论文总字数:17083字
目 录
1绪论 1
1.1机械臂概述 1
1.1.1机械臂研究的意义 1
1.1.2国内外机械臂的研究现状及发展趋势 2
机械臂发展几十年以来,我们可以看出未来机器人研究的一个总体方向,那就是高精度,高集成化,高自动化的方向,因此,我们对于机器人的研究还需要很长一段时间。 4
1.1.3机械臂的分类 4
1.2机械臂控制的研究内容 5
1.2.1机械臂的驱动方式 5
1.2.2机械臂的机械结构 5
1.2.3机械臂的控制器 6
1.2.4机械臂的控制算法 6
1.4本文的主要工作 6
2、基于SolidWorks的机械臂模型的设计 7
2.1 solidworks简介 7
2.2 机械臂模型的设计 8
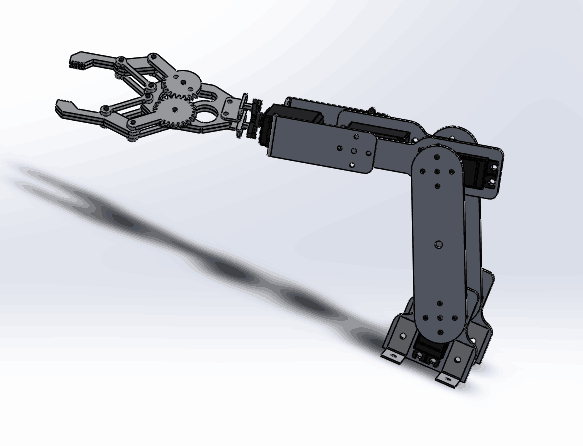
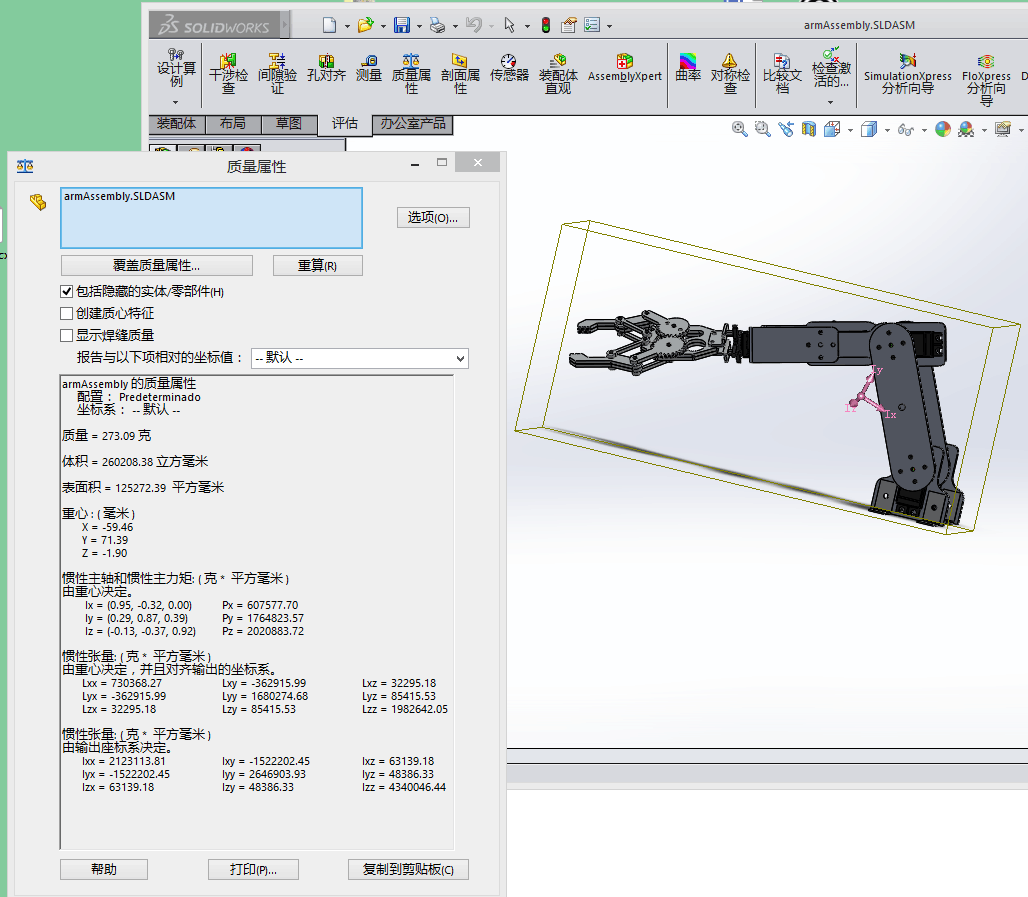
2.2.2 基于solidWorks设计出机械臂模型 8
2.2.3 机械臂的组成 9
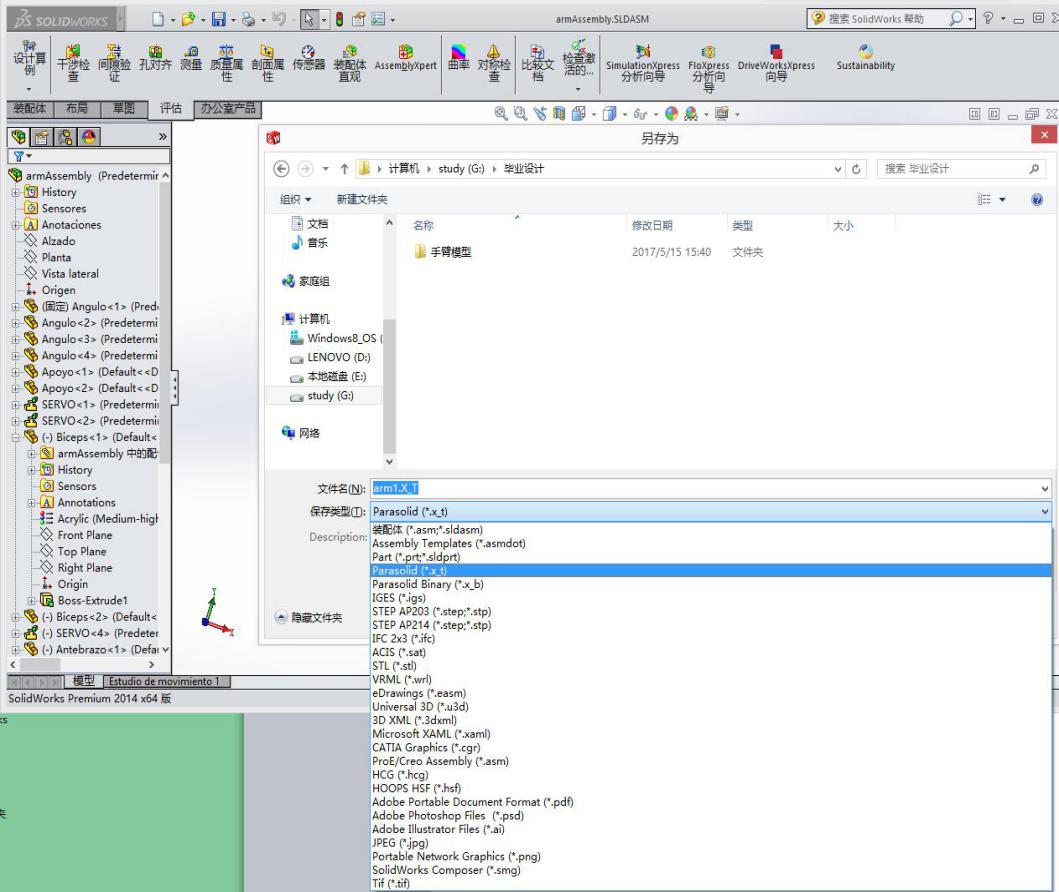
2.2.4 保存模型 11
2.3本章小结 12
3、基于ADAMS的模型设计 13
3.1 ADAMS机械系统动力学仿真软件介绍 13
3.1.1 ADAMS简介 13
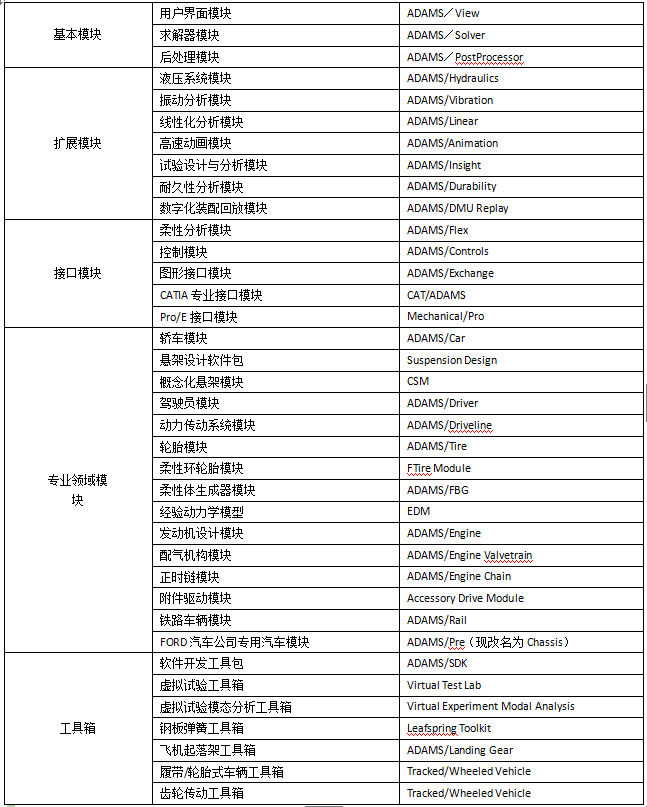
3.1.2 ADAMS虚拟样机模块组成 13
3.1.3 主要用到的模块 14
3.2 仿生机械臂的虚拟模型设计 16
3.2.1 机械臂关节运动副的形式 16
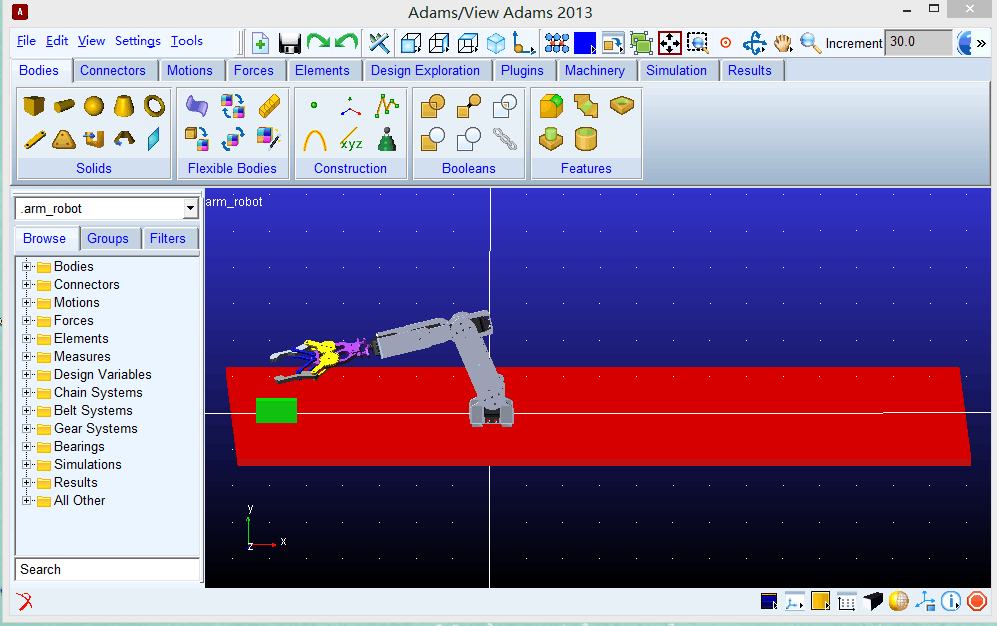
3.2.2 将模型导入ADAMS虚拟样机中 17
3.3 创建运动平面和搬运对象 18
3.4 本章小结 18
4、仿生机械臂的运动仿真 19
4.1 仿生机械臂的运动仿真 19
4.1.1 机械臂的运动规划 19
4.1.2 驱动函数的添加 19
4.1.3 仿真结果分析 20
4.2 仿真结果分析 23
4.3 遇到的问题以及解决方案 23
4.4 本章小结 24
5、 结论 25
参考文献 26
致谢 28
1绪论
1.1机械臂概述
1.1.1机械臂研究的意义
早在很多年前,远古人类为了摆脱沉重的牢力的束缚,便开始制造出一种可以代替他们工作的替代品,这就是如今的机器人。例如古希腊诗人荷马,他所撰写的诗《伊利亚特》中描述了神灵赫菲斯托斯用黄金锻造出一个女仆[1]。从古至今,人们也一直在努力的想把这些神奇的神话故事变成可能。从1958年制造出第一台真正意义上的机器人以来,人们在机器人方面的研究也越来越多,到如今,对于机器人的应用已经在很多行业都得到了充分的应用包括用来生产以及科研项目[2]。如今,机器人技术已经能够代表一个国家的工业生产水平,各国对于机器人的竞争也愈加的激烈[3]。
机器人,无可厚非,就是能够代替人类来完成一些指定任务的并且完全能够倍人类控制的一种机械,机器人技术包括了许多当前世界上的高端技术,其中包括计算机学、机构学、控制论学、信息与传感技术、人工智能、仿生学。是当前研讨火热以及应用日益广泛的一个重要领域。20世纪60年代初期,第一胎机器人由美国制造了出来,这时候的机器人,便已经表现出了相当成熟的技术优势。之后经过了大半个世纪的发展,机器人变得越来越产业化,我们已经能够在各种场面上见识到机器人的存在了。这时候,一个国家的自动化工业的强弱往往是看这个国家机器人技术的强弱来决定了。
机械臂式最近几十年才发展起来的一种新型的自动化设备,对于机械臂的控制,我们可以通过软件编程来实现对他的控制,他能够做到大部分人能够做到的事情,而且对于环境的适应能力很强,能够完全实现智能化。由于机械臂的优越性很强,所以在各个领域的应用越来越多。越高级的机械臂,能够实现的功能也越来越多,应用也会越多[4]。将机器臂运用于工业生产过程,除了可以提高生产率之外,还可以解放劳动力的双手,让机器人来进行生产作业,实现完全的自动控制。所以在近段时间内对于机器人的应用越来越广阔[5]。
机器人的研究主要是研究三个方面,包括机械臂、手和腿。研究的同时是将几个方面单 独研究的,而研究最多的就是机械臂。大概二三十年前,人类开始了机械臂的研究。其中开始研究的是斯坦福大学以及麻神理工学院这样的名校。最早的想法源自数控机床和电遥控,通过有效的结合这两门技术,于是就产生了如今的机械臂。
目前,机械臂应用广泛于工业领域。机械臂大体分为手部关节、腕部、大小臂、腰部和机座底座六个部位,由于他们主要的连接方式是串联,因此也称之为串联机械臂。其实,串联机械臂就是一种连杆机构,是通过关节将连杆连接起来的。考虑到机械臂主要是应用于简单的制造用途和控制操作,因此只包含移动关节和旋转关节以及相互垂直和平行的轴线
1.1.2国内外机械臂的研究现状及发展趋势
美国最先开始研究机器人是在第二次世界大战之后,随后在亚洲以及欧洲地区的工业生产中的用途也是越来越多。1997年,美国研制出了机器人探路人,用于火星表面的勘察作业,得到了大量的火星上面的数据,为人类对于火星的研究工作做出了巨大的贡献[10];2003年,美国向火星发射目前为止最先进的机器人“火星探路人”并且顺利的着陆火星,,他使用双眼立体视觉导航,,他能够探测出火星上的生命体,至今已经为人类传回无数珍贵的影像资料[11];2005年,美国研制出一款军用机器人,他能够与敌人面对面的进行交战,操纵者通过机器人自带的摄像机确定敌人的位置,然后通过按钮进行火力打击[12];英国制造的排爆机器人,经过仪器确认好爆炸物的位置后,然后远程操纵排爆机器人到达爆炸物位置进行排爆工作,这样就保证的人员的安全,机械臂的组成包括三个短臂,可以在空中和地面以及地下进行工作;日本本田公司开发出的双脚步行机器人“阿西莫”,它成为世界上第一个真正会跑的机器人。“阿西莫”最快可以达到比较快的奔跑速度,另外,他的工作原理是通过传感器得到信息,从而再和自身的信息库相综合,这样就可以自动的寻路并且避开路障[13]。
中华名族对于机器人的研究相对也很早,从20世纪中后期开始就开始机器人的研究,并且在八十年代后有了很多的收获。自从国家成立了相关的计划之后,机器人技术得到特别的注视,由此中国在机器人领域取得了高速发展,研制出了各种各样的机器人用于许多工业生产上面以及一些军用机器人和特种机器人。中国科学院自动化所自主研发设计制造出了全各方位可移动的视觉导航机器人CASIA-I,CASIA-I主要是通过传感器和控制器来工作的,传感器的设置在机器人的底部和中间双层之间,其中分别有十六个触觉红外传感器以及十六个超声传感器和十六个红外传感器,机器人的顶部配备有录像机,这样,机器人就在多传感器信息的结合下形成了对四周环境的感应作用【14】;此外香港城市大学推出的服务机器人,自带导航能力,其技术水平已经达到了相当高的高度。中国科学院沈阳自动化研究所研制出的蛇形机器人,拥有自主产权,获得了国家的高度重视,这款蛇形机器人,可以用来勘探地下人所到达不了的地方,比如地震后的坍塌区域的地下搜索任务以及矿洞的人员搜索,能够有效的进行人员的救援【14】。2008年7月15号,对于北京首都机场来的客人来说是个特殊的一天,因为这天,首都机场迎来了我们可爱的奥运福娃机器人,可爱的福娃机器人专门来接送来自国内外的客人,他能够为客人提供很多服务,行李托运/行李提取以及提供问询解答服务,奥运福娃机器人拥有超高的自主判断能力,它是由中国民航大学研制出来的。
机械臂发展状况概括如下:
第一代机械臂,是指只能按照人已经设定好的路径来运行的机器人。这类机器人目前在市场上应用最多的,广泛的被用来进行工业生产以及其他很多方面的工作。因为这类机器人没有自己的感应系统,因此他的应用也有着很大的局限性。
第二代机械臂,是指已经拥有的自己的感应能力,从而做出相应的反应动作的机器人。这时候,机器人技术已经达到了一个新高度,因此,对于机器人技术的研究更加火热起来了。
图1-1 一汽“红旗”轿车机器人焊接生产线
第三代机械臂目前还处于一个研发完善的阶段,还需要做好多的工作才能研发出一套完善的机器人系统,这类机器人在第二代机器人的基础上添加了自主的决策能力,能够在周围环境变化的同时做出决策,这时候的机器人已经能够向一个正常人一样做出一些决定了。[6]。
图1-2 演奏机器人
机械臂发展几十年以来,我们可以看出未来机器人研究的一个总体方向,那就是高精度,高集成化,高自动化的方向,因此,我们对于机器人的研究还需要很长一段时间。
1.1.3机械臂的分类
机械臂的分类一般的情况下是按照坐标形式来分类的,这样分可以分为四个大类型。这四种类型就包含了所有种类的机器人。四种类型分别是:
(1)直角坐标式机械臂:直角式的机械臂一般是由多个臂组成的总体结构,顶端的手爪部分有的是由旋转关节构成的,这种机械臂操作起来十分简单,比较通用,但是他的体积很大,需要很大的地方用来摆放,所以不是很方便。
(2)圆柱坐标式机械臂:圆柱式的机械臂的精确度没有直角式机械臂好,它是由活动关节连接起来的,然后通过一个转动关节来固定手部位置,这种机械臂操作起来也十分简单,比较通用,但是体积很大,太占地方。
(3)极坐标式机械臂:极坐标式的机械臂是通过转动关节来固定位置,相比较其他几类机器人,这类机器人的体积比较小,所需要空间很小,组成部件很小,就是平衡能力有一些问题。
(4)多关节式机械臂:多关节机械臂的各个关节都是可以转动的,与人的手臂的构造比较相似,是用的最多的。他的组成部件都听小的,所以不需要很大的地方提供给他,但是控制起来不是很简单,有点复杂。
图1.3~1.6是以上四种机械臂的模型。
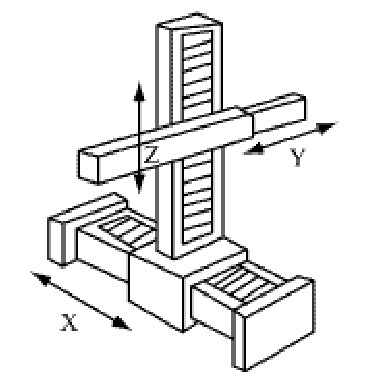
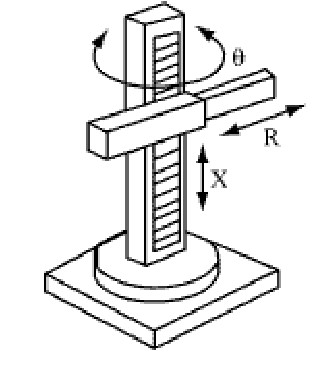
图1-3 直角坐标式机械臂 图1-4 圆柱坐标式机械臂
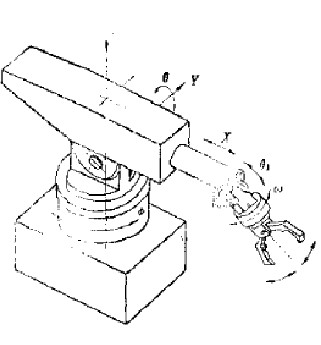
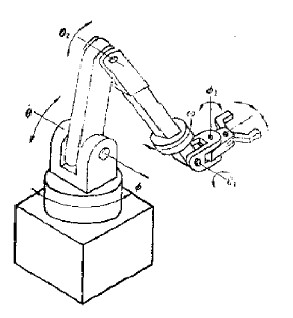
图1-5 极坐标式机械臂 图1-6 多关节式机械臂
1.2机械臂控制的研究内容
1.2.1机械臂的驱动方式
机械臂的运转需要驱动方式来给他提供动力,如果没有驱动系统,那么机械臂就不能够运动,机械臂的驱动方式分为四类,分别为以下四类:
(1)液压式机械臂:液压式机械臂主体部分是液动机,通过油箱中的液体产生动力,从而为机械臂提供动力[7]。
(2)气压式机械臂:气压式机械臂的主要部位是气缸,从而为机械臂提供动力。
- 电动式机械臂:电动式机械臂在目前工业生产中是被使用的最频繁的,他能提供的动力很大,驱动动力来源是靠步进电机产生动力。这种机械臂还可以调整速度[8]。
- 机械驱动式机械臂:机械驱动式的机械臂一般是由几个连杆结构来提供动力。
1.2.2机械臂的机械结构
剩余内容已隐藏,请支付后下载全文,论文总字数:17083字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

