论文总字数:20291字
目 录
摘要 1
Abstract 2
1绪论 3
1.1研究背景及研究意义 3
1.1.1 无人机及其发展历程 3
1.1.2 无人机地面站 3
1.2国内外研究现状 4
1.2.1基于PC端的无人机地面站软件 4
1.2.2 基于智能终端的无人机上位机 6
1.3本文的主要工作与论文结构 7
2总体设计方案 8
2.1软件需求分析 8
2.2 软件设计目标 8
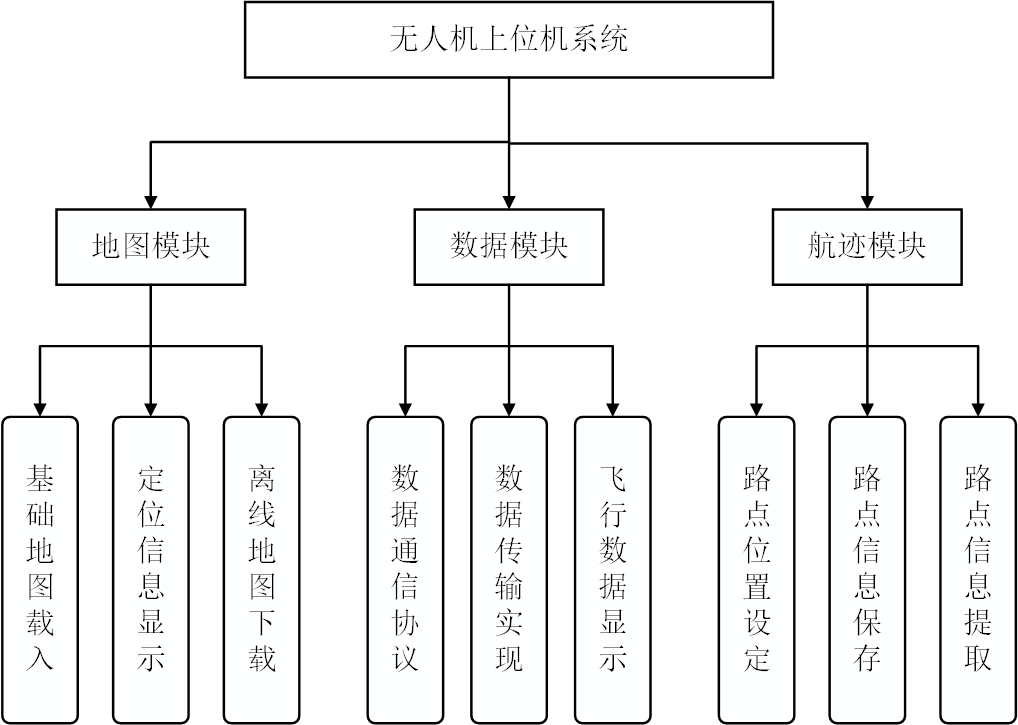
2.3 功能模块设计方案 9
2.3.1地图模块 9
2.3.2数据模块 10
2.3.3航迹模块 10
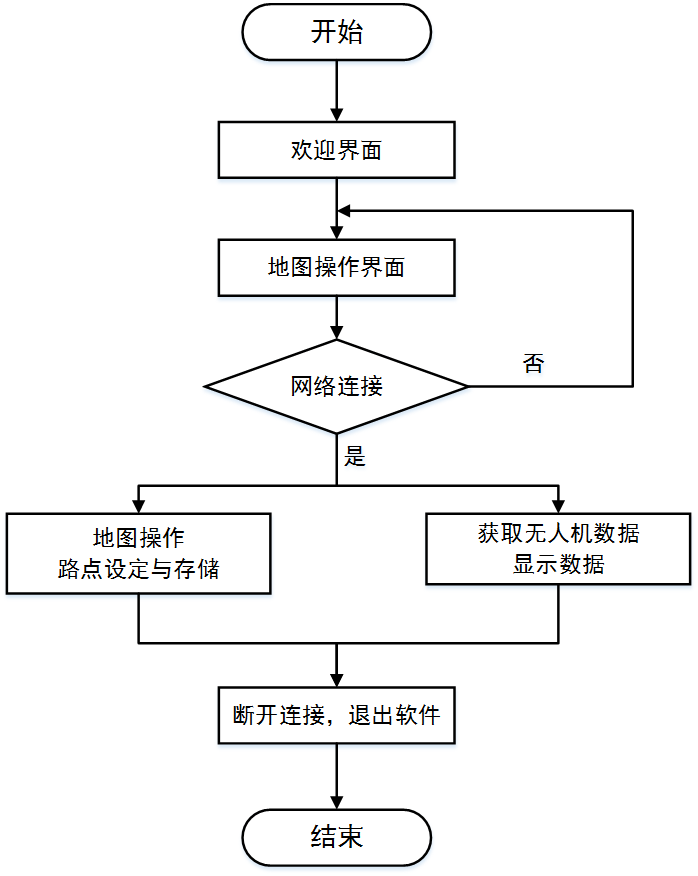
2.4软件使用流程规划 10
3相关技术支持 11
3.1安卓开发平台 11
3.2高德地图开发 13
3.3网络进程通信 13
4软件设计与实现 14
4.1软件开发环境搭建 14
4.1.1 Java开发环境搭建 14
4.1.2 Eclipse软件与开发工具包 15
4.2地图模块设计 17
4.3数据模块设计 19
4.3.1移动终端的Socket通信方法 19
4.3.2数据接收显示 20
4.4航迹规划模块设计 21
5系统测试 23
5.1 软件测试环境 23
5.2 功能模块测试 23
6总结与展望 25
参考文献 25
致谢 27
基于安卓系统的无人机上位机设计
李宝明
,China
Abstract: With the rapid development of UAV technology in recent years, the monitoring system related to UAV has gradually become the focus of people's research. The traditional UAV monitoring system is also known as ground control station(GCS), refers to the ability to monitor the UAV flight real-time status, to ensure that UAV safe and reliable. Yet the ground station system itself has complex operations, poor portability and other shortcomings. This paper designs a UAV based on the intelligent terminal Android operating system, through the network transmission protocol TCP / IP protocol and simulated UAV server to achieve data transmission, with the GaoDe map development platform to achieve the location of intelligent terminal. In the real machine test conditions, can successfully achieve the above functions. It provides an efficient and convenient platform for the further study of the UAV control system.
Key words: UAV;Android System;Host System;Digital map
1绪论
1.1研究背景及研究意义
1.1.1 无人机及其发展历程
无人机(Unmanned Aerial Vehicle,缩写UAV)是指可以利用无线电遥控设备和程序控制的由动力驱动的,可重复使用的无人驾驶飞机[1]。将无人机按照技术的角度分类,主要可以分为无人飞艇、无人垂直起降机、无人固定翼机等各种不同机型,每种不同的机型都有其独特的用途。
无人驾驶飞机的概念最早诞生于第一次世界大战时期,由于当时许多的技术问题没有得到解决,所以1917年历史上第一架由英国人研制的小型单翼无人机实验以失败而告终。随后的几十年里,英国人虽然成功研制出了用于军事训练的无线电操纵靶机,但无人机技术的发展陷入了僵局,导致无人机一直没有在其它领域得到相应的重视。直到1960年以后,美国开始了研发无人机的新思路,首先就将无人机的用途由无人靶机向侦察机方向转变,并由此研制了一批例如RQ系列的无人侦察机型号,在后来的局部战争中发挥了极大的作用[2]。到了20世纪80年代以后,随着很多技术领域的快速发展,例如计算机技术、通信技术、控制技术等,无人机正逐渐朝着外观小型化、飞行长航时化、控制远程化等方向发展。目前,世界上研制成功的无人机大约有数千种不同的类型,预计在不久的将来仍会有各种不同型号的无人机问世。
无人机用途的转变意味着无人机技术不再只满足于军事方面的应用,对于近些年很多军用技术开始呈现向民用方向发展的趋势,无人机技术就是其中典型的代表[3]。军事上用于侦察的无人机在民用上逐渐转化为航拍机、植保机,并因此有一大批创新型的企业跟上了研发无人机的步伐。无人机技术的民用带来的不仅是科技的发展,也在一定程度上说明了技术民用化以后为人们生活带来的改变。这也是为什么无人机自问世以来就受到世界各国的追捧的原因,也说明了我们对无人机及其技术的研究是有重要意义的。
1.1.2 无人机地面站
传统的无人机系统一般由无人机主体,地面控制系统和负责通信连接的数据链路三个部分组成。其中地面站控制系统是无人机系统的重要组成部分,它主要包括可以控制无人机飞行状态的操纵装置和显示无人机飞行数据的地面站控制软件两个部分。自从无人机技术问世以来,无人机地面站控制系统也一直是各国科研机构研究的重点。近些年随着计算机技术的飞速发展,无人机地面站由最初的对一个无人机的简单操作可以发展成为一个无人机地面站控制多架无人机飞行状态的完整系统。
为了能够远程监控无人机,研究人员设计了多种多样的无人机地面站控制系统。地面站控制系统的重要组成部分之一的地面站软件也随之变得功能越来越丰富,不仅可以显示无人机飞行数据,也可以预测下一步的航迹。地面站软件通过负责通信的数据链路接收无人机传感器发出的各类飞行参数,并对这些数据进行处理,转化为可视化、可度量的数据提供给操作人员。根据这些传输来的数据,操作人员给出合理的飞行指令,让无人机可以成功实现起飞、暂停、加速和降落等操作。现代无人机的新型应用还要求无人机地面站能够处理各种未知的突发状况,适应各种环境,研究人员就对无人机地面站提出了新的要求[4]。预计未来的无人机地面站的功能将会更加完善,数据传输将会更加可靠准确,对环境的适应性将会更强,能够在极端复杂的环境下工作。
传统的无人机地面站系统实物如图1.1所示,该地面站系统包括计算机软件、通讯界面和操作装置等。

图1.1 无人机地面站实物图
1.2国内外研究现状
无人机地面站控制系统已经成为很多国家与地区的科研机构和高等院校研究无人机技术的一个重要途径[5]。同样的,他们在研究的过程中也取得了很多的研究成果。如今国内外已经推出了很多的地面站控制系统,下面主要从PC端和智能移动终端两方面地面站系统软件所取得的研究成果介绍。
1.2.1基于PC端的无人机地面站软件
GroundPilot是由美国UAV Flight System无人机研究公司开发的一款地面站软件[6],其界面示意图如图1.2所示。从图中可以看出,界面上左上方是用来显示航迹的电子地图,界面左下方是操作人员规划任务航点,形成预设航线的航点管理区,界面右方是虚拟仪表和显示控件,主要用于显示飞行器的飞行状态数据。该地面站软件主要适用于其公司自主研发的AP40和AP50自动驾驶飞机,能够实现接收并显示无人机的飞行速度、飞行高度、飞行姿态角等参数,与此同时,还可以实现控制无人机的飞行姿态[7]。总体来说,这是一款功能全面的经典地面站软件。
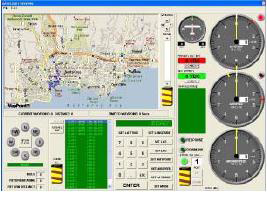
图1.2 GroundPilot界面示意图
介绍国外的无人机地面站系统之后,再说明一下国内对这方面的研究现状[8]。GCS300地面站软件就是完全由北京航空航天大学IFLY智能技术研发团队自主研发的,其界面示意图如图1.3所示。该地面站软件的研发主要是用于iFLY自动驾驶飞行器,可以通过其中一个地面站向其他15个地面站发送数据,实现分时控制无人机的数量最多可达到16架。

图1.3 GCS300界面示意图
除了高等学校对无人机地面站系统的研究外,还有很多新兴的无人机企业也开发出许多具有代表性的地面站系统软件。其中成都纵横自动化技术有限公司的APCommander地面站软件是其中的典型代表,其界面如图1.4所示。在这个界面可以通过虚拟技术实现对无人机实时状态的模拟观测,还可以对无人机的航迹进行详细的规划[9]。

图1.4 APCommander界面示意图
1.2.2 基于智能终端的无人机上位机
目前大多数的民用无人机都应用在航拍领域,很多企业在研制最新款式的航拍机的同时,为方便用户的使用,也会配套开发一系列基于智能终端的无人机控制软件,下面主要介绍两款基于智能终端的无人机控制软件。
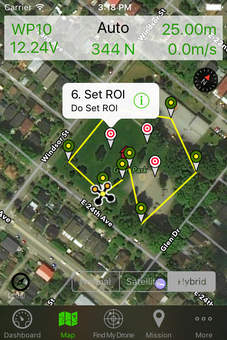
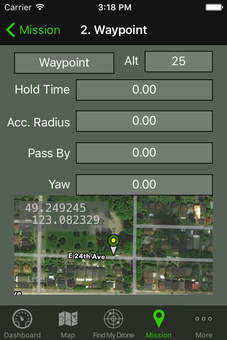
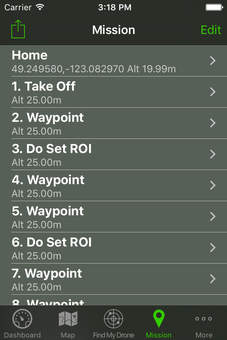
2016年11月,飞马机器人公司发布了一款无人航拍机,同时也发布了与无人机配套使用的手机应用软件J.ME Fly。该软件的界面示意图如图1.5所示。通过这个智能终端的应用程序,用户可以在新手模式中学习到操作无人机的方法,可观测到无人机的飞行状态,最重要的是可以在实际环境中拍摄画质清晰的照片。

剩余内容已隐藏,请支付后下载全文,论文总字数:20291字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

