论文总字数:22280字
目 录
1 绪论 5
1.2研究概况 5
2 系统方案设计 5
3 硬件设计 6
3.2 中央处理模块 7
3.2.1 stm32最小系统电路 7
3.2.2 stm32定时/计数器 8
3.3电源模块设计 9
3.4 电机驱动模块 9
3.4.1 驱动模块结构及其原理 9
3.5.1 红外传感器 12
3.5.2超声波避障模块 13
3.6循迹模块设计 16
3.6.1 循迹模块结构及其原理 16
3.6.2 循迹模块电路设计 18
3.7红外遥控模块设计 18
3.8 蓝牙控制设计 20
3.9 wifi视频控制 23
3.9.1 WiFi模块设计 23
3.9.2电源电路设计 24
3.9.3 舵机云台的设计 25
4 软件设计 27
4.1 程序仿真 27
4.2 程序下载 27
4.3循迹,红外避障和红外遥控软件设计 28
4.3.1主程序框图 28
4.3.2主程序 29
4.3.3 循迹子程序 31
4.3.4 避障子程序 32
4.3.5 遥控子程序 32
4.4超声波避障软件设计 33
4.4.1 程序框图 33
4.4.2 超声波避障主程序 33
4.5 蓝牙遥控软件设计 36
4.5.1 主程序 36
4.6 WiFi模块软件设计 37
4.6.1 WiFi主程序 37
5 系统调试 39
6 总结 41
参考文献 42
基于单片机的智能小车设计
许靖
,China
Abstract:The design includes STM32 Controller, motor drive circuit, infrared detection circuit, infrared obstacle avoidance circuit, ultrasonic obstacle avoidance circuit, Bluetooth control module, WiFi control module and many other modules, and STM32 as the core processor of Intelligent trolley platform design. Stm32 as the core of the design of the processor, through it to the PWM speed control technology to drive the motor. Use sensors to identify black and white lines. The use of infrared and ultrasonic obstacle avoidance methods to avoid obstacles, and on this basis to develop other expansion functions.
Key words:Stm 32; Infrared detection; Pwm; Motor control
1 绪论
1.1研究背景及意义
随着智能家电时代的到来,它们为人们提供一个舒适的生活环境,同时也提高智能家电门槛制造人员的要求。智能汽车是多种高新技术的集成,它不仅是许多学科,例如电子传感器、计算机硬件、软件和其他知识的整合,也涉及到当今许多前沿技术,它的一个重要体现国家高科技水平。
1.2研究概况
智能车的研究在我国的起步非常晚,大约在上世纪末,而国外早在上世纪中叶就开始了相关技术的研究。智能车辆发展在上世纪末逐渐开始走向成熟。欧美等西方国家在此方面的研究有开创性进展,掌握着这方面的核心技术。它们生产的相关系列的产品成为行业研究的代表方向。我国的智能车辆的研究由于起步晚,能力弱,与西方国家还处在着较大差距。近年来,智能小车等智能机器人在国内成为热门,通过对智能机器人的研究不断地开拓创新,拓展思维,我国的科研能力在不断地提高。智能小车作为智能机器人的一部份,利用此平台可以将不同的功能及知识集合在一起,是对自己各方面的综合考验。
- 系统方案设计
2.1系统设计的任务与要求
- 本次设计是以stm32单片机为核心,以L298N控制的四轮小车平台为基础,采用PWM调速原理控制小车转向并在此基础上实现循迹、避障和遥控等功能。
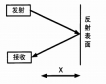
- 循迹模块要求小车能够在白板上按黑线轨迹行驶,黑线设置大概1.5cm宽度。我们采用性价比较高的红外循迹方式,通过调节循迹模块上的电位器来改变灵敏度以达到在黑线上正常循迹。
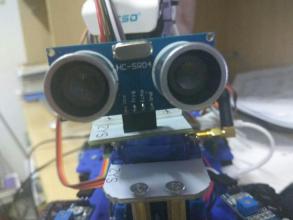
- 避障模块要求能对作为周围障碍物进行识别并能避开障碍物,本次的设计中我们采用的是红外和超声波两种方式。红外避障的探测距离设置在10cm以内作为近距离探测的手段,而超射波避障加装舵机云台实现180°范围内的探测,我们设置探测的距离达到60cm以此作为小车远距离避障的手段。
- 对于小车的遥控,我们需要能够通过按键控制小车的运动。本次设计中除了红外遥控外,我们还加装了蓝牙和WiFi模块。红外遥控部分能够通过红外遥控器进行控制,而蓝牙和WiFi部分能够通过手机匹配到其发出的信号,并通过手机端的APP进行控制。在WiFi部分加装摄像头在手机端可以对周围环境监控。
2.2系统电路总体框图及工作原理
系统将采集的传感器信号送入stm32微控制器中,stm32微控制器根据采集的信号做出不同的判断,从而控制电机运动方向和运动速度。整个系统以stm32作为核心处理器,将传感器采集到的各种信号进行处理和判断,以此来控制电机的速度大小及方向。实验系统结构如图2.1所示:

图2.1 实验系统结构图
3 硬件设计
3.1 系统总体设计
此次设计是以L298N为驱动芯片控制直流电机的四轮小车。在此基础上,我们综合了循迹、避障、遥控等方面知识运用到小车上,实现多功能智能化的操作。
在循迹方面,我们使用红外循迹,利用的是不同颜色对红外光的反射系数不同。因此红外接收管接收光的强弱就不同,并以此通过比较器转换为高低电平传送给处理器。由于本次设计的小车功能较多,处理器上的端口较为紧张,所以我们只采用左右两路循迹安装在小车前方。
避障部分,我们采用的是红外和超声波避障两种模式。红外避障的原理与红外循迹原理相似,我们将红外避障模块安装在小车的左右两侧,和水平方向呈45°左右。在超声波模块中,我们加装了舵机云台,使得超声波能够180°的转向。
小车的遥控部分我们首先安装有红外遥控功能,我们需要在小车上安装一个红外接收管,通过红外遥控器发送控制命令。同时我们还加装了蓝牙和WiFi模块,我们要将端口一一连接,否者可能会烧坏芯片。我们要在手机端安装好蓝牙和WiFi相关的APP。
系统总体框架如图2.1所示:
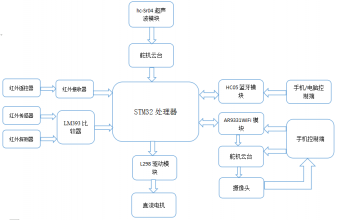
图3.1 系统框架图
3.2 中央处理模块
作为此次设计的核心处理器—stm32单片机,它拥有类似人体大脑功能的作用,就像人类的大脑控制人类进行各种动作,并将从周围获取的各种信息传输给大脑进行相应的判断。Stm32也能够实时处理不同模块所传输的信息,并以此来让小车的驱动模块控制电机完成所需要的任务。
3.2.1 stm32最小系统电路
如下图所示,此单片机主要由系统和实时时钟电路,及与之相关JTAG调试接口与复位电路,单片机的启动模式选择电路等。
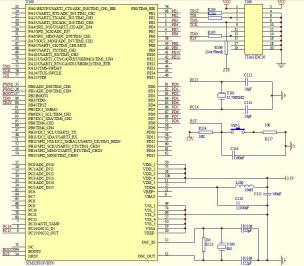
图3.2最小系统电路原理图
JTAG电路原理图如图3.3所示:
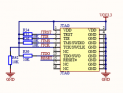
图3.3 JAG电路原理图
3.2.2 stm32定时/计数器
作为Stm32系列的单片机通常包括8个计数/定时器,高级控制定时器TIM1及TIM8,通用定时器由TIM2~TIM5组成,TIM6以及TIM7为基本定时器。
本设计所采用的定时器以及功能如下表所示:
表1定时器介绍表
定时器名称 | 定时器配置模式 | 主要功能 |
TIM2 | 定时器中断模式 | 通过定时器中断,控制超声波的扫描周期 |
TIM3 | PWM复用输出模式 | 控制小车速度及舵机转向 |
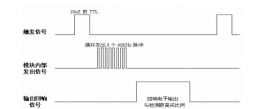
TIM5 | 输入捕获模式 | 采集超声波发射到接受的高电平持续时间t |
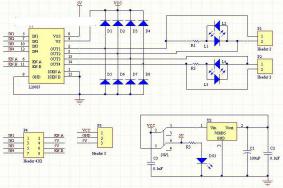
3.3电源模块设计
小车电源模块采用的是两个3.7V的充电电池供电,由78M05作为稳压芯片,PJ2连接电机驱动板来供电。其原理图如图所示:

图3.4 电源模块原理图
3.4 电机驱动模块
此次设计所采用的电机驱动模块的核心为L298N。L298N内部包含了H桥式电路,这也是驱动芯片最常采用的电路。单片机通过控制驱动电路来控制电机运动。
3.4.1 驱动模块结构及其原理
电机驱动模块的实物图如图3.5所示:
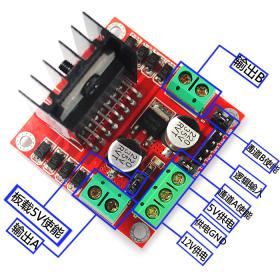
图3.5 驱动电路实物图
电机驱动一般采用H桥式驱动电路,L298N内部集成了H桥式驱动电路,从而可以采用L298N电路来驱动电机。通过单片机给予L298N电路PWM信号来控制小车的速度,起停。其引脚图如图3.6所示:
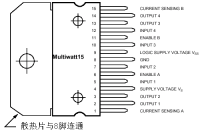
图3.6 L298N引脚图
剩余内容已隐藏,请支付后下载全文,论文总字数:22280字
相关图片展示: