论文总字数:29421字
目 录
摘要 1
Abstract 2
一、背景 4
(一)国内外研究现状......................................................4
1.国内................................................................4
2.国外................................................................4
二、混合高斯模型介绍..................................... 3
三、运动车辆检测技术概述 6
(一)常见运动车辆检测方法概述 7
1.帧间差分法 7
2.光流法 7
3.背景减除法 8
4.常用运动车辆检测方法的比较 9
(二)图像预处理 10
1.中值滤波去噪 10
2.图像灰度化 11
四、混合高斯模型的运动车辆检测研究 11
(一)混合高斯分布模型参数对检测结果的影响 11
1.高斯分布个数对检测结果的影响 11
2.阈值H对检测结果的影响 12
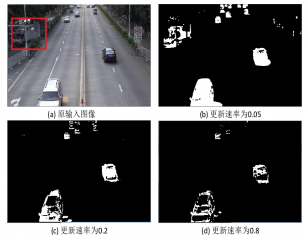
3.更新速率对检测结果的影响 14
(二)融合边缘信息的混合高斯模型 14
1.混合高斯模型存在的不足 14
2.Canny算子原理 15
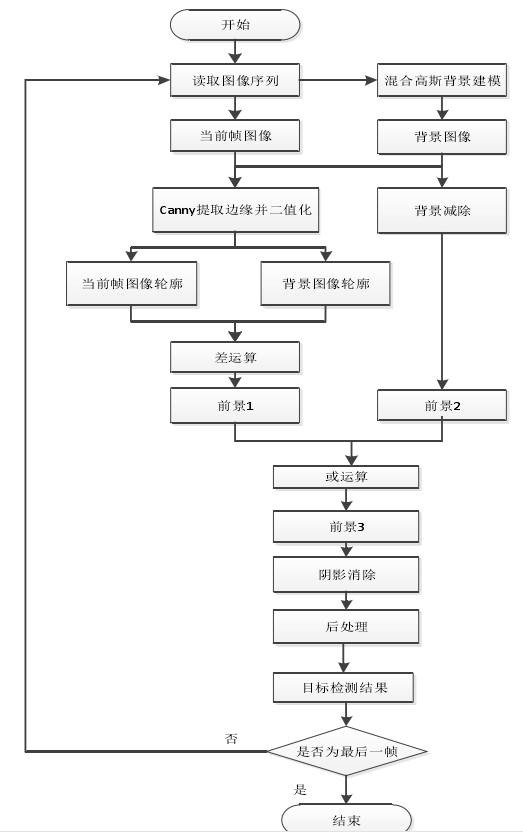
3.融合边缘信息的混合高斯模型实现 17
(三)实验结果与分析 21
1.准确率分析 21
2.处理速率分析 23
五、总结 24
参考文献 24
致谢 26
附录一..................................................27
附录二.................................................34
基于混合高斯模型的机动车检测
陆黎明
,China
Abstract:With the development of science and technology, people's living standards improve, car ownership also increased, which led to more and more frequent traffic problems, intelligent transportation system came into being. The vehicle detection technology is an important part of intelligent transportation. This paper focuses on the vehicle detection technology, compares the traditional vehicle detection methods, understands the advantages and disadvantages of each method and the application environment, and then uses the hybrid Gaussian model to carry out vehicle detection. Then through the experiment to understand the impact of the experimental results of several key parameters, and know how these parameters will be affected, so as to choose the best parameter values. Finally, we learned some improved methods of hybrid Gaussian models.
Key words: mixed Gaussian model; moving vehicle; detection
一、背景
近年来,随着科学技术持续高效的发展,人民生活水平显著提高,并且一大部分家庭都拥有私家车,使得我国车辆总数迅速上升,然而,土地资源是有限的,增加的车辆总数就使得交通环境变得十分恶劣,交通事故,交通拥堵,违法违章等情况频频出现,为了减少这些问题,智能交通系统及时的出现。智能交通系统通过对移动车辆的检测、对移动车辆的跟踪,比传统的交通系统更加的快速、准确、高效。同时,它还减少了对人力资源、环境、处理能力和系统监控范围的投资。由于智能交通系统的许多优点(高效、准确、节省资源等)传统的交通系统已经逐步被智能交通系统所替代,今后,智能交通系统将会进一步的发展。
智能交通系统的高效处理,不仅与信息社会的发展密切相关,而且还决定运输的研究课程,包含无限商机,相关学者在该领域的研究使得投资者和政府也对其抱有热烈的期望。因此,发展智能交通系统已经成为现在的一种新的方向,并且为计算机视觉技术提供了便利。
车辆检测技术作为智能交通技术的重要组成部分,各种学者早已对其进行深入的研究。但是,但是由于视频检测的不稳定性,光照的变化,背景的晃动等等一系列因素都会对移动车辆的检测带来不可预知的影响,是我们需要面临的巨大困难。但是这一研究方向前景广阔,相信不久的将来,运动车辆的检测技术将会运动到军事、航空等各方面领域。
(一)国内外发展现状
1.国外:
运动车辆的检测是智能交通系统的一种重要的组成部分,随着交通的发展,高速公路成为衡量一个现在化国家的重要部分。其中在国外,对于智能交通系统,有以下几个国家做的十分先进。其中澳大利亚拥有最优自动适应交通控制系统、远程信号控制系统和微机交通控制系统。而日本从1996年就制订了智能交通发展的计划,而2000年巡行公路系统已经进入了实用阶段。2003年日本装有导航的车辆已经达到了1200多万辆。并且日本的电子收费效率很高,排水路面效果也很好。新加坡的高速公路监控及诱导系统十分先进。
2.国内:
我国也从20世纪90年代开始就重视起了智能交通系统,科技部在1996年开始就进行了一系列交流研究。2001年成立了全国智能交通系统协调领导小组及办公室。许多大学,如东南大学,吉林大学等也纷纷投入到智能交通的建设中。2010年我国智能交通市场上的项目就达到六百多个,市场规模超过50亿。
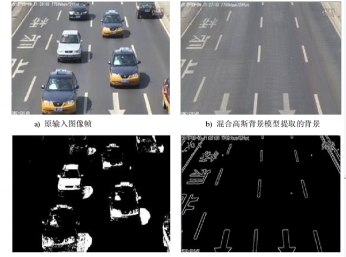
三、高斯背景建模介绍
在高斯背景建模中,每一个像素的值用K来表示,而K的值一般为2-5.所以表示像素 在时间
在时间 的时候表示的函数则为,的概率用函数表示为,中的
的时候表示的函数则为,的概率用函数表示为,中的 表示像素
表示像素 在模型中的位置,而这些数值满足的条件是.
在模型中的位置,而这些数值满足的条件是.
这里和分别表示第 个高斯成分的均值及协方差,
个高斯成分的均值及协方差, 表示高斯概率密度函数:
表示高斯概率密度函数:
其中 为的维数。对于
为的维数。对于 颜色空间而言,可视为相互独立,则协方差矩阵定义为,其中
颜色空间而言,可视为相互独立,则协方差矩阵定义为,其中 表示标准差,
表示标准差, 代表单位矩阵;
代表单位矩阵;
一般我们在开始阶段对像素点通道的取值范围为0到255,因为一开始对速度的要求并不高,我们可以对 个高斯分布直接初始化较大的,对每个高斯分布的权重取,对模型中的K值进行初始化,我们就需要用到第一帧图像中的每一个像素的值。
个高斯分布直接初始化较大的,对每个高斯分布的权重取,对模型中的K值进行初始化,我们就需要用到第一帧图像中的每一个像素的值。
每个像素的混合高斯模型都在不断的随着场景的变化而变化。将混合高斯模型中的每个高斯分布按照由大到小排序,检验新获取的图像帧的像素和混合高斯模型中的每个高斯分布按照由大到小排序,将这两种进行对比,看是否对应匹配,假如新获取的图像帧的像素与混合高斯分布的某个成分满足下式就认为该像素与高斯分布相匹配( 为匹配阈值)
为匹配阈值)
若与第 个高斯成分匹配,则高斯成分被更新,其余的高斯成分保持不变,更新方程如下所示:
个高斯成分匹配,则高斯成分被更新,其余的高斯成分保持不变,更新方程如下所示:
其中 是模型的学习率,
是模型的学习率, 为参数的学习率,反映的是高斯分布参数的收敛速度。若与像素的
为参数的学习率,反映的是高斯分布参数的收敛速度。若与像素的 个高斯分布都不匹配,那么混合高斯模型中排在最后面的那几个高斯分布将会被新的高斯成分所替代,新成分的均值为,标准差和权值被初始化为和。剩下的高斯分布保持相同的均值和方差,它们的权重按照下面的式子进行更新:在更新完成后,各高斯分布的权重需要被归一化。更新后,我们用下面的方式来判断模型中哪些高斯成分是由背景产生的,根据每个高斯分布按照由大到小排序后,取前个高斯成分作为背景的分布,可以采用下面的式子来确定:
个高斯分布都不匹配,那么混合高斯模型中排在最后面的那几个高斯分布将会被新的高斯成分所替代,新成分的均值为,标准差和权值被初始化为和。剩下的高斯分布保持相同的均值和方差,它们的权重按照下面的式子进行更新:在更新完成后,各高斯分布的权重需要被归一化。更新后,我们用下面的方式来判断模型中哪些高斯成分是由背景产生的,根据每个高斯分布按照由大到小排序后,取前个高斯成分作为背景的分布,可以采用下面的式子来确定:
, 为预定义的阈值,代表了背景高斯成分在像素的整个概率分布中所占的最小比例。取较大者表示像素值具有较大的方差和较高的出现概率,这正体现了场景背景像素值的特性。
为预定义的阈值,代表了背景高斯成分在像素的整个概率分布中所占的最小比例。取较大者表示像素值具有较大的方差和较高的出现概率,这正体现了场景背景像素值的特性。
在混合高斯模型中,高斯成分的个数为K,而前文说过,K的值一般取在2-5之前,因为如果K值取的太小,比如取1,那么混合高斯模型就变成了单高斯模型,就无法应对复杂多变的环境状态,相反地,如果K值取的越大,在一定的范围内,确实计算更加精确,能力更强,但是如果超过一定的数值,并不能增加多少性能,反而会加重计算量,得不偿失。所以K值一般适当的取在2-5之间。在实际的实验中,背景状态总是一直变换的,所以背景的状态个数肯定是不同的,即使同一区域在不同的时间肯定也会发生变化。所以我们必须根据实际的应用来实时的改变高斯分布的个数,从而适应更加多变的背景环境。
四、机动车探测技术概述
移动车辆检测,是指将车辆的运动图像序列分离,通过获取的运动车辆信息,再进行识别等等操作,由此可见运动车辆的检测这一步,是影响后续操作的最大的因素。也因此,运动车辆的检测成为了计算机视觉研究领域的焦点。本节将重点讨论常见的测试方法和图像预处理。
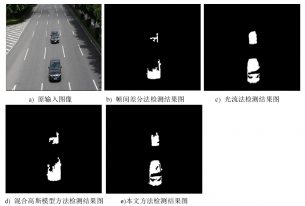
(一)通用汽车检测方法概述
目前,有许多类型的机动车检测技术可以分为三类,第一种,帧间差分法,这种方法简单,但是同样的错误率也非常之高;第二种,光流法,这种方法虽然可以应用于绝大部分环境,但是计算量非常高,第三种就是除开对外在影响感应特别敏锐的缺点外,能准确的检测出需要检测的车辆的背景减除法。
1.帧间差分法
剩余内容已隐藏,请支付后下载全文,论文总字数:29421字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

