论文总字数:31941字
摘 要
机器人是时下比较热门的一个话题,大到探月机器人,小到生活中的扫地机器人。可以预估得到,未来的地球会有越来越多的机器人,也有很多种类。而足球机器人是研究的常用对象,另外RoboCup人形足球机器人是现今RoboCup比赛的重头戏。它像真人一样通过视觉来判断比赛中的各类情况,比如射门、防守等,它体现了人类对于自动化世界的期待。鉴于人形机器人参与比赛的前提是很好地对彩色图像进行处理以及自身的精确定位,所以,本课题选择的是对RoboCup人形机器人所需的视觉定位系统进行研究。
本文重点探究了有关RoboCup足球机器人自身定位及其相关的视觉系统问题 机器人定位对于RoboCup比赛是很重要的,定位的好坏与否直接影响着比赛,其中定位方法多种多样,选择一种适合的定位方法也是定位成功的关键,另外通过视觉来进行定位无疑是对视觉处理有着很高的要求。论文研究内容主要集中在以下三个方面:
机器人定位对于RoboCup比赛是很重要的,定位的好坏与否直接影响着比赛,其中定位方法多种多样,选择一种适合的定位方法也是定位成功的关键,另外通过视觉来进行定位无疑是对视觉处理有着很高的要求。论文研究内容主要集中在以下三个方面:
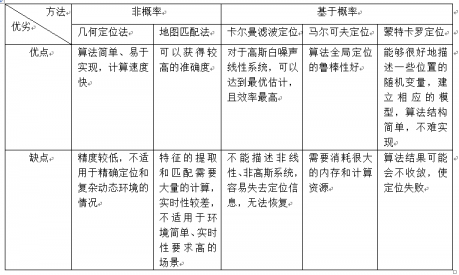
(1)机器人自定位方法很多,通过分析和比较各个方法,得出本课题所使用的自定位方法——几何定位法。
(2)视觉处理对于定位系统有着决定性作用,本文确定了以YUV为颜色空间模型、颜色阈值分割算法作为图像分割和连通域标记算法进行目标识别。
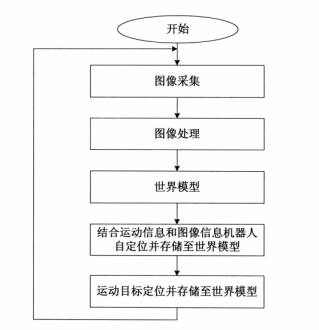
(3)机器人自定位。首先对摄像机进行标定,得出摄像机内、外参数模型,然后测出目标的局部坐标,最后利用机器人与目标的空间几何关系转换得出机器人自身的位姿。
通过实验研究,比较测得的数据,得出所用的视觉识别算法和自身定位所用的几何定位法是可行的。
关键词: RoboCup人形机器人、视觉处理、颜色阈值分割、目标识别、机器人自定位、几何定位法
RESEARCH oN viSIoN-BASED LoCALIZATIoN SYSTEM FoR RoboCup Humanoid RoBoT
Abstract
Nowadays the robot is a hot topic, such as the lunar exploration robot, small like life sweeping robot. It can be estimated that the future of the earth will have more and more robots, there are many kinds of. One of the research objects of the robot is soccer robot. RoboCup humanoid soccer robot game is the RoboCup highlights. It wants to judge all kinds of situations by visual means, such as shooting, defending, etc., which reflects the expectation of the world of automation. In view of the assumption that the human robot is involved in the competition, it is well to process color image and its precise positioning. So, this thesis chooses the visual positioning system for the RoboCup humanoid robot.
This paper mainly discusses the problem of robot localization and robot related visual system in RoboCup soccer robot. Robot localization for the RoboCup competition is very important of, location is good or bad or not directly affects the competition, one of positioning methods varied, choose a suitable location method is successful positioning of the key, beyond the visual to carry out the positioning is undoubtedly a very high demand for visual processing. The major contents of this paper include in the following three aspects:
(1)There are many robot self-localization methods. By analyzing and comparing each method, this paper obtains the method of self-localization - Geometrical positioning method.
(2) Visual processing for positioning system has a decisive role, this paper identified in YUV color space model, color threshold segmentation algorithm as the image segmentation and connected region labeling algorithm for target recognition.
(3) The robot self-localization. first of all the camera calibration, inside and outside parameter model of the camera is obtained. Then measure the local coordinates of the target. At last, the robot's pose is obtained by the space geometry relationship between the robot and the target.
Through experimental study, comparing the measured data, it is concluded that the visual recognition algorithm and the geometric positioning method used in the self-localization are feasible.
KEYWORDS: RoboCup Humanoid Robot, Visual Processing, Color Threshold Segmentation, Target Recognition, Robot Self-localization, Geometric Positioning Method
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 研究背景及意义 1
1.2 RoboCup足球机器人国内外研究现状 1
1.2.1 国外研究现状 1
1.2.2 国内研究现状 2
1.3 RoboCup人形机器人视觉系统概述 3
1.4 本课题的主要研究内容 4
第2章 人形机器人视觉定位方法 5
2.1 概率定位法 5
2.1.1 卡尔曼滤波定位 5
2.1.2 马尔可夫定位 5
2.1.3 蒙特卡罗定位 5
2.2 非概率定位法 6
2.2.1 几何定位法 6
2.2.2 地图匹配法 6
2.3 定位方法比较与选择 6
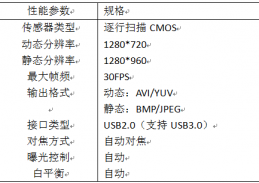
2.4 软硬件平台说明 7
2.4.1 图形采集传感器 8
2.4.2 核心处理器 9
2.4.3 操作系统 9
2.5 本章小结 10
第3章 人形机器人视觉系统设计 11
3.1 引言 11
3.2 图像获取 12
3.2.1 图像采集 12
3.2.2 颜色模型 12
3.2.2.1 RGB颜色模型 12
3.2.2.2 YUV颜色模型 13
3.2.2.3 颜色模型选取 13
3.3 图像分割 13
3.3.1 基本方法 14
3.3.2 彩色图像分割 14
3.4 图像识别 15
3.4.1 色块描述 15
3.4.2 球场要素识别 16
3.5 本章小结 17
第4章 球场目标定位及机器人自身定位 18
4.1 摄像机标定 18
4.1.1 摄像机的内外参数模型 18
4.1.2 基于线性模型的摄像机标定 20
4.2 球场目标定位 21
4.2.1 几何定位 21
4.2.2 摄像机坐标系到机器人坐标系的转换 25
4.3 机器人自定位 26
4.4 实验结果与分析 27
4.4.1 主要函数代码 27
4.4.2 视觉处理 33
4.4.3 几何定位 34
4.5 本章小结 36
第5章 实验拓展 37
第6章 总结与展望 42
6.1 研究工作总结 42
6.2 展望 42
参考文献 43
致谢 45
绪论
研究背景及意义
机器人是时下比较热门的一个话题,大到探月机器人,小到生活中的扫地机器人。可以预估得到,未来的地球会有越来越多的机器人,也有很多种类。而这些机器人中的一种是研究的常用对象,它就是足球机器人。而RoboCup人形足球机器人是现今RoboCup比赛的重头戏。它想真人一样通过视觉来判断比赛中的各类情况,比如射门、防守等,它体现了人类对于自动化世界的期待。鉴于人形机器人参与比赛的前提是很好地对彩色图像进行处理以及自身的精确定位,所以,本课题选择的是对RoboCup人形机器人所需的视觉定位系统进行研究。
同时,我校即将参加RoboCup足球机器人比赛,对此,提前研究RoboCup人形机器人视觉定位系统可以为即将来临的比赛做好准备以便能获得好的成绩。
RoboCup足球机器人国内外研究现状
2050,机器人会同人类足球世界冠军队进行足球比赛,为了实现这个伟大的梦想,在1997的第一届RoboCup比赛、会议在日本名古屋举行,从而迈开了坚实的第一步。RoboCup这一研究组织机构是完全国际性质的,其目的在于探索、研究人工智能和智能机器人技术,得到了世界各高校及国内外学术界的深切重视。 经历了这十几年的发展后已然成为了现今参加人数最多、级别最高、影响最广和规则最完全的足球机器人国际性比赛;与此同时,RoboCup联合会包含超过30个成员国,这自然是成为世界上最有影响力的,最大的机器人足球组织。[1]
经历了这十几年的发展后已然成为了现今参加人数最多、级别最高、影响最广和规则最完全的足球机器人国际性比赛;与此同时,RoboCup联合会包含超过30个成员国,这自然是成为世界上最有影响力的,最大的机器人足球组织。[1]
国外研究现状
人形机器人因其集成了机械设计、机器视觉及人工智能等多方面技术而自然地作为了同人类实现足球比赛的最好形式。人形机器人足球比赛项目正式设立于2002年RoboCup机器人足球世界杯上。在RoboCup机器人足球比赛规则中,机器人不允许人们进行干预和操作,只能用摄像机来感知环境,独立完成游戏项目,所以富有挑战性,也最能体现团队水平。目前,RoboCup人形机器人足球比赛所允许参赛的机器人为双足仿人型机器人,因机器人大小各异,所以被分作小型组、中型组和成人组三个级别,其中小型组别的比赛规则最为完善,技术最为突出。随着日益丰富的赛事,越来越激烈的竞争和严格的制度和完善,RoboCup成为提高人工智能和智能机器人水平的强大动力。机器人足球的研究水平不仅是衡量一个国家科学研究的水平,也表明这个国家的潜在力量,自然会促进国家的重视和对科学技术的投入,同时也将促进相关学科的发展。从2003年起,日本大阪大学球队开始参加RoboCup人形组的比赛,并一直处于领先地位,曾多次荣获机器人足球世界冠军。目前,日本鉴于企业界和学术界的大力支持而直接占据着领先地位,同样,德国、俄罗斯 美国等一些国家也发展迅速。[2]
美国等一些国家也发展迅速。[2]
在2008年,中国苏州举行的RoboCup机器人足球世界杯, 队来自德国波恩大学,击败大阪日本队,夺得世界杯冠军。德国队获胜关键在于其采用三个广角摄像头相对于其他球队获得更加完全的环境讯息,使得机器人在运动场没有任何盲区,另一方面,德国队使用YUV颜色空间模型进行机器人的图像处理,彻底改善颜色识别这一步的稳定性,更好地识别出图像各种信息,并在定位方法第一次过滤的蒙特卡罗定位方法,以便于机器人更准确的进行自身的目标。然而在2009年RoboCup世界杯上,一只队伍否定了这一系列的优势,那就是德国达姆施塔特工业大学
队来自德国波恩大学,击败大阪日本队,夺得世界杯冠军。德国队获胜关键在于其采用三个广角摄像头相对于其他球队获得更加完全的环境讯息,使得机器人在运动场没有任何盲区,另一方面,德国队使用YUV颜色空间模型进行机器人的图像处理,彻底改善颜色识别这一步的稳定性,更好地识别出图像各种信息,并在定位方法第一次过滤的蒙特卡罗定位方法,以便于机器人更准确的进行自身的目标。然而在2009年RoboCup世界杯上,一只队伍否定了这一系列的优势,那就是德国达姆施塔特工业大学 代表队只有一个安装在机器人上的摄像机获得冠军。关键是团队设计的结构化的状态空间模型的同时,机器人拥有快速稳定的步态,从而弥补了机器人所存在的对于视野狭隘的缺陷。
代表队只有一个安装在机器人上的摄像机获得冠军。关键是团队设计的结构化的状态空间模型的同时,机器人拥有快速稳定的步态,从而弥补了机器人所存在的对于视野狭隘的缺陷。
国内研究现状
我国从2006年才开始对RoboCup人形机器人进行研究、探索,近年来成绩相对突出的是来自清华大学的 火神
火神 队以及浙江大学的
队以及浙江大学的 队。其中,清华大学
队。其中,清华大学 火神
火神 队获得了2008年teen-size组的亚军,而且时隔一年之后在2010年获得了季军。 另一只
队获得了2008年teen-size组的亚军,而且时隔一年之后在2010年获得了季军。 另一只 代表队则更是独孤求败,它连续3年蝉联了中国公开赛冠军,并且在2012年的足球世界杯中获得了第二名的优异成绩
代表队则更是独孤求败,它连续3年蝉联了中国公开赛冠军,并且在2012年的足球世界杯中获得了第二名的优异成绩 2013年,北京信息科技大学
2013年,北京信息科技大学 队(图1-1)代表中国出战,在荷兰埃因霍温举办的RoboCup机器人足球世界杯上表现出色,成为了这届世界杯的最大黑马,在中型组决赛中以3∶2仅一球优势击败了东道主荷兰的埃因霍温科技大学队而惊险夺冠;同时在该届世界杯小型组方面,浙江大学
队(图1-1)代表中国出战,在荷兰埃因霍温举办的RoboCup机器人足球世界杯上表现出色,成为了这届世界杯的最大黑马,在中型组决赛中以3∶2仅一球优势击败了东道主荷兰的埃因霍温科技大学队而惊险夺冠;同时在该届世界杯小型组方面,浙江大学 (图1-2)足球机器人球队喜获小型组冠军,浙江大学足球机器人球队也终于圆梦获得了RoboCup小型组世界冠军的头衔。 2014年7月25日,RoboCup机器人足球世界杯小型组决赛对决中,浙江大学队以2:0的最终比分强势击败美国卡内基梅隆大学队,
(图1-2)足球机器人球队喜获小型组冠军,浙江大学足球机器人球队也终于圆梦获得了RoboCup小型组世界冠军的头衔。 2014年7月25日,RoboCup机器人足球世界杯小型组决赛对决中,浙江大学队以2:0的最终比分强势击败美国卡内基梅隆大学队, 球队同时也成功卫冕。
球队同时也成功卫冕。

北京信息科技大学“Water”队

浙江大学ZJUNlict
RoboCup人形机器人视觉系统概述
最开始,计算机视觉的研究主要集中在对相关的低层视觉信息处理的理解方面 当时大家都是普通性认为,人们对于低层次的视觉处理需要使用到具有先验知识的景物和启发式知识来加以指导研究。后来,麻省理工学院(MIT)人工智能(AI)实验室著名机器人视觉教授David Marr教授对于描述视觉机理提出了一个比较系统的理论,该理论实质是立足于计算机科学的,进一步系统地总结了在心理生理学以及神经科学所取得的相关重要成果。同时,这也是目前为止视觉研究中相比之最完善的一个视觉理论。
当时大家都是普通性认为,人们对于低层次的视觉处理需要使用到具有先验知识的景物和启发式知识来加以指导研究。后来,麻省理工学院(MIT)人工智能(AI)实验室著名机器人视觉教授David Marr教授对于描述视觉机理提出了一个比较系统的理论,该理论实质是立足于计算机科学的,进一步系统地总结了在心理生理学以及神经科学所取得的相关重要成果。同时,这也是目前为止视觉研究中相比之最完善的一个视觉理论。
剩余内容已隐藏,请支付后下载全文,论文总字数:31941字
相关图片展示:


该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

