论文总字数:32220字
摘 要
本论文应用VISSIM建立高速公路互通立交交通冲突仿真模型和SSAM交通冲突分析软件对高速公路立交匝道交通冲突进行机理研究,旨在分析在一定道路交通环境下,互通立交交通冲突的产生原因和内在规律。本文主要的研究内容包括交通运行特征分析、功能区范围界定、交通冲突分类以及交通冲突机理分析等。通过VISSIM仿真路段交通流特性,界定高速公路匝道功能区影响范围;结合VISSIM仿真模型和SSAM交通冲突分析技术从交通流特性及道路几何特征两个方面分析产生冲突的原理及影响因素。作为互通立交交通冲突分析的理论基础,通过高速公路互通立交交通冲突机理的研究,为交通安全、交通冲突技术发展奠定基础。
关键字:互通立交;交通冲突机理;功能区影响范围;交通流特性
Abstract
In this paper, VISSIM and SSAM (traffic conflict analysis software) were used to establish highway interchange traffic conflict simulation model and run Expressway Interchange Ramp Traffic Conflict mechanism research in order to analyze under certain road traffic environment, the interchange traffic conflict generated reasons and internal rules. The main contents of this paper include the analysis of traffic characteristics analysis, the scope definition of the function area, the traffic conflict classification and the mechanism of traffic conflict, etc. By VISSIM simulation of traffic flow characteristics, define the influence range of freeway collision. Combined with VISSIM simulation model and SSAM traffic conflict analysis technology, the traffic flow characteristics and road geometric features two are analyzed from the principle and influencing factors of conflict. As the theoretical basis of traffic conflict analysis of interchange, the research on traffic conflict mechanism of highway interchange is the basis for the development of traffic safety and traffic conflict technology.
Keywords: Interchange; traffic conflict mechanism; function area influence range; traffic flow characteristic
目录
第1章 绪论 1
1.1 论文背景 1
1.2 国内外研究现状 1
1. 国外研究概况 2
2. 国内研究现状 6
1.3 国内外研究总结 8
1. 国内外可借鉴的成果 8
2. 国内外研究存在的不足 8
1.4 研究内容 9
1. 论文主要内容 9
2. 论文组织架构和技术路线 10
第2章 互通立交交通流仿真 12
2.1交通模型参数标定 12
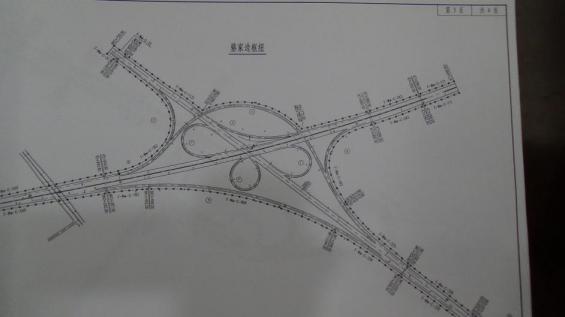
2.2 高速公路互通交通模型 13
1. 交织区交通模型 13
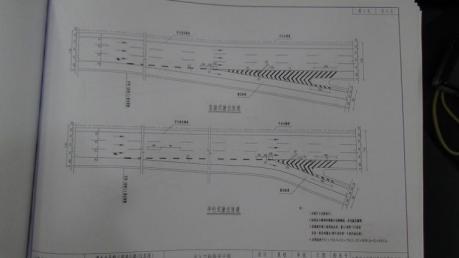
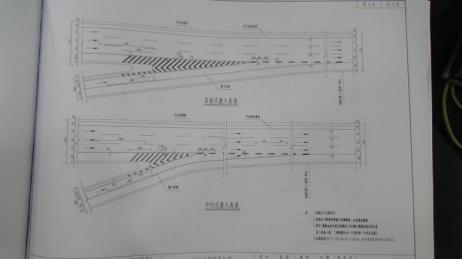
2. 合流区交通模型 14
3. 分流区交通模型 15
2.3仿真模型运行结果 15
1. 禄口南-低交通量比模型 17
2. 将军山-高交通量比模型 18
2.4本章小结 18
第3章 功能区影响范围划分 20
3.1 交织区冲突影响范围研究 20
1. 禄口南交织区交通模型 20
3.2合流区吃冲突影响范围研究 21
3.3分流区冲突影响范围研究 22
3.4本章小结 23
第4章 功能区与交通冲突关系 24
4.1 交织区冲突类别 24
4.2 进出口匝道冲突类别 26
第5章 交通冲突产生机理分析 29
5.1 严重性评价参数标定 29
1. TTC取值研究 30
2. TTC取值为4s,PET取值 30
5.2 SSAM交通冲突分析类型 30
1. 追尾冲突 30
2. 变化车道冲突 30
3. 冲突角划分 30
5.3 功能区交通冲突种类及严重性分布 30
1. 交织区 30
2. 合流区 30
3. 分流区 30
5.4交通冲突影响因素 30
1. 交织区长度 30
2. 交织区构型 30
3. 交通流 30
4. 交通构成 30
5. 交织比、分合流比 30
5.5 本章小结 30
第6章 总结 30
1. 论文意义 30
2. 研究成果和创新性 30
3. 研究不足和展望 30
参考文献 30
绪论
1.1 论文背景
本论文选题源于国家科技支撑计划课题“高速公路行车条件提升关键技术及装备研发(课题编号:2014BAG01B01)”,论文重点研究如何划分互通立交交通冲突类型、从设计参数、交通流参数等方面分析影响交通冲突的因素。
高速公路在国家经济社会发展中起到重要支撑作用,其发展水平反映了国家经济实力与活力。到2014年底,中国高速公路通车总里程达到11.2万公里,已超过美国跃居世界第一,但是高速公路交通事故却具有多发性、高死亡率和直接经济损失严重等特点,所以高速公路交通安全研究具有重要的意义。
互通立交作为高速公路路网节点,其运行状态影响高速公路网的整体水平。据统计,京津塘高速公路2002-2004年互通立交发生的事故数占总事故数的14%,沈大高速公路2005年在26 座互通立交发生的事故数有170起,占交通事故总数的34%。互通立交交通安全通顺与整个高速公路路网的安全和运营状况有深远影响。
交通事故的发生是人、车、路、环境等因素共同作用的结果。除了不规范的驾驶行为外,道路设计指标的不合理是导致交通事故的客观原因。设计员在保证设计指标满足规范条件下,尽量减少建设成本,没有充分考虑车辆行驶的安全性。互通立交是交织区、分、合流区以及匝道的多形式组合,复杂的道路条件和交通流特性导致了互通立交车辆运行状态的复杂性。目前研究尚对互通立交交通流的运行特征对交通安全的影响,道路条件对交通安全的影响缺乏系统的、清晰的认识。
本文根据交通冲突理论,对高速公路互通立交交通冲突产生的机理分析,旨在找出冲突产生的影响因素。着重于研究互通立交功能区的道路设计指标和交通流特征对不同类别交通冲突产生的影响,初步确定影响互通立交交通冲突的关键指标,为建立功能区冲突模型以及交通安全评价奠定理论基础。
1.2 国内外研究现状
目前国内外对互通立交交通安全的研究主要集中于:对互通立交安全基于交通事故的安全诊断技术、安全评价技术和安全改善方法,交织区、分、合流区以及匝道等部分道路几何与交通冲突的影响关系,交通冲突技术的可靠性分析,交通冲突的测量技术改善等。针对本项目的研究内容,对国内外文献进行梳理,从互通立交交通安全研究和交通冲突技术两个角度总结研究成果,为论文的展开提供研究思路和提供经验借鉴。
国外研究概况
- 互通立交交通安全研究
Bauer 和 Harwood[[1]](1998)、Bonneson等[[2]](2005)通过研究得出:年日均交通量AADT(主线、匝道)、地区类型(城市、乡村)、匝道类型(进口、出口)、匝道构造形式(环形、定向形)、变速车道、交织段长度等是影响匝道交通安全的重要因素。Chen等[[3]](2009)提出出口匝道与主线连接区域若违反车道平衡,事故发生几率将显著增加。美国州公路及运输协会(AASHTO)[[4]](2004)在一项指导方针中也强调了保持车道平衡的重要性,并且出入口匝道应设置在右侧以符合驾驶员预期。
Sadia, R等[[5]](2012)针对互通式立交以有限的区域承载巨大交通量的特点,认为应减少驾驶员通过该区域的负担,提出“立交复杂程度”(与立交方向的数量、车道平衡情况、进出口数、定向性转向数等有关)这一指标,基于此建立预测总驾驶员负担的“互通立交复杂度模型”,并与互通立交交通事故数建立关联,经验证效果良好。
此外,美国关于立交区域标志标线的使用研究成果集合于“交通控制设施一致性手册” (FHWA 2009)[[6]];基于回归分析的交通事故预测模型,成果集合于“公路安全手册” (AASHTO 2010)[[7]]。结合其他各方面的标准规范,共同组成了美国的公路安全评价与设计体系,但由于发展模式、地域情况等的差异,美国的研究成果显然不直接适用于我国。在我国交通事故数据库建设不完备的背景下,需要探究适合我国国情的互通立交交通安全评价、设计方法。
Liapis等 [[8]](2001)通过对希腊20处立交被交公路匝道曲线部分的交通流和几何设计参数观测,研究了该处驾驶行为特征,得出了匝道曲率明显影响事故率与运行速度变化的结论,并指出澳大利亚、德国、希腊在公路设计中运行速度的确定方面有相似之处,可互相借鉴。
2004年英国率先对不同类型立交形式进行安全水平研究。在伦敦-伯明翰的一条高速公路以及若干城市环道上,通过为期一年的不同类型的立交事故研究中,得出半苜蓿叶类型的立交桥事故数量大于完全互通的立交类型[[9]]。
Montella, A等[[10]](2008)通过对意大利那不勒斯-卡诺沙A16高速公路2001-2005年发生的2245次事故(包含728次严重事故)数据分析。利用广义线性回归函数和负二项分布函数建立了基于交通量,交通组成,平、纵、横线形,设计一致性,视距,路边状况,速度限制,立交匝道等方面考虑的模型,并得出了设计一致性在高速公路与在双车道公路一样,都对交通安全有重要影响的结论。
Manner, H等[[11]](2013)分析德国北莱茵-威斯特法伦州高速公路2009-2011发生的严重交通事故数据,利用多项分对数模型描述各影响因素与交通安全的关系,将事故等级分为四级:致命、重伤、轻伤、财产损失。并在模型中引入随机参数,以补偿未考虑因素的影响。得出的结论是:在互通立交及类似构造物、白天发生的事故严重程度较之与路边固定物、行人碰撞事故严重程度要小。
- 交通冲突技术
传统采用交通事故统计法评价交通安全,具有评价精度较高、有说服力等优点,但此类评价方法具有“小样本、长周期、大区域、低信度”的局限性。因此,在交通事故数据不完备的情况下,基于非事故的交通安全评价方法逐渐成为研究热点,其中交通冲突技术以“大样本、短周期、小区域、高信度”的统计学优势实现了广泛的应用。
交通冲突技术是国际交通安全领域从20世纪中叶以来逐步开发的非事故统计评价理论,该技术以大样本生成,快速、定量研究评价交通安全现状与改善效果的特点而异于传统的事故统计评价理论,以至于在1990年的第三届国际交通冲突技术研究会的宣传资料上,提出了“以交通冲突技术代替事故统计进行交通安全评价”的口号[[12]],客观反映了交通冲突技术的迅猛发展。
在交通冲突的定义方面,基本形成了一致的认识。Perkins等[[13]](1968)年首次提出基于规避行为判断的交通冲突定义,即交通冲突的判别依据是驾驶人员是否做出了规避交通事故的行为,并在研究中予以应用。Parker等[[14]](1989)进一步明确该定义,提出:涉及两个或两个以上的道路使用者,在一个驾驶人员的行为导致其他驾驶员作出规避行为,以避免碰撞的交通事件被称为交通冲突。对于此类定义,如果事故规避行为可被检测,那么交通冲突也就被确定。
Amundsen等[[15]] (1977)提出基于车辆接近程度判断的交通冲突定义:有两个或两个以上的道路使用者在空间和时间上相互接近,以至于如果他们的运动保持不变,将会有碰撞的风险。为了定量的分析交通冲突,许多学者采用了不同的度量指标如:如Hayward [[16]](1971)年提出的Temporal proximity Time to collision (TTC)——距离碰撞时间, Cooper [[17]](1984)提出的post encroachment time (PET)——后侵占时间,Hydén[[18]] 1987提出的time to accident (TA) 距离事故时间。
- 交通仿真技术
VISSIM 的交通流模型是一个基于时间的、离散、随机的微观模型,它以驾驶员-车辆-单元为基本实体,其导出的.trj可导入SSAM软件分析得出交通交通数据。该模型的车辆纵向行为是根据生理-心理跟车模型,而车辆的横向行为是根据基于车道的算法。该模型是以Wiedemann 先后发表的论著为理论基础的。
Wiedemann 模型的基本观点是:可以把驾驶员的行驶状态分为四种类型:
- Free driving(自由驾驶):后车驾驶行为不受前车的影响。此种驾驶模式下,驾驶员努力达到并维持一定的车速(期望车速)。实际上,此时的车速很难保持恒定,而是在期望车速附近摆动。
- Approaching(接近):后车驾驶员减慢车速,以适应前车的车速。当后车接近前车时,后车驾驶员刹车减速以便到达他的期望安全距离,此时,前后车的速度差为“0”。
- Following(跟随):后车驾驶员跟随前车,没有意图加速或是减速。后车驾驶员基本保持恒定的与前车的安全距离,实际上,由于油门控制和驾驶判断上的误差,前后车的速度差在0 附近摆动。
- Braking(刹车):当前后车间的距离小于期望安全距离时,后车驾驶员刹车减速,减速度从中等达到最大值。这种情况发生在:⑴前车车速突然变化 ⑵后车前方的第三辆车变化车道。
对于每一种驾驶模式,后车的加速度由前后车的车速和速度差,前后车间的距离以及驾驶员和车辆的个性特征所决定。当驾驶员达到了某个以速度差和距离表达的阈值时,他将从一种驾驶状态转换到另一种驾驶状态。例如,比较小的速度差只有在近距离车辆间才会对驾驶行为产生影响,而当前后车的速度差较大时,后车驾驶员必须在接近前车时更早的采取行动。不同驾驶员群体感知速度差和估计距离的能力不尽相同,他们的期望车速和安全距离也存在差异。由于Wiedemann 模型综合考虑了驾驶员的心理和生理上的感知限制,故称其为生理-心理跟车模型。主要分析指标有:
- 前视距离:定义了车辆前方的可视距离,从该距离开始,后车驾驶员能够对在同一路段内的前方或旁边的车辆(在同一路段上)做出反应。该参数是对观察到的车辆数量的补充。
- 观察到的车辆:影响路网中的驾驶员如何预测其它车辆运行以及做出相应反应的能力。由于一些路网元素(比如慢行区域,信号控制)在程序内部是以车辆的形式建模的,因此建议,如果路网中短距离内存在几个交叉口以及这些路网元素的话,有必要增加该数值。但是,数值越大,仿真速度越慢。
- 后视距离:定义了车辆后方的可视距离,车辆可以对该距离之内的车辆作出反应(在同一路段上)。
- 暂时走神(“睡觉”参数):后车驾驶员在一段时间内不对前车的驾驶行为做出反应(除了紧急刹车)。
- 持续:“精神不集中”的持续时间。
剩余内容已隐藏,请支付后下载全文,论文总字数:32220字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

