论文总字数:29484字
摘 要
在热工过程中,广泛存在着时滞,比如火电厂的机炉协调控制系统,过热汽温控制系统等。时滞的存在对热工控制系统的性能产生不利影响,特别是当时滞较大,惯性时间较长并且过程对象的动态特性随各种因素的影响而发生变化时,采用传统的控制方法,如PID控制方法,很难获得良好的控制效果,甚至会出现不稳定现象。因此,如何改善大滞后控制过程的控制品质是一个有着较大实际意义的课题。
本篇论文中将大延迟对象作为研究对象,用辨识建模的方法建立大延迟对象的数学模型,然后使用MATLAB软件的Simulink仿真平台对大延迟对象分别投入传统PID控制,Smith预估控制,广义预测控。得到不同控制方式的控制效果图,经过比较后发现,传统PID控制超调量和控制时间都较大,Smith预估控制能有效抑制超调,控制时间上和传统PID控制处于同一水平,但是Smith补偿器的设定对被控对象的模型要求很高,广义预测控制在有效抑制超调的情况下,较前两种控制大幅减少了控制时间,并且对于被控对象采用系统辨识建模,在工程上应用更为方便。因此广义预测控制在大延迟对象控制中有着无法比拟的优越性。
关键词:大延迟,传统PID控制,Smith预估控制,广义预测控制。
A STUDY ON MODERN CONTROL METHODS OF MAIN STEAM TEMPERATURE IN THERMOELECTRIC SYSTEM
Abstract
There are widespread delay problems in thermal processes, such as CCS and superheated steam temperature control system. Delay problems have a bad influence on control systems, especially when the time delay a lot or the system inertias for a long time, or the dynamic characteristics of the process object change easily because of the effects of varieties of factors. Under the conditions above, it is hard for us to get satisfactory effects of control and make the system steady if we use traditional control method like conventional PID control. Therefore, it is a meaningful subject to search for useful methods of improving the quality of control in large time delay systems.
In this paper we will study a large time delay object. We build a mathematical model for the object by identification first. Then we apply three different control methods: conventional PID control, Smith predictive control, generalized predictive control (GPC) to the object through Simulink in MATLAB. We obtain pictures of input-time and output-time. We can see that, when we use conventional PID control, the system has large overshoot and long control time. Differently, Smith predictive control can effectively reduce the overshoot, but the control time is similar to that ahead. The problem is that Smith predictive control need a detailed accurate description for the object, which is hard for engineering. Compared to the two methods, GPC has small or no overshoot, and a very short control time. Moreover, GPC just need the model built by identification, which is easy for engineering. So we can conclude that GPC plays a very important role in large time delay systems.
KEY WORDS: large delay, conventional PID, Smith predictive, GPC.
目 录
摘要………………………………………………………………………………………………1
Abstract ………………………………………………………………………………………… 2
第一章 绪论……………………………………………………………………………………4
1.1选题背景及选题依据…………………………………………………………………4
1.2系统模型建立理论简介………………………………………………………………5
1.2.1 建立数学模型的基本方法………………………………………………5
1.2.2 辨识算法的基本原理……………………………………………………6
1.3大延迟过程的控制方法简介…………………………………………………………7
1.3.1 PID调节器………………………………………………………………7
1.3.2 Smith预估控制…………………………………………………………8
1.3.3 广义预测控制……………………………………………………………9
1.4 MATLAB 软件及其仿真集成环境简介………………………………………………10
1.5本文主要研究内容……………………………………………………………………12
第二章 大延迟对象的传统PID控制…………………………………………………………13
2.1两点法建立热工大延迟对象模型……………………………………………………13
2.2 Z-N 法整定传统PID控制器参数……………………………………………………14
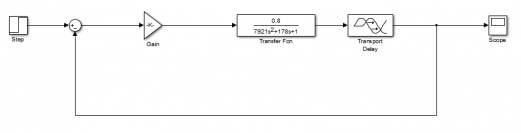
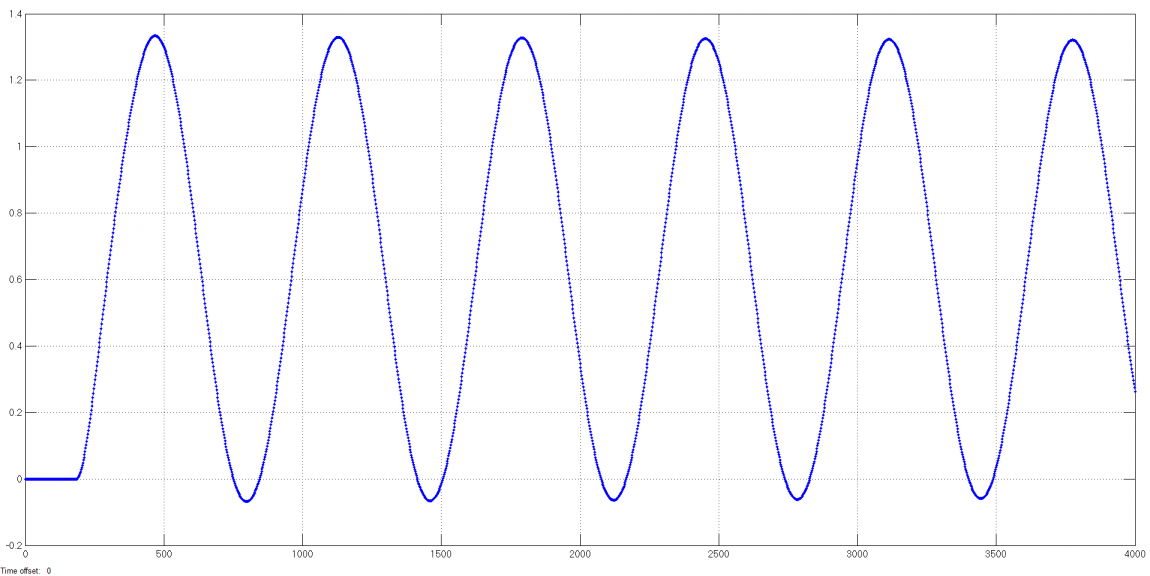
2.3大延迟对象的传统PID控制效果……………………………………………………15
第三章 大延迟对象的Smith预估控制………………………………………………………17
第四章 大延迟对象的广义预测控制…………………………………………………………19
4.1系统辨识算法原理……………………………………………………………………19
4.2基于MATLAB软件系统辨识工具箱的ARX辨识建模………………………………21
4.3广义预测控制算法……………………………………………………………………22
4.3.1 算法推导过程……………………………………………………………22
4.3.2 广义预测控制器的参数选择……………………………………………24
4.4大延迟对象控制的GPC程序设计……………………………………………………25
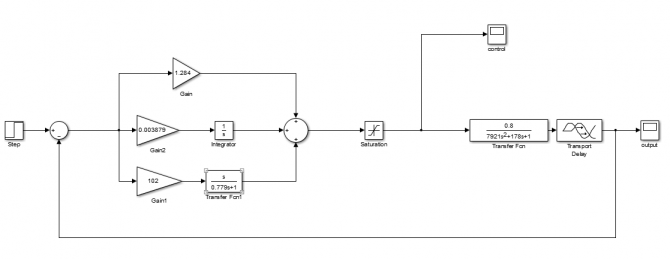
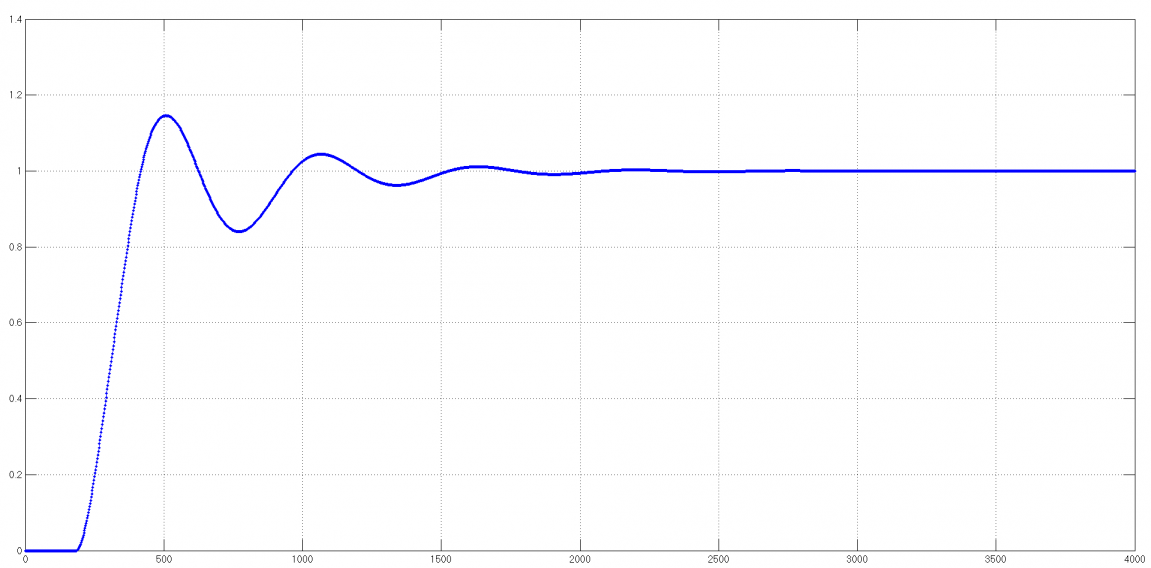
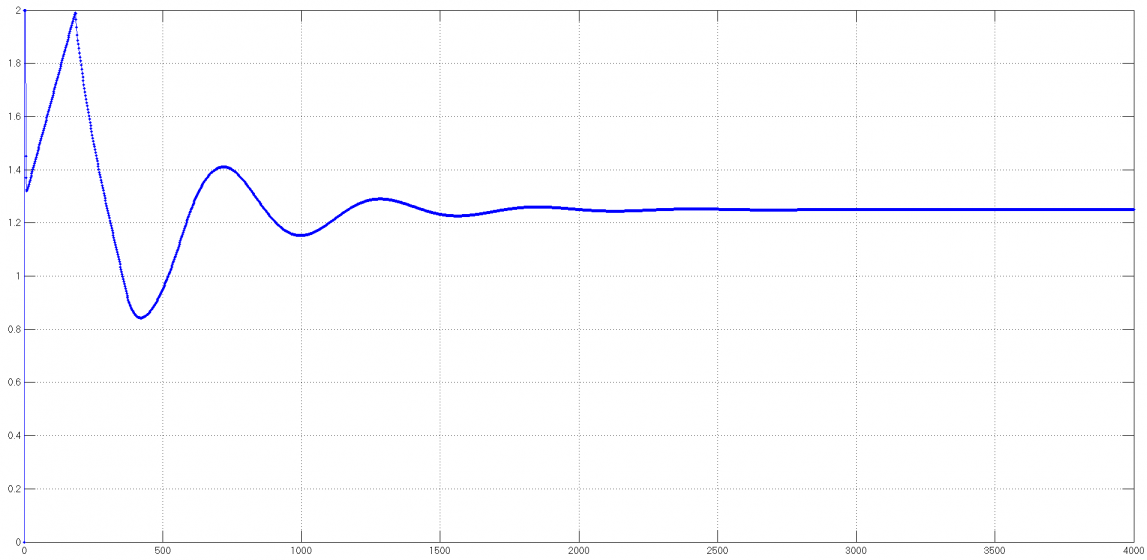
4.5大延迟对象的广义预测控制效果……………………………………………………28
结论………………………………………………………………………………………………29
致谢………………………………………………………………………………………………30
参考文献 (References)………………………………………………………………………31
第一章 绪 论
在电厂的热工过程及其他工业过程的受控过程中,大多存在动态特性的延迟问题。特别是在热工过程,由于机组往大容量、高参数方向发展,大延迟问题越发严重,要解决这一难题,我们得了解什么是大延迟。
所谓大延迟过程,就是当前对过程施加控制(输入信号),需要经过一定的时间后过程输出才会对控制做出反应。一般情况下,对于受控过程的模型,当纯延迟时间τ比上时间常数T大于0.4,即τ/T大于0.4时,则称该对象为大延迟被控对象。热工控制存在很多延迟过程,如机组负荷发生变化时,控制煤粉的输入量来改变功率,因煤粉的传输需要一定的时间,这便导致了延迟;如今热工对象尤其是电厂中普遍存在大设备、大容量、大惯性等特性,这些特性也使得被控参数不能立即响应控制输入而产生延迟。
大延迟所带来的问题,主要在于当系统受到扰动时,被调量不能及时做出反应,这就为控制反馈带来了干扰。纯延迟存在时,忽略调节器自身的反应时间,我们假设测量信号一到达调节器,调节器就立即做出反应,命令调节机关做出相应动作,即便如此,被控对象也要经过纯延迟时间τ以后,才能做出相应的变化。根据大量的研究,大延迟过程的控制难度会随纯延迟时间τ的增加而增加,过程中的相位滞后和超调量会随着τ/T的增加而增加。过长的超调时间和过大的超调量,必定会会增加机组运行的危险程度。
1.1 选题背景及选题依据
现代的大型火力发电生产过程是一个广泛地存在着多变量、非线性、大惯性、参数时变问题的复杂生产过程,它受不确定因素影响大,生产条件及工况变化多样。目前常规的机组控制方案采用基于PID线性控制算法并结合前馈补偿、串级控制的多个SISO反馈控制回路组成的分散控制结构,没有完全考虑上述问题,这样虽然生产过程的平稳运行得到一定程度的保障,但是无法保证长期的正常运行,复杂工况更是需要运行人员大量的手工操作和监督控制,这样不可避免地使机组运行参数偏离经济指标,使设备能量损失增大,增加设备的故障率,机组的经济效益和运行的可靠安全性都难以得到保障。基于先进的控制理论(包括智能控制理论)的发展和计算机控制技术(DCS)日益广泛的应用,研究者纷纷开始应用非常规控制方法对电厂机组控制系统的重新设计和优化。目前,为了解决常规机组控制系统应用中存在的诸多问题,适应电网综合自动化发展提出的越来越高的性能要求,人们对电厂控制对象及其控制方法进行了广泛深入的研究,发掘新思路,提出了许多优秀的控制策略和设计方法。
随着能源危机的逼近,火力发电行业节能已经迫在眉睫,因此为了提高发点效率,减少煤耗,火电机组趋向于大设备、高参数化、大容量方向发展,而因此需要更高的控制精确度,其中大迟延问题一直是电厂控制的一个难点。
针对这个难点,很多种控制算法应运而生,在当今的众多的大迟延控制方案中,PID控制算法是其中最简便的,但由于大迟延系统的精确数学模型很难建立,PID串级控制的控制品质受到了很大的限制。Smith预估控制也是人们研究较多的控制方法之一,不过传统的Simth预估控制对被控对象的模型有很高的要求,否则可能引起控制系统控制品质不好甚至震荡,且要经复杂的计算得出大量参数值,它在对象模型参数确定不变时才能获得比较理想的控制效果。
相较于上述几种控制算法,在预测控制的基础上发展起来的广义预测控制有其独到之处。广义预测控制是80年代产生的一种新型计算机控制方法,它是基于预测控制及自适应控制发展起来的,极具代表性。广义预测控制拥有几个优点,首先它的模型参数较少,因此比自适应控制方法更具有鲁棒性;其次,它采用多步预测的思想,并结合滚动优化和反馈校正等策略,因此能获得较好的控制效果。
1.2 系统模型建立理论简介
模型是各领域研究人员最常谈论的重要科学术语之一。模型(model)的具体定义可以参照文献[9]。
合理有效的模型应是能够正确反映系统表征和内在特性的最简表达,然而任何理想化的模型都不可能无误差地描述实际系统,都只是一个被简化的近似模型。模型建立越精确,那么模型必定会变得越复杂,反之亦然。这就是说,建立实际系统的模型时,模型的精确性和复杂性是相互矛盾而存在的,如何在这两者之间寻求平衡是建立系统模型的关键。
模型的分类[9]:
1)直觉模型。
2)物理模型。
3)图表模型。
4)数学模型。
本文章中将采用数学模型来描述大延迟对象的控制过程。
1.2.1 建立数学模型的基本方法
1)机理分析法
通过分析系统的运动规律,应用一些已知的定律、定理与原理,利用数学方法进行推导,建立起系统的数学模型,这种方法就是机理分析法,也称为理论建模。
2)系统辨识法
在工程中研究的对象往往是比较复杂的,很难对其内部的机理研究透彻或是精确描述,这就对机理分析法产生了限制。不同于机理分析法,系统辨识法是通过对系统输入和输出数据关系的研究来建立系统的模型,一般情况下系统的输入和输出信号都是可以测量的,而且系统的动态特性必定能够反映在这些数据之中,这正是系统辨识法所依据的。
3)混合法
机理分析法适用于简单系统的建模,并要求对系统的机理有足够清晰的了解。因为实际的工业过程是极为复杂的,很难对其过程有清晰的认识,所以这种方法存在很大的局限性。在理论建模时,为了使后续研究以及计算不至于太复杂,我们必须对研究对象提出合理的简化假设,但是这些假设往往是理想的,是与实际情况不符的,这会使得模型与实际系统之间存在较大的误差。
与机理分析法相比,系统辨识法则无需对系统内部原理完全了解,但所用的输入输出数据必须能够完全反映系统特性,这也往往是比较困难的。
剩余内容已隐藏,请支付后下载全文,论文总字数:29484字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

