论文总字数:19575字
目 录
1 绪论 1
1.1 研究背景 1
1.2 多足仿生机器人的研究现状 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 4
1.3 本论文主要的研究内容 5
2 机构设计与步态分析 6
2.1 引言 6
2.2 六足纲昆虫运动原理分析 6
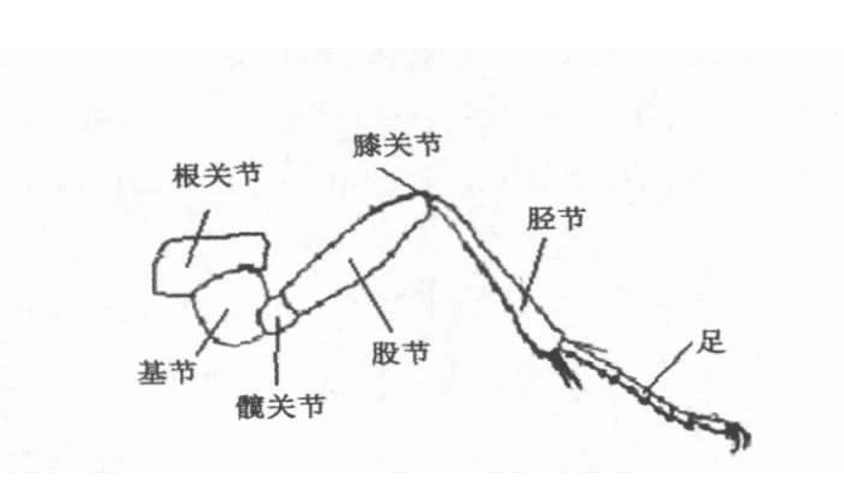
2.2.1 六足纲昆虫的结构 6
2.2.2 六足纲昆虫步态分析 7
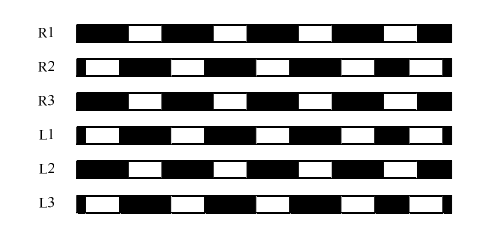
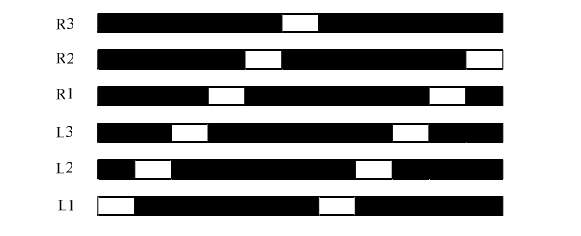
2.2.3 典型步态分析 7
2.3 六足仿生机器人结构分析 10
2.3.1 Solidworks简介 11
2.3.2 基于Solidworks 的六足机器人三维建模 12
2.4 六足仿生机器人步态规划 14
2.4.1 六足仿生机器人直行步态 14
2.4.2 六足仿生机器人定点转弯步态 15
2.5 小结 16
3 基于Solidworks和ADAMS的联合建模 17
3.1 ADAMS机械系统动力学仿真软件介绍 17
3.1.1 ADAMS的定义和概述 17
3.1.2 ADAMS的组成 17
3.1.3 主要运用的模块 18
3.2 ADAMS仿真软件的使用 20
3.3 六足仿生机器人的模型建立 22
3.4 小结 23
4 六足仿生机器人的运动仿真 24
4.1六足仿生机器人直行仿真 24
4.1.1 添加驱动函数 24
4.1.2 仿真结果分析 25
4.2 六足仿生机器人右转弯仿真 28
4.2.1 添加驱动函数 28
4.2.2 仿真结果分析 28
5 结论 30
参考文献 31
致谢 32
多足机器人仿生控制研究
陈俊逸
,China
Abstract:At present, with the development of science and technology, robot technology is more mature, more and more species, robots have been applied to all areas of life to, but for the walking robot, especially on the multi legged bionic robot is relatively small, and the body structure and control method of bionic multi legged robot is a simulation of multiped animal research, to walk more and more stable.
This paper mainly introduces the basic concept, the working principle of multi legged robot, time of occurrence and development of multi legged robot applications in our life and industry. In this paper, six legged robot as the representative, imitate the structural characteristics of the six foot class insects and the movement way of the robot to establish and modify the model by the three-dimensional modeling software SOLIDWORKS using ADAMS dynamic simulation software of mechanical system dynamic simulation of the construction of the robot were simulated straight and turn the specific data, verify the design of the bionic robot is reasonable and practical. At the same time, some problems of design and control are obtained by simulation, which provides a reference for the robot's physical prototype.
Key word:Bionics;Myriapod;ADAMS;SOLIDWORKS
1 绪论
1.1 研究背景
仿生学(Bionics)创立于20世纪60年代,它是由生物学和工程学两门学科相联合而产生的一门新的学科,它由机械工程技术科学和生命科学互相学习、相互补充而成的,在当今社会仿生学的应用无处不在,被应用到我们生活中的各个领域,如:医药,航空,汽车,建筑等,而机器人学是其中一个非常重要的分支之一,而仿生机器人学则是目前为止将机器人学科发展到了极致,它是一种模拟动物的身体结构和行为方式的一种新的学科,利用机器科学来模拟建造一个类似动物的机器人[1]。
在当今这个社会,由于科学发展和人类需求的不断提高,人们所面临的挑战也是越来越多,很多工作需要人们冒着生命危险去完成,有的甚至是人类无法完成的,如外星探测、军事作战、地震火灾救援、微创手术、海底探测等方面。想要在这些特殊的地形上完成独立探测,人们一般会使用两种设计的机器人,一种是像汽车和坦克一样的机器人,它们依靠的是轮子或者是履带通过与地面的摩擦来推动机器人前进,还有一种就是模仿人和其他有腿的动物一样依靠脚和腿与地面的间接性接触使机器人前进,从中可以很明显的看出依靠轮子和履带前进的远远不及足式机器人灵活,它只能在地势平坦的地面上前进比如在平坦的公路,或者是泥泞的土地上,它能够以一个较快的速度前进,但是如果在前进的过程中遇到了比自己大的石头或者倒下的树木时它们就会显得十分无助,失去了前进的方式,但是对于多足机器人来说在平坦的地面上可能不如它们跑的快,但在面对这些障碍物的时候变得十分轻松,而且因为用的是腿就会在前进过程中显得比较灵活,能够像人一样跨过障碍物,这样就使得足式机器人相较于轮式或者履带式机器人有着无与伦比的优越性,在适应自然环境方面更有优势,成为了现在科学研究的一个很重要的研究方向[2]。
仿生多足机器人的研究离不开普通机器人原先的研究成果同样也加入了仿生学的一些理论,模仿了一些特殊生物的结构和控制方法,生物在自然环境中有着几亿年的进化历程,有着难以置信的野外生存的能力,特别是节肢动物更是表现出了惊人的适应能力,无论是在沙漠、丛林、沼泽、海洋甚至是人类活动频繁的地区都能找到它们的身影,它们以其灵活的躯干肢体结构,简单迅捷的控制方式以及顽强的生命力让科学家们为之惊叹,也成为了多足机器人构造和控制方式灵感的根本,但是加拿大的著名科学家J.Angeles说过:“步行机器人的技术发展要遥遥领先于关于它的基础理论的研究”[11],这句话的意思就是:虽然很多机构已经通过仿生学设计出来符合要求的机器人的结构,但是在如何控制机器人的方面还是有很多的问题。于是现在主要的目标就是对多足动物进行大量的研究,从仿生学的角度观察他们是如何在野外面对恶劣的自然环境和天敌的,以及它们如何控制自己行动的方法,这也将是以后多足仿生机器人结构和控制理论研究的方向[3]。
多足仿生机器人的类型多种多样,其中以双足,四足,六足和八足机器人为代表,而本文以六足机器人为例进行了一系列的结构和控制的研究。六足仿生机器人和双足和四足机器人进行对比发现六足机器人在稳定性方面更加突出,能够适应各种恶劣的自然环境,并且六足机器人在步态研究方面具有更多的控制方法,由于具有六条腿结构,即使在失去一条腿的情况下机器人依旧能够稳定工作,能够按时完成给予它的任务;相对于八足机器人来说它的结构和控制方法又更加的简单,没有过多的腿的结构,在行走控制方面也更加的简单,因此,六足仿生机器人的研究和开发拥有很长远的意义[3]。
1.2 多足仿生机器人的研究现状
1959年美国制造出了世界上第一台机器人(完全使用机械而并非人力参与),在今后的60年里,机器人一直是科学家们夜以继日的研究方向,第一代机器人的发明主要是为了解放人类的双手大多被应用与工业生产;第二代机器人则是为了实现一些人类无法完成的任务主要是通过远程遥控来对机器人进行控制与第一代相比它更能满足人类的需求;第三代机器人就是智能机器人了,也就是我们常说的AI,它具有人类或者动物的某一些特点;第四代机器人则是我们现在提到的仿生机器人了,而它的出现就是机器人发展历史上目前最高的一个阶段了;再从仿生学的的角度来看,仿生机器人就是把仿生学和机器人科学完美的结合在了一起。从根本上讲,仿生机器人就是指利用各种基本的元器件和有机功能体一起组建起来的在无论是从身体构造和行为方式等多个方面并且具有生命形态从而可以在非结构化的环境中灵活、稳定的完成各种任务的机器人系统[1]。
1.2.1 国外研究现状
1989年六足机器人Genghis在麻省理工学院诞生,如图1-1所示,它被设计出来的主要作用就是对外星球进行探测(比如火星),Genghis全长大约35cm,每一组横向腿之间的距离约为25cm,它的体重为1kg,每条腿通过腿和关节与身体相连接,每一条腿都拥有两个自由度,都安装在机器腿的关节处保证腿能够自由转动,身体上安装有倾角罗盘,触觉传感器以及红外线视觉传感器,能够在非结构化的地面上行走[5]。随着技术的成熟,MIT于20世90年代初复制性的研制出了新一代的Attila,如图1-2所示[12],它是Genghis的后代,由于是基于Genghis发展而来的,身长35cm,立宽30cm和它的前代相比它的每一条腿都有3个自由度,它比Genghis多出来一个自由度,所以在行为方面它更加的灵活,行为方式也更加多元化可以完成之前一代机器人无法完成的动作,它整个身体拥有150个传感器,23个驱动器,以及11个处理器,使用了这么多的传感器使得机器人的每一条腿都可以进行独立的控制,具有强大的应变能力和行动能力[8]。


剩余内容已隐藏,请支付后下载全文,论文总字数:19575字
相关图片展示:


该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

