软件调试系统,包括整个控制系统流程框架代码、DSP控制系统模块与GPS定位模块的通信代码、TFT显示模块控制代码、按键交互系统代码、运行状态指示灯模块代码;
剩余内容已隐藏,请支付后下载全文,论文总字数:29202字
相关图片展示: