论文总字数:31857字
目 录
目 录 2
第一章 绪论 3
1.1 交通灯控制系统的发展 3
1.2 课题研究的背景 3
1.3 课题研究的主要内容 3
1.4 课题研究方案 4
1.5 课题研究的意义 5
第二章 硬件设计 6
2.1 单片机系统设计 6
2.2其他模块电路 7
2.3 系统整体设计 10
2.4蓝牙模块设计 11
第三章 程序设计 12
3.1 系统软件总设计 12
3.2系统初始化 12
3.3数码管显示程序 12
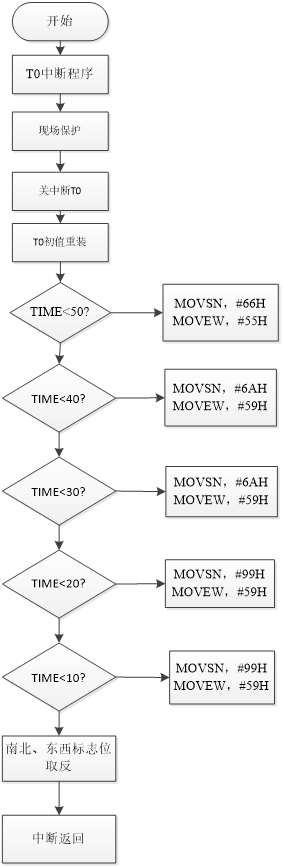
3.4定时中断程序 14
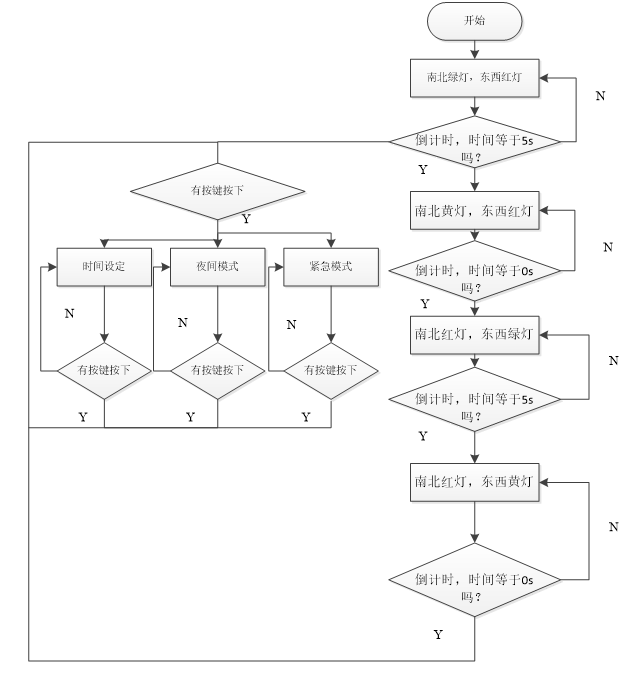
3.5通行规则切换程序 15
3.6夜间模式设置子程序 17
3.7特殊情况设定子程序 17
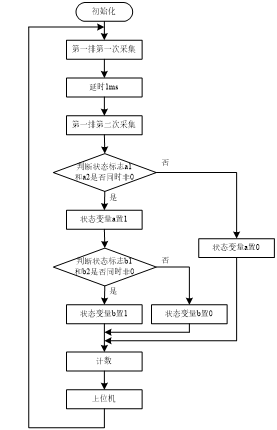
3.8车流量检查程序 18
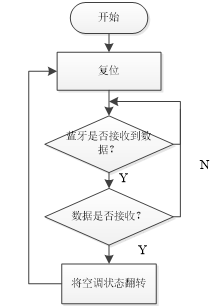
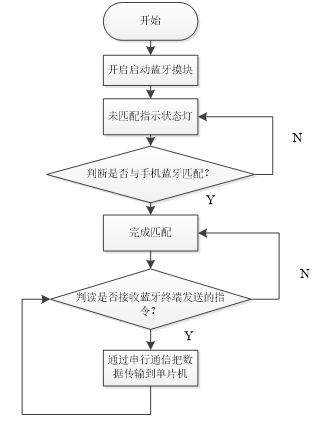
3.9蓝牙模块程序设计 20
第四章 系统仿真与调试 21
4.1 系统仿真 21
4.2 系统调试 25
第五章 总结与展望 27
参考文献 28
致谢 29
附录 30
第一章 绪论
1.1 交通灯控制系统的发展
交通灯始于1858在英国伦敦街头安装的红蓝两色机械扳手式信号灯,其主要的用途是指挥马车通行。我们所认识的煤气红绿灯始于1859年,它被安装在伦敦广场上,改红绿灯通过红绿转换来提醒行人通过或者停止。60年之后,红绿灯开始靠电气启动,并且黄色灯开始被使用在红绿灯上,这些灯在纽约开始被广泛使用,而绿灯的含义被改为同行[1]。1918年,红绿灯开始能人为控制。红绿信号灯使得交通系统在功能性上得到了突破性的完善和进步,这些进步体现在对环岛系统依赖性的拜托和车流量控制上。1968年联合国发布了《道路交通和道路标志信号协定》,这个协议的出现使得交通灯系统迈入了新的纪元。在这个协定中,交通灯每个信号都被赋予意义,并设置了相关的条款。绿灯和红灯分别赋予了同行和停止信号,而黄灯也开始普遍使用,其含义是提醒,减速。
1.2 课题研究的背景
随着经济发展,我国拥有车辆的人口不断增加,车流量也因此飞速增加。经济富有化使得每户家庭都有条件购买轿车。然而由于我国人口众多,国土资源有限,给交通运输带来很大的压力,造成了交通拥堵、交通事故和环境污染等问题。解决这些问题常用的方法有两种:第1种解决方法是限制道路车辆的增加;第2种解决方法是就是不断修路,但是这两个解决方案都有其局限性。限制道路上的车辆将会对人们的出行带来很麻烦,因此限制道路上车辆的数量是不可行的。大量修建道路需要花费时间和财力物力,可行性不是特别高。因此,只能依靠其他的方法来解决交通阻塞等问题。然而随着交通系统向智能化发展,对城市交通流进行智能控制,能够使道路交通畅通,提高人们出行的效率。智能交通控制系统能够让交通保持在一个畅通的运行状态,从而减缓当前交通拥挤状态,将大大减小交通运输的所需时间和减少交通事故发生的频率,提高道路交通安全,达到节能减排作用。
半智能的交通灯虽然在设计上有巨大的缺陷,但是仍然被频繁使用在一些中小型城市。但随着城市化进程的不断发展,一些先进的智能交通灯系统虽然价格高,但是其解决车辆拥堵的能力和传输控制系统,必然会在中大型城市更加频繁的使用。以往交通灯的固定时间模式,在闹市区的缺点越来越明显。为了解决上面讲的问题,本系统利用红外传感器检测车流量状态,用C51单片机对路口车流量数据进行处理来实现智能交通灯控制系统的整个功能,最终实现以道路口的车流量大小来实时控制路口的通行。本文设计的交通系统结构简单、可靠性高、成本低、实时性好,在应用方面具有广泛的前景。
1.3 课题研究的主要内容
本课题主要从硬件和软件设计两个方面进行设计,硬件设计主要包括单片机最小系统的原理图设计和电源的原理图进行设计以及各模块的电路图进行设计。软件设计主要根据智能交通控制系统的功能分模块进行设计,主要有夜间模式、紧急模式、数码管显示等部分的软件设计。最后本课题完成了系统整体测试[2,3]。
1.4 课题研究方案
1.4.1 系统总体方案
我们对系统课题研究有了充分的理解,另外,系统性价比也是系统总体中的关键性因素。如图1.1所示,红外传感器模块、蓝牙模块、数码管显示模块、红绿灯以及电源模块和显示模块、紧急控制模块共同构成了系统的整体,使之能够合理的形成系统[4]。
图1.1系统方框图
1.4.2 车流量检测方案
车流量检测方案在整个智能交通灯系统中占有非常大的比重,整个方案具有单一性和多样性,比如有磁感应车辆检测、磁感应车辆检测,无线车辆检测和红外线车辆检测等方法。虽然磁感应车辆检测方法性能稳定、技术成熟而且精度也很好,但是线圈的安装和维护会对车辆通行造成麻烦,感应线圈自身的检测原理也会受限制。当车辆阻塞和每辆车的车间距小于3米时,测量得不到保障。同时,对于一个本科生买一个磁感应装置去完成毕业设计,有点不现实[5]。因此,我们使用红外传感器这种兼具性价比和功能性的检测手段来完成车流量的检测。虽然红外传感器只能完成单车道车辆的检测,但是适合本次毕业设计的车流量检测功能实现,而且传感器的价格比较低廉,安装调试也比较方便。其工作示意图如图1.2所示。
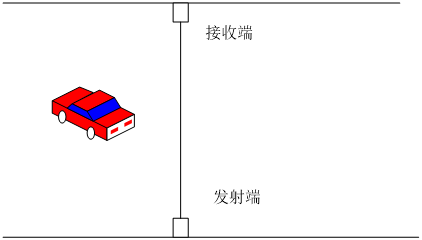
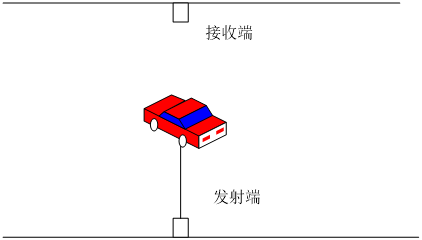
图1.2 红外线模块示意图
1.5 课题研究的意义
本文设计的基于单片机的智能交通控制系统不仅可以实现多个路口的交通协调。其可应用在城市的十字路口,对城市交通进行自动控制和紧急情况下以及夜间情况下可以进行手动切换红绿信号灯,让有特殊情况的车辆优先通行。由于传统的交通灯控制系统设计非常死板,其红绿灯的交替时间过于程式化,无法解决交通拥挤等问题。因此,智能交通灯控制系统设计具有更好现实意义和研究意义,它可以依据道路交通拥堵情况调控红绿灯显示的时间,可以很好的解决城市道路交叉路口经常出现的车辆拥堵情况[6,7]。同时,以单片机、红外传感器和蓝牙模块为核心的智能交通控制系统,经济实惠,实现简单,可操作性强,拥有广泛的应用前景[8-10]。
第二章 硬件设计
2.1 单片机系统设计
2.1.1 单片机介绍
本文选用的微控制器是AT89C51,其高性能可以通过低压带4K字节FPEROM来表现。其FPEROM拥有很长的寿命,可以频繁的擦除足够的次数。因此ATMEL的AT89C51是一种高效微控制器。其采用双列直插式(DIP)式的40引脚,内部由CPU、ROM、RAM、定时/计数器T0与T1和 I/O端组成,其中P0、P1、P2、P3为双全功能的通信口。另外,因为AT89C51单片机内拥有可编程的Flash和可擦除只读存储器(EPROM),使其在实际应用中有着十分广泛的用途,而且它有方便携带、省电、灌电流小等特点,所以本次毕业设计选用单片机AT89C51[11]。
2.1.2 单片机最小系统
本文选用的微处理器是由电源、复位、振荡电路以及扩展部分等部分组成,这些部分构成了单片机的最小系统,其原理图如图2.1所示。

图2.1 单片机最小系统
复位电路:C51单片机最小系统的复位电路的电路图如图2-2所示,复位电路与C51单片机的RST引脚相连。根据数据手册上标注,只要该引脚接收到一个高电平信号并且持续2us以上的信号。所以为了保证这个时间大于2us,对这个电容还有有比较大的要求,至少保证这个复位电容的充放电时间必须大于2us,即可实现复位[12]。

图2.2 复位电路图
振荡电路:构成C51单片机最小系统的振荡电路的电路图如下图2.3所示,振荡电路与C51微控制器的XTAL1和XTAL2的两个引脚相连。晶振用来产生单片机所需的时钟频率,通过结合结合内部的震荡频率。因此晶振在整个系统中是不可或缺的。为了想让这个运行速度变快,就需要单片机晶振提供高一点的时钟晶振,这样单片机运行一个程序所需要的时间就越短。当然这个也受到了内部电路的限制,晶振有一个范围的值。

图2.3 晶振振荡电路图
2.2其他模块电路
2.2.1 按键手动设置电路
该电路是整个系统的重要组成部分,该部分主要完成夜间模式设置、紧急模式设置和交通灯倒计时设置功能。该电路主要由6个按键组成。由于独立式按键电路不仅拥有灵活的配置,可以对其进行更多自由的设计,而且软件结构简单,方便易懂。所以这种方式更加适合本文的设计,其原理图如下图所示。

图2.4 按键输入电路
K1按键是复位键,K2按键是夜间模式转换按钮,通过该按键完成夜间模式的切换,当该按键被按下后,十字路口四个方向红灯长亮,再次按下按键后,夜间模式将会退出。K3是紧急转换按钮,当有消防车或者救护车等紧急车通过时,通过该按键完成紧急模式切换;K4是时间设定按键,按下该按键后就可以进行时间设定,然后通过K4和K5手动设置红绿灯倒计时的时间长度。根据红外传感器采集的东西与南北方向车流量数据判断哪一方向多车就调整该方向红绿灯倒计时时间。紧急车请求通过的信号以及延长相应绿灯时间的信号都可以通过蓝牙模块远程控制实现。6个按键分别于单片机的P2.0至P2.5链接,按键输入与否是根据I/O口的高低电平来判断的。I/O口保持高电平时候,表示正常状态,无紧急事件;相应I/O低电平时,即表示相应按键已经按下。
2.2.2 信号灯显示和时间显示电路
四组发光二极管组成了交通信号的显示电路,颜色由红绿黄三种颜色构成。微控制器I/O口的高低电平信号用来控制电路中发光二极管的显示。因此,我们在将发光二极管正极连接至电源时,需要在其中加入一个限流电阻。其信号灯显示电路如图2.5所示。在此电路原理图中,采用低电平有效方式控制发光二极管,如果在单片机中,输出的信号是低电平,那么信号灯就会变亮,所以开始时需要在程序中设置每个发光二极管所对应的口为高电平。

图2.5 信号灯显示电路
为了显示倒计时的时间,我们使用了2位7段共阳极数码管。如果用单片机直接驱动,假设限流电阻为330欧姆,则每段led的电流大约为10ma,如果此时led显示为‘8’,则数码管每个段都工作,此时电流为70ma,大大地超过了单片机端口的最大吸收电流,会对单片机造成不可挽回的破坏,是整个系统不能正常运行,造成人员伤亡和经济上的损失。所以本系统设计中采用中功率三极管,三极管的发射极接至高电平,基级接至单片机IO口控制,集电极接至数码管的位选端。为了控制数码管的亮灭,使用微控制器IO端口使三极管在截止区或饱和区工作。其电路图如下所示[13]。

图2.6 数码管显示电路
2.2.3电源供电电路
如图2.7所示。开关电源的输出电压是 15V的交流电,经过整流滤波后,再接到镍氢电池组的输入端进行充电,充电采用恒流方式。充满电的电池组经过7805芯片进行稳压,其电压提供给单片机系统供电。由于期间充电的电流可达400~500mA,且充电时间较长,所以三极管的功率就比较大,本设计选用功率高的C8050来满足要求。5KΩ的电位器可用于调节充电过程中的电流,避免电流过大导致烧坏元件或者电流过小,充电时间过长。当然,实验设计过程中为了简便,省钱。我们可以不用电机。直接用4个1.5V的电池组经过7805稳压后得到 5V电压或者通过5v适配器来给单片机系统供电,使他们能够正常工作。

图2.7 电源电路原理图
2.3 系统整体设计
根据智能交通控制系统功能设计要求,再结合各模块电路,得到所示的系统整体原理图。

图2.8 系统原理图
2.4蓝牙模块设计
本文选用的蓝牙模块是HC-05蓝牙模块,其是一款性能较好的蓝牙通信模块。由于该模块支持的波特率范围非常宽,其范围大概是4800-1382400,并且能够与多种单片机系统进行兼容匹配,连接方便且使用灵活,拥有比较高的性价比,因此通常将其作为工业级产品,其优点特点对于智能交通控制系统来说已经足够。HC-05通信模块电路图如图2.9所示[14]。

图2.9 HC-05通信模块电路图
在完成对蓝牙模块电路的设计和焊接工作后,首先要对蓝牙进行匹配测试,以保证蓝牙模块能够正常使用。对蓝牙模块收发功能进行测试是关键一个环节,其具体步骤如下:
剩余内容已隐藏,请支付后下载全文,论文总字数:31857字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

