论文总字数:18180字
目 录
1绪论 3
1.1 项目研究背景及意义 3
1.2国内外发展趋势和研究现状 5
1.3 论文研究的内容和结构框架 8
2 多旋翼无人机系统构成及飞行原理 9
2.1研究对象的硬件构成 9
2.2控制系统硬件架构 10
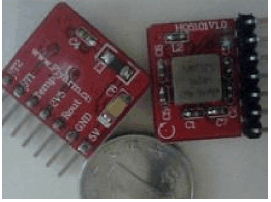
2.2.1 传感器模块 11
2.2.2 微处理器模块 12
2.3多旋翼无人机飞行原理 15
3 动力系统故障电路设计 17
3.1无人机故障的定义 17
3.2无人机故障的分类和故障检测的步骤 18
3.3基于模型的故障检测方法的优缺点 18
3.4无人机动力系统故障检测方法 19
4 电流--转速模型验证 23
5 归纳总结与展望 26
参考文献: 26
致谢 28
多旋翼无人机动力系统故障检测电路设计
王庆
,China
Abstract: with the wider use of multi-rotor unmanned aerial vehicles, more and more people are concerned about its safety. Sensor failure and power system failure can be identified as the highest probability of occurrence of multi-rotor unmanned aerial vehicle failure. This paper mainly studies the fault detection of power system of multi-rotor unmanned aerial vehicle (UAV), and designs a suitable power system fault detection circuit according to the characteristics of multi-rotor unmanned aerial vehicle. The fault detection method of current - speed model is designed by using the fault detection method of the same model. The feasibility of the method is verified by simulation.
Key words: multi-rotor unmanned aerial vehicle; power system; fault detection circuit design
1绪论
1.1 项目研究背景及意义
近年来多旋翼无人机的应用越来越广泛,已经由原来以微型轻型无人机发烧友和爱好者为主的娱乐功能向航拍、搜救、物流、监控、运输等领域发展,市场空间大大发展。多旋翼无人机从过去的依赖GPS自主飞行发展到如今的依靠视觉传感器实现自主飞行。多旋翼无人机的技术发展日新月异,无人机的应用与人类的日常生活的联系越来越紧密。但是这一轮热潮中多旋翼无人机的安全问题也越来越多。
1907年8月,法国C.Richet教授指导Breguet兄弟进行了他们的4旋翼飞机的飞行实验,这是世界上第一架多旋翼飞行器。20世纪90年代以后,微机电系统技术获得告诉发展,奠定了多旋翼无人机的实用发展的坚实基础。2005年,稳定可靠的多旋翼无人机自动控制器研制成功。2006,德国Microdrones GmbH公式正式推出mad4--200 四旋翼无人机系统,开创了电动多旋翼无人机在专业领域应用的先河,2010年是多旋翼无人机大发展的元年,世界许多国家研制了多种多旋翼无人机,其中中国大疆创新公司凭借其最大销量的四旋翼无人机,拥有了全球70%以上的市场[1]。
随着多旋翼无人机的生产和应用在国内外爆发式的发展,尤其是低空,慢速,微轻型多旋翼无人机的数量快速增加,以及各大公司生产的无人机的大量销售。目前中国的大疆、零度、以及美国的3DRobotics和法国的Parrot等已经成为市场上的龙头企业。
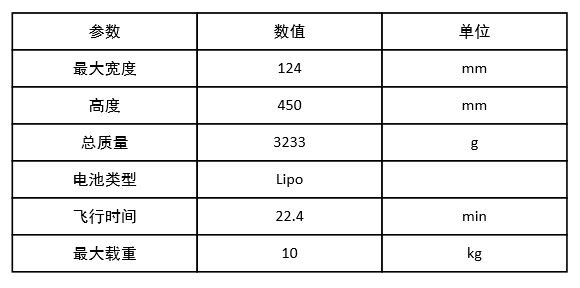
多旋翼无人机的设计各种各样,因此它的机械结构也是多变的。包括简单的四旋翼无人机(图1,.1),相对复杂的六旋翼无人机(图1.2),八旋翼(图1.3)、十二旋翼无人机都是很常见的机型。尽管目前多旋翼无人机的续航能力不足,承载重量能力有限制的问题还未得到妥善解决,但是多旋翼无人机的垂直起降能力,便携性,操作简单,起飞条件较低的优势还是在各个行业拥有不可取代的优势。然而因为单旋翼的无人机动力系统有限,如果单旋翼的无人机发生传感器故障或者桨叶损坏的情况,结果只能是坠毁。但是由于六旋翼无人机及以上的多旋翼无人机在设计时会有剩余的动力,使多旋翼无人机在发生单一系统传感器故障或者动力系统故障时回收无人机成为可能。也就是说多旋翼无人机的安全性比传统的单旋翼无人机的安全性要高,这也是本文研究多旋翼无人机动力系统故障安全而非单旋翼无人机动力系统故障安全的原因之一。

图1.1普通的四旋翼无人机

图1.2普通的六旋翼无人机

图1.3 普通的八旋翼无人机
现在国内外普遍将2010年作为多旋翼无人机大发展的元年,在此之后无人机经历了爆发式增长,市场应用越来越广泛,特别是现在广泛用于人口稠密的地区,已经有公司将无人机用于收发快递,国内外对于多旋翼无人机的故障造成的人员财产损害的报道屡见不鲜,在2015年就曾经发生多旋翼无人机意外撞伤模特事件。国内外对于无人机的航空管制的呼声越来越高,北京市率先对各式无人机进行了管制,任何无人机飞行需要得到航空管制部门的允许,因此设计制造安全性高的多旋翼无人机显得很有必要。如果无人机的安全性得不到保障,那么无人机的使用和发展前景也会随之不被看好,为了这个产业的健康发展,我们需要提高多旋翼无人机的安全性。随着时间的推移,多旋翼无人机的元器件老化,传感器故障等一系列难以预测的故障情况导致的人员财产损失已经成为无人机安全飞行的主要障碍。针对这些不可预测的故障场景,我们需要实时监控无人机的安全状况并设计一套高效便捷的无人机故障检测系统,以便我们在无人机发生故障时可以从容应对。
根据故障发生的场景分类,大致可分为软件故障和硬件故障。软件故障多表现为传感器数据检测出错,控制信号错误等。针对软件故障的情况,我们需要优化无人机的控制程序,并且提高无人机的检测能力。硬件故障多表现为传感器故障,单片机故障,桨叶损坏,电机驱动发生故障,电机转速出现故障,无人机动力系统供电故障等。
1.2国内外发展趋势和研究现状
20世纪50年代以后,世界各国的大学开始研究无人机,但是多旋翼无人机的研制遭遇了如下主要障碍:
- 惯性导航系统体积巨大,重量太大,基本不能应用于小型无人机上;
- 电子自动控制系统不成熟;
- 计算机体积太大,运算速度慢。
但是在20世纪90年代以后微机电系统的技术发展迅速,奠定了多旋翼无人机的实用化发展,它的尺寸小,重量轻,人们开始开发多旋翼无人机的自动控制器。2005年以后稳定性好,可靠性高的多旋翼无人机自动控制器如雨后春笋般被研制出来,多旋翼无人机的研究越来越受到大家的重视。多旋翼无人机的故障检测以及故障解决方法也在不停地发展。值得一提的是瑞士在多旋翼无人机故障检测以及容错控制方面一直处在世界前列。其中苏黎世联邦理工学院有一个多旋翼无人机研究小组[2],以德国某公司生产的蜂鸟四旋翼无人机(图1.4)为对象,设计了VICON动态捕捉系统(图1.4中白色物体)。刚开始,他们通过使用VICON系统测量一个电机停止工作后,偏航角(yaw)方向自转的角速度和角度。然后将机体坐标系和地面坐标系合二为一放在同一坐标系里,实现了俯仰角(pitch)和翻滚角(roll)的控制。
但是他们并不满足,经过不断研究,他们用IMU测量的数据代替了VICON系统测量的数据,通过计算得出无人机某一个电机停止工作后的自转角速度和角度,从而实现了对无人机另外两个方向的控制。但是他们也认识到一个问题,四旋翼无人机在设计时并没有考虑剩余动力的问题,这就导致四旋翼无人机在其中一个电机停止工作后,其他三个电机提供的推力不能使推力相对于机身是对称的,为了解决这个问题,他们通过VICON系统成功实现了关闭一个电机,使无人机在两个电机运行的情况下安全着陆。

图1.4 带VICON系统的四旋翼无人机
与此同时,苏黎世联邦理工学院的另一个研究团队[3]在六旋翼无人机的平台上进行研究,他们利用六旋翼无人机有剩余动力的特点,将六旋翼无人机原来对称式电机旋转方向改为非对称式电机旋转方向,非对称性式拥有更高的容错性能,同时提出了新的控制方式,实现了六桨,五桨和四桨的飞行。在此基础上,他们先测量电机的最大扬力,计算出翻滚角和俯仰角方向的最大正力矩以及偏航角方向最大的反力矩,凭借这些测量和计算结果,将控制器算出的输入参数控制在该范围内。同时,他们根据测量的参数计算电机的工作效率是否为0,如果电机工作效率为0,则判断该电机发生故障。但是当电机发生故障时(图1.6),各个电机的故障带来的扬力的变化,使各个自由度的力矩范围发生变化,显然各个力矩和反力矩的限制范围也在发生变化,因此,他们特意设计了每一种故障发生时的状况与控制器控制输入分配算法(图1.7)一一对应,这样,不管那种情况发生,无人机都能完成电机停止工作后的控制输入算法的切换。这种固定的控制算法,使得无人机有更高的安全性,特别针对现如今的多旋翼无人机,这种因占用处理器更小资源的做法,很大程度上保证了无人机的安全性,也更好的保证了无人机的稳定性。

图1.5 六旋翼无人机结果图
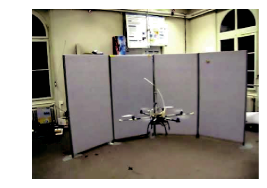
图1.6 无人机故障实验
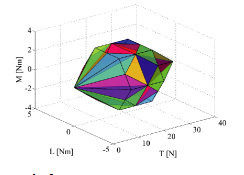

图1.7控制算法分配 图1.8 故障示意图
剩余内容已隐藏,请支付后下载全文,论文总字数:18180字
相关图片展示:



该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

