论文总字数:18062字
目 录
1 绪 论 1
1.1 引言 1
1.2 设计的国内外研究现况 1
1.3 设计的主要背景和意义 4
1.4 本文内容及结构 5
2 四轴飞行器系统的原理 6
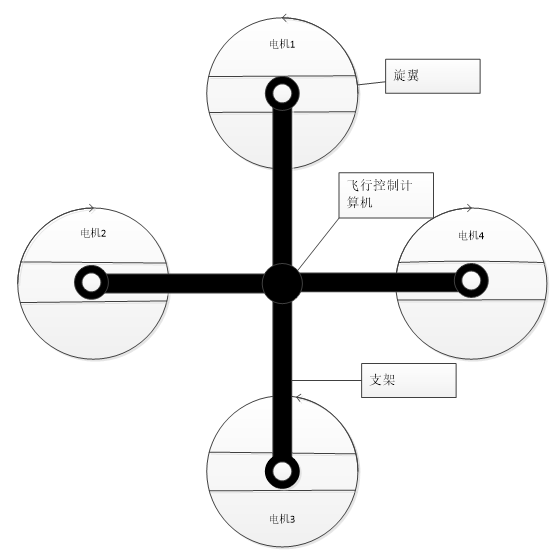
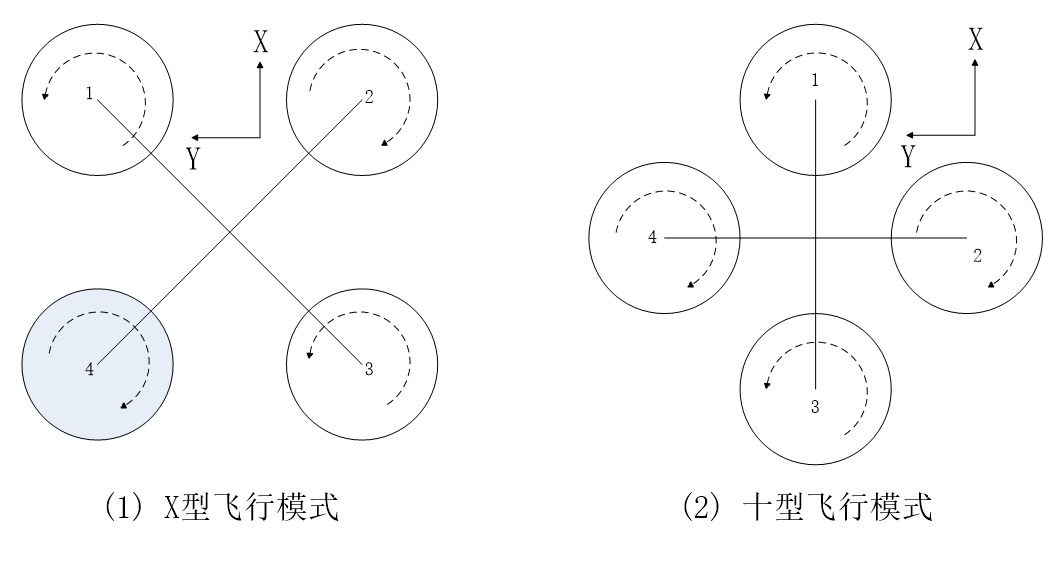
2.1 四轴飞行器结构框架 6
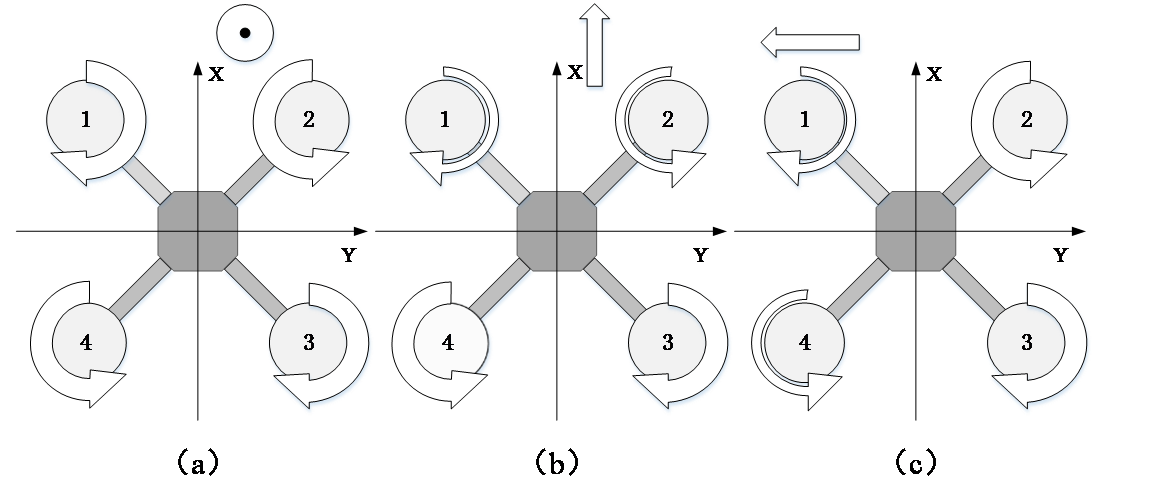
2.2 四轴飞行器动力学分析 6
2.3 本章小结 8
3 硬件系统设计 9
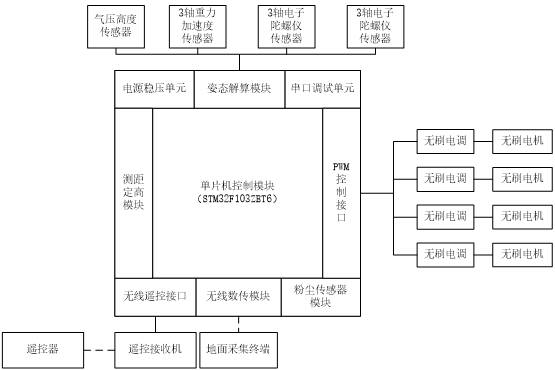
3.1 整体架构介绍 9
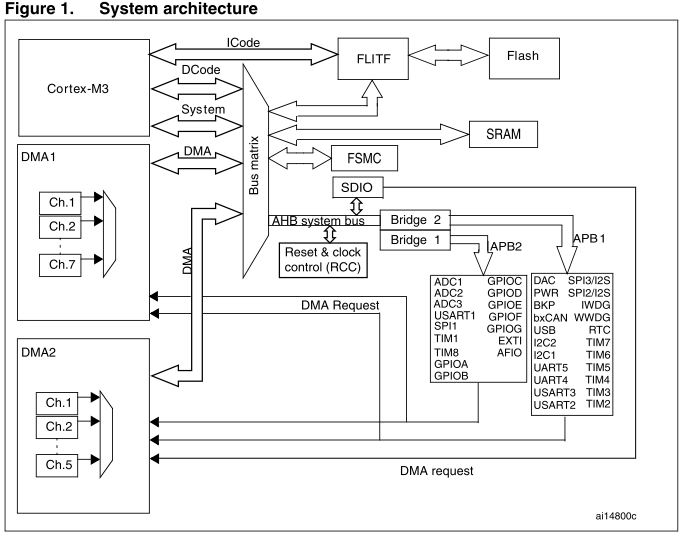
3.2 控制器芯片STM32F103ZET6 10
3.3 姿态检测模块 12
3.3.2 GY-86模块 14
3.4 遥控模块 18
3.5 地面数据显示模块 19
3.6 粉尘传感器模块 21
3.7 本章小结 22
4 软件系统设计 23
4.1 软件系统总体设计 23
4.2 姿态解算 24
4.3 姿态控制算法 26
4.4地面数据显示程序 27
4.5 PM2.5测量程序 28
4.6 本章小结 29
5 系统功能测试及结果分析 30
5.1 遥控器PWM测试 30
5.2 姿态解算测试 30
5.3 PID控制器参数调整测试 31
5.4 PM2.5垂直数据测量 32
5.5 本章小结 32
6 总 结 33
6.1 回顾 33
6.2 展望 33
参考文献 34
致 谢 35
PM2.5垂直监测四轴飞行器设计
袁振国
,China
Abstract:To solve the problem of detecting the vertical distribution of PM2.5,we designed a PM2.5 vertical monitoring system based on the quadrotor. The system mainly includes a quadrotor and a PM2.5 detector. The quadrotor is based on STM32. a gyroscope,an accelerometer and an electronic compass are the composition of the aircraft attitude information monitoring and adjustment module.The aircraft power module includes ESC and brushless DC motor.We use dual-loop PID algorithm on aircraft flight Control. PM2.5 detector Shared quadrocopter master controller STM32 as data reception and processing,which saving the cost and improving the system integration .The data of PM2.5 collected by the Bletooth is transmitted to the ground data collection terminal.
Key Words:PM2.5; vertical sounding; quadrocopter; STM32
1 绪 论
1.1 引言
PM2.5也称细颗粒物,较小的空气动力学当量使得其能够悬浮在空气中较长时间,传输距离也较远。拥有粒径小、活性强、面积大等特性使得PM2.5更容易携带有毒、有害物质,对人体健康,能见度和空气质量都产生了重要影响。因此PM2.5的监测成为空气质量监测的一个重要指标,小范围PM2.5的灵活监测也显得尤为重要。
四轴飞行器具有结构简单、垂直起降、机动灵活、操作方便和制造成本低等特点,被广泛应用于航拍、测绘和地质勘探等领域。四轴飞行器的这些特点完全满足作为PM2.5灵活探测的载体,将四轴飞行器和PM2.5探测器结合,共用四轴飞行器的主控芯片作为PM2.5数据接受处理端,既可以实现高机动性、高灵活性的PM2.5探测,又可以节约成本。本文将ST公司的STM32作为四轴飞行器控制芯片,采用陀螺仪、加速度计及磁力计等传感器作为飞行姿态信息监测控制模块,搭载PM2.5粉尘传感器及NRF24L01无线数传模块,设计了一种具有PM2.5垂直探测功能的四轴飞行器。
1.2 设计的国内外研究现况
目前,四轴飞行器的研究获得了许多成果,也吸引了许多著名大学研究人员和爱好者的注意,其中相对知名的四轴飞行器如下。
1.2.1 Draganflyer
RC公司的研发产品Draganflyer如图1-1,支架使用碳纤维和高密尼龙材料,重0.48千克,长9.1米,负重可达0.11千克。R/C信号发射设备和板载主控芯片共同组成控制系统。在新版的飞行器中还增加四个红外热传感器用以提高户外飞行平稳性。

图1-1 Draganflyer
1.2.2 美国康奈尔大学
美国康奈尔大学研制的四轴飞行器见图1-2。三个摄像机地面上组成了视频系统,此系统可以通过捕获在四轴飞行器型支架四端放置的四个灯这来定位飞行器。板载主控将传感器数据发送给地面处理系统,地面处理系统通过融合传感数据和采集到的视频信号计算出四个电机的理论转速,并将其发送至板载主控,主控接收指令并调整其转速,达到飞行器平稳飞行的目的。
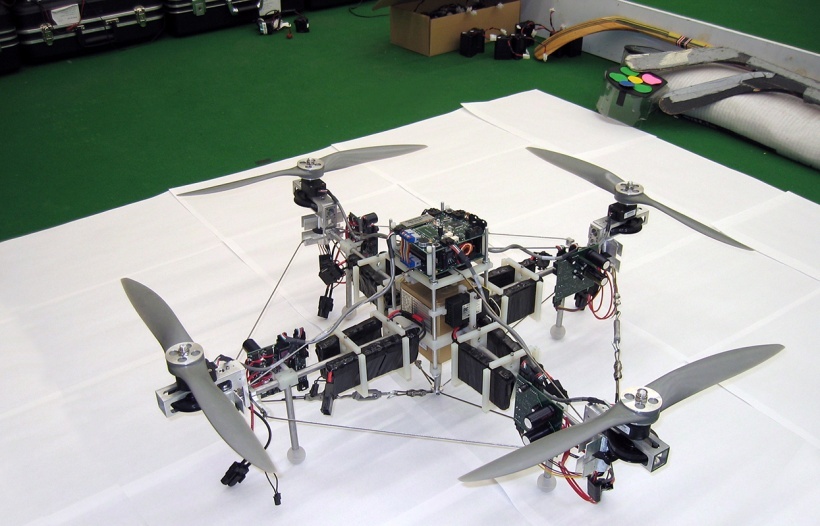
图1-2 Cornell四轴飞行器项目
1.2.3 Quattrocopter
Quattrocopter飞行器如图1-3,飞控系统搭载了多个姿态检测传感器、R/C信号接收器以及驱动电机的功率放大器和16位模数转换器。搭载的锂电池在满电的情况下能够维持20分钟的飞行。

图1-3 Quattrocopter飞行器
1.2.4 X-4 Flyers飞行器
由于EIMU的IMU质量轻,制作的四轴能够表现出较高的性能。研发人员最终决定使用此款IMU。如图1-4,项目组使用动力学波动慢的反向螺旋桨来提高四轴飞行器操控性。
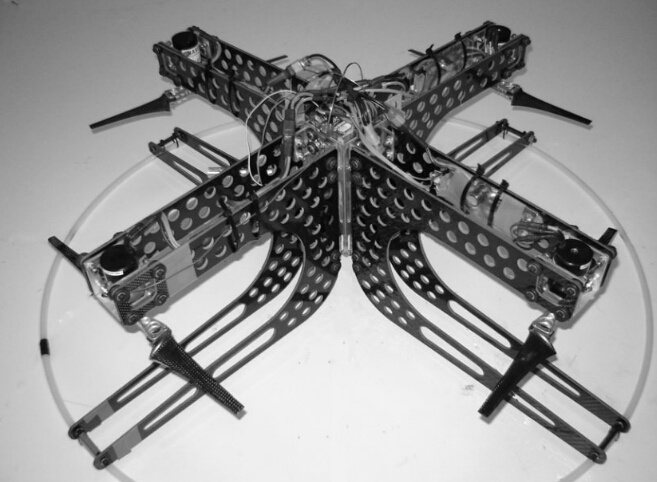
图1-4 ETH四轴控制方法测试
1.2.5 互联网上的四轴产品
当下互联网上也涌现出很多高性能四轴飞行器作品,爱好者从硬件制作及滤波控制算法改进上不断优化升级四轴飞行器,并在网上开源代码,推动了四轴飞行器快速走向成熟,具体开源项目如下:
(1)KK四轴
KK四轴飞行器使用8位芯片作为主控,结构简单,姿态测量只采用了三轴陀螺仪传感器。由于陀螺仪短时间的高可信度,飞行器能够在较短时间内获得不错飞行效果。但随着时间的增加,在飞行时需要人为操作调整,带来了较大的操作难度。
KK四轴的模型如图1-5所示:
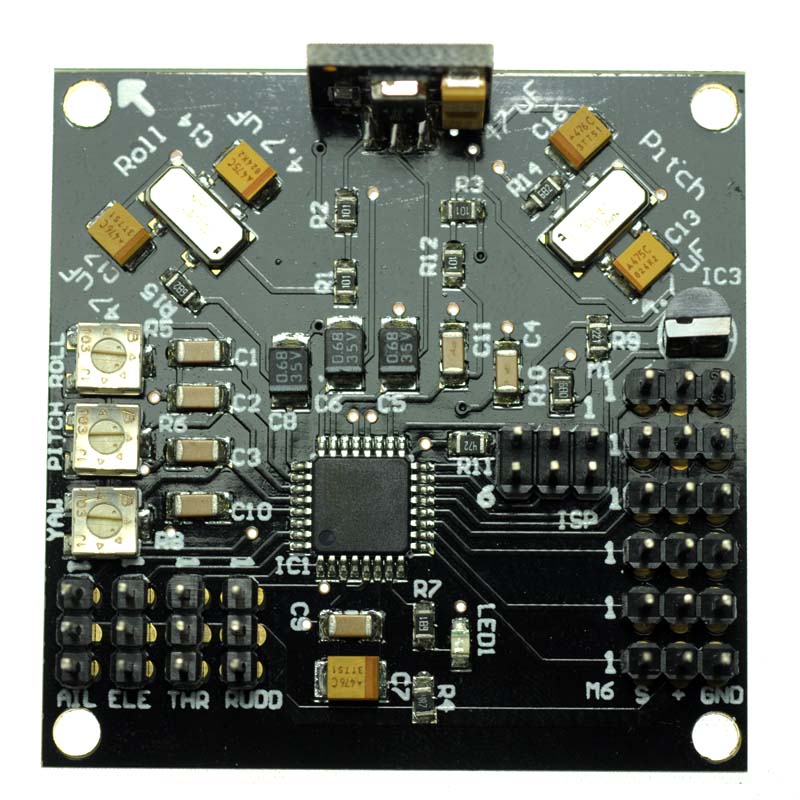
图1-5 KK四轴模型
(2)圆点四轴
圆点四轴是电子爱好者制作的基于ST公司32位处理器的四轴飞行器,它的架构相对KK四轴复杂,引入了加速度传感器、角速度传感器及磁力传感器等来实现姿态解算和导航,而且提供了丰富的接口,可以通过叠加扩展板来拓展功能。
此外,圆点四轴飞行平稳,能够使用安卓APP控制;其丰富的功能代码,模块化设计具有很高的学习和借鉴意义。
如图1-6所示为圆点四轴模型:
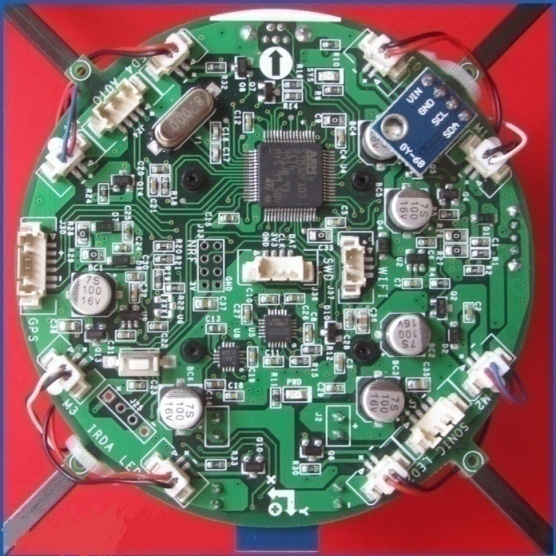
图1-6 圆点四轴模型
圆点四轴飞行器姿态检测部分借鉴了MK四轴算法,使用Mahony滤波算法代替传统的卡尔曼滤波,节省了大量计算。
1.3 设计的主要背景和意义
四轴飞行器在无人机的发展中最为突出。成本低、稳定性强,效益高使得其频繁出现在战争中。几次局部战争的爆发,推动了四轴飞行器在无人侦察,干扰微高空电子,以及照相侦查任务中的发展。即便如此,这几种应用也只实现了一小部分,因此,世界各国对军事无人机技术的研究和开发都在迅猛地发展着。
智能化的普及和四轴飞行器低成本的特点吸引了消费者的青睐。除了最基本的学习娱乐的功能外,在拓展外部设备以及加入控制算法后,四旋翼飞行器的优势则更加明显了。四旋翼飞行器已经在各个方面得到很大的应用,如在应急救灾领域,自主巡航的四轴飞行器可执行复杂地质条件的灾情调查和救援任务,如水灾、火灾、地震现场的情况勘察,物资运送,情报侦查等;在农业上还可以应用于小面积农田或林区的农药喷洒,害虫防治等任务。在气象环保领域,结合先进的气象及环保传感器,可以利用四轴飞行器对于地面一定垂直高度空间内的气象信息和环境监测数据进行实施测量,传输和处理。它还可以用于监测化工企业,石油勘探冶炼企业等危险场所的危险气体的浓度,巡查输油管线、输电线路;连续监控重要的设施等。搭载有小型无线通信设备的四轴飞行器,还可以用于大型活动现场的临时性移动通信基站,形成区域性空-地、空-海通讯中继。对于特定地区进行日常环境监测巡视的时候,采用四轴飞行器执行相关的任务将更加方便和高效。当自主巡查完后,飞行器可以自动返回目的地并将自动记录下的数据通过无线或有线的手段传输出来,大大减少了人力成本。
而本设计所提出的飞行器,结合了轻便的粉尘颗粒传感器,可以实现空气中PM2.5垂直分布的测量及数据采集,并对PM2.5的测量结果及浓度分布等特点进行分析。
1.4 本文内容及结构
第一章:简单介绍PM2.5的现状以及四轴飞行器的原理,解析国内外研究状况和设计的研究背景及意义,最后提出本文论述内容和布局结构。
第二章:分析四轴飞行器的结构框架并简要介绍各个模块,详细说明其飞行原理。
第三章:给出本设计硬件的整体结构,并说明各个模块的硬件原理与设计。
剩余内容已隐藏,请支付后下载全文,论文总字数:18062字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

