论文总字数:19365字
摘 要
倒立摆系统作为一种典型的非线性、自然不稳定、强耦合性的系统,从上个世纪六十年代开始便逐渐引起了世界各地学者的广泛研究。随着计算机技术的发展以及研究的不断深入,越来越多的新的算法被发掘。倒立摆的种类按照摆杆的级数区分大致可以分为一级、二级、三级、四级这四类。
倒立摆系统之所以被如此广泛而深入的研究,与其重要的工程意义密不可分。例如人造卫星太阳能电池板姿态的控制,机器人行走姿态的控制等等都可以借助对倒立摆系统的研究所得到的先进的控制理论。当一种先进的控制理论出现,将其用于倒立摆这种非线性的高阶的不稳定系统的控制之中无疑是检验其实用性的一种有效的方式。
本课题主要目的是设计一种基于步进电机的一级旋转倒立摆的PI控制器。其机械部分包括57步进电机、旋臂、摆杆、WDD-35精密电位器等等,整个控制系统主要由由MSP430单片机、开关电源模块、角度检测模块、角度显示模块、电机驱动模块以及写入单片机中的PI控制算法组成。第一章主要介绍倒立摆控制系统研究的历史与现状,本课题的设计要求。第二章论证了本课题的设计方案,并作出总体设计。第三章介绍了倒立摆控制系统常用的一些控制算法,并详细介绍了本次设计所使用的PID算法。第四章主要介绍了本次设计的硬件电路。第五章介绍了程序的编写思路以及调试过程及结果。最后对本次设计进行了总结和展望。
关键词:一级旋转倒立摆 PID算法 步进电机 MSP430单片机
A rOTARY INVERTED PENDULUM CONTROLLER design based on stepper motor
Abstract
. Inverted pendulum system is a kind of typical nonlinear, not stable, strong coupling system. It has caused the extensive research of scholars around the world since last century 60 s. With the development of computer technology and the deepening of the research, more and more new control algorithms was uncovered. Inverted pendulum type can be roughly divided into primary, secondary, tertiary, quaternary these four classes according to the series of swinging rod.
The extensive and indepth research of inverted pendulum is inseparable of its important engineering significance. Such as the attitude of the satellite solar panel control, robot posture control can all use the advanced control theory of the inverted pendulum system research. As a kind of nonlinear high order unstable syetem, inverted pendulum is an appropriate object to check the practicality of new control theory.
The main goal of this project is to design a PI rotary inverted pendulum controller based on stepper motor. The mechanical part includes 57 stepper motor, rotary arm, swinging rod, WDD - 35 precision potentiometer, etc. The whole control system is mainly composed by MSP430 single chip microcomputer, switching power supply module, angle test module, angle display module, motor driver module and the PI control algorithm. The first chapter mainly introduces the research history and present situation of the inverted pendulum control system, and the design requirements. The second chapter in the argument of this control system, and make the overall design. The third chapter introduces some commonly control algorithms of the inverted pendulum. The fourth chapter mainly introduces the design of hardware circuit. The fifth chapter is the thinking of program writing, debugging process and results. The last part is conclusion and expectation.
KEYWORDS: Simple rotational inverted pendulum PID . Stepper motor MSP430
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 项目背景及意义 1
1.1.1 工程背景 1
1.1.2 选题意义 1
1.2 倒立摆的种类及特性 1
1.2.1 倒立摆系统分类 1
1.2.2 倒立摆系统特性 2
1.3 国内外对于倒立摆控制的研究历史及现状 2
1.3.1 国外对于倒立摆控制的研究历史及现状 2
1.3.2 国内对于倒立摆控制的研究历史及现状 3
1.4 本文设计任务内容及总体设计 3
1.4.1 任务要求 3
1.4.2 基本要求及扩展任务 3
第2章 总体设计与论证 5
2.1 主控芯片的论证与选择 5
2.2 角度检测模块的论证与选择 5
2.3 电机驱动模块的论证与选择 5
2.4 显示模块的论证与选择 6
2.5 电源模块 6
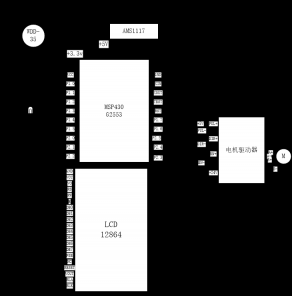
2.6 系统总体设计框图 6
图中各个模块的功能分别为: 7
第3章 算法介绍与理论分析 8
3.1 倒立摆平衡控制算法概述 8
3.1.1 部分状态反馈控制 8
3.1.2 线性二次型(LQR)控制与最优控制 8
3.1.3 模糊控制 8
3.1.4 PID控制 8
3.2 PID控制算法 9
3.2.1 PID控制器三个部分各自特点及作用 9
3.2.2 PID控制器参数整定 9
3.2.3 位置式和增量式PID算法的选择 10
3.3 起摆部分介绍 11
3.3.1 常用起摆算法简介 11
3.3.2 本文设计系统起摆介绍 12
第4章 硬件电路设计及介绍 13
4.1 主控芯片模块 13
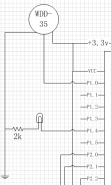
4.2 角度检测模块 14
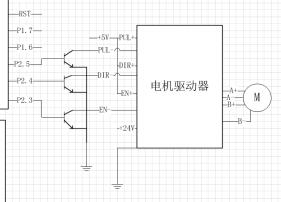
4.3 电机驱动模块 15
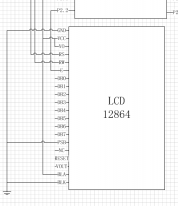
4.4 显示模块 16
4.5 AMS1117模块 17
4.6 控制系统整体电路设计图 18
4.7 控制系统整体实物图 19
第5章 软件设计及调试 20
5.1 软件简介 20
5.2 程序描述 20
5.2.1 起摆部分。 20
5.2.2 角度检测部分。 21
5.2.3 角度显示部分。 23
5.2.4 控制量运算部分 24
5.2.5 电机驱动部分 26
5.3 调试过程及结果 27
5.3.1 起摆调试 27
5.3.2 平衡控制调试 27
第6章 总结与展望 29
参考文献 30
致谢 31
绪论
项目背景及意义
工程背景
倒立摆作为一个支点在下、重心在上的严重非线性的系统,对其进行研究具有非常重要的工程意义。例如火箭发射过程的姿态控制、海上钻井平台的稳定控制、飞机安全着陆控制等等都和倒立摆的控制有很大的相似。对倒立摆进行深入研究所得到的理论,很有可能可以运用到这些实际工程的控制之中。此外,一种控制算法要运用到实际工程之中,必须要对其进行试验。倒立摆就是这样一种能对新的控制算法进行试验,从而检验其有效性、实用性的不稳定系统。也正是因为倒立摆这种重要的理论和实践意义,从上世纪五六十年代以来,对倒立摆进行控制的研究一直是一个热门,从中发掘出的控制理论与方法也在机器人、航空航天等领域得到了广泛的应用。
选题意义
倒立摆系统是一个在有关控制系统的教材或者研究文献中非常常见的例子。它之所以这么受欢迎在一定程度上是因为它是一个自然不稳定的系统。所谓自然不稳定就是说如果不加以控制,倒立摆不能在倒立状态保持平衡。在控制过程中的非线性问题、鲁棒性问题、随动问题都可以通过倒立摆的摆杆角度、稳定时间等控制效果显著而且直观的反应出来。倒立摆还可以用来验证新的控制理论的正确与否以及其可行性。
本文研究的是简易旋转倒立摆的控制,目的就是通过一种有效的控制方法来设计一个控制器,使得自然不稳定的倒立摆趋于稳定。对于倒立摆的控制研究由来已久,控制算法也多种多样,包括模糊控制、PID控制、自适应控制等等。本课题中我选用了在工程实际中,应用最为广泛的PID控制。
倒立摆的种类及特性
倒立摆系统分类
(1)小车倒立摆系统
小车倒立摆系统也可以称作直线倒立摆系统,根据摆杆级数有一到四级之分。控制难度随摆杆级数增加而增加。主要控制目标是使摆杆在竖直方向上平衡,同时小车也在某一位置稳定。
(2)平面倒立摆系统
平面倒立摆系统就是支点可以在二维平面内自由移动的倒立摆系统。这也是它与其它倒立摆系统的主要区别。直线倒立摆系统的支点只能沿着一条直线方向运动,而旋转倒立摆系统的支点则是在一个水平圆周内运动。
(3)旋转倒立摆系统
旋转倒立摆也被称作环形倒立摆,根据不同的摆杆级数和连接方式,旋转倒立摆也有很多种类。与直线倒立摆系统不同的是,旋转倒立摆的摆杆连接在与电机相连的水平旋臂的一端。电机转动控制水平旋臂在水平面内转动,从而带动摆杆在竖直方向旋转。这种结构增加了系统的非线性程度和复杂程度,使得平衡控制更加困难。
此外,在直线倒立摆的驱动部分增加弹簧部件,可以组成直线柔性倒立摆系统。柔性弹簧的引入使得控制过程非线性增加,振荡更容易发生,柔性倒立摆系统的控制也相对而言更为复杂、困难。
倒立摆系统特性
虽然倒立摆系统可以分为很多不同的种类,但是不管是哪一类的倒立摆都有如下这些特性:
(1)非线性
倒立摆作为一种典型非线性系统,对其进行控制既可以使用非线性控制方法也可以使用线性控制理论。使用线性控制理论对倒立摆进行控制一般是将其在平衡位置附近做线性化处理,这种方式在一级、二级摆控制中效果较好,而对于三级、四级摆则显得乏力。
(2)强耦合性
倒立摆系统的各部分机械结构之间存在较强的耦合性,比如本课题中的旋臂与摆杆之间。为了解决这个问题,一般的处理是对其在平衡位置附近进行解耦。
(3)绝对不稳定性
倒立摆的平衡状态有两个,其中一个是稳定的平衡状态,也就是摆杆不受控制时的自然下垂状态。另一种就是我们要通过控制器来进行控制的不平衡状态,也就是倒立状态。
(4)不确定性
所谓不确定性主要是指实际模型与理想模型之间存在差异。例如实际模型存在各种阻力、机械间隙等等不确定因素。一般通过改进机械结构来减小不确定性对控制系统的稳定性造成的影响。
国内外对于倒立摆控制的研究历史及现状
国外对于倒立摆控制的研究历史及现状
从上个世纪五六十年代开始,国外便开始了对于倒立摆控制的研究。从Schaefer和Cannon应用bang-bang控制理论在1966年首次实现了对单级倒立摆的稳定控制以后,由于倒立摆系统的不稳定、非线性和快速性,对它的控制引起了世界各国科学家的广泛关注。1976年,Morietc首先使用将倒立摆系统[1]在平衡点附近线性化的方法设计出一种比例微分控制器,实现了一级倒立摆的稳定控制。1978年,Furuta等人基于线性化方法实现[2]了对二级倒立摆的稳定控制,1984年,他们首次实现三级倒立摆的稳定控制。到了80年代后期,越来越多的人开始关注非线性分析的控制方法。包括Furuta等人1992年[3]提出的变结构控制,Fradkov等人1995年提出的基于无源性的控制等等。
近年来,遗传算法、神经网络、仿人智能、模糊控制等等越来越多的算法被运用到倒立摆控制上。
国内对于倒立摆控制的研究历史及现状
国内从上世纪八十年代年代开始进行对倒立摆控制系统的研究,然而国内的学者们刻苦钻研,发掘出大量卓有成效的理论成果。1995年,任章等人[4]提出在倒立摆支撑点的垂直方向上加入一个零均值的高频信号,改善倒立摆系统自身的稳定性。1996年,张乃尧等采用模糊双死循[5]环控制成功稳定一级倒立摆。1998年,蒋国飞通过[6]基于Q学习算法和BP神经网络进行倒立摆控制,将神经网络运用于倒立摆控制。2002年,由大连理工大学李洪兴教授领导的“模糊系统与模糊信息研究中心”采用变论域自适[7]应模糊控制成实现了四级倒立摆实物控制,世界上第一个成功实现四级倒立摆实物控制。
本文设计任务内容及总体设计
任务要求
要求设计制作一个步进电机驱动的简易旋转倒立摆,并设计开发其控制系统。旋转倒立摆由步进电机、旋转臂、摆杆以及固定或连接机构组成,旋转臂固定在电机轴上,旋转臂末端由一可转动机构连接摆杆。步进电机驱动旋转臂在水平面上旋转,从而带动摆杆在柱形的竖直面上摆动并呈倒立状态。控制系统能够控制步进电机转动,并通过检测倒立摆的竖直角度实现反馈控制,使倒立摆完成由悬垂静止状态起摆至倒立状态,并维持倒立状态。
旋转倒立摆控制系统以 MCU为核心(如增强型 51、AVR 或 ARM、DSP) ,并配以电机控制电路、角度检测电路、电源等。目标是完成简易旋转倒立摆及其控制系统的设计、制作与调试,实现旋转倒立摆的控制。
基本要求及扩展任务
1.学习和研究倒立摆的结构及原理,学习和掌握倒立摆的控制方法;
剩余内容已隐藏,请支付后下载全文,论文总字数:19365字
相关图片展示:

该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

