论文总字数:18741字
目 录
1 绪论 1
2 PID控制简介 2
2.1 PID算法的起源 2
2.2 PID算法的发展 2
2.3 研究现状 3
3 模拟式PID 5
3.1 传递函数 5
3.2 算法中各项分析 5
4 数字式PID 8
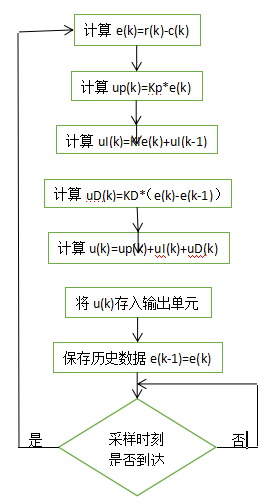
4.1 位置型控制算法 8
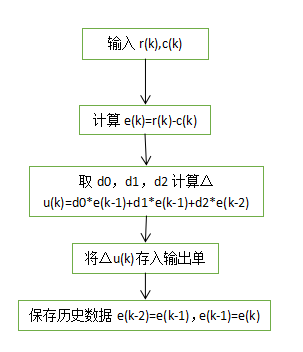
4.2 增量型控制算法 9
4.3 两种算法的比较 9
4.4 两种控制算法的流程图 10
5 实验测试 12
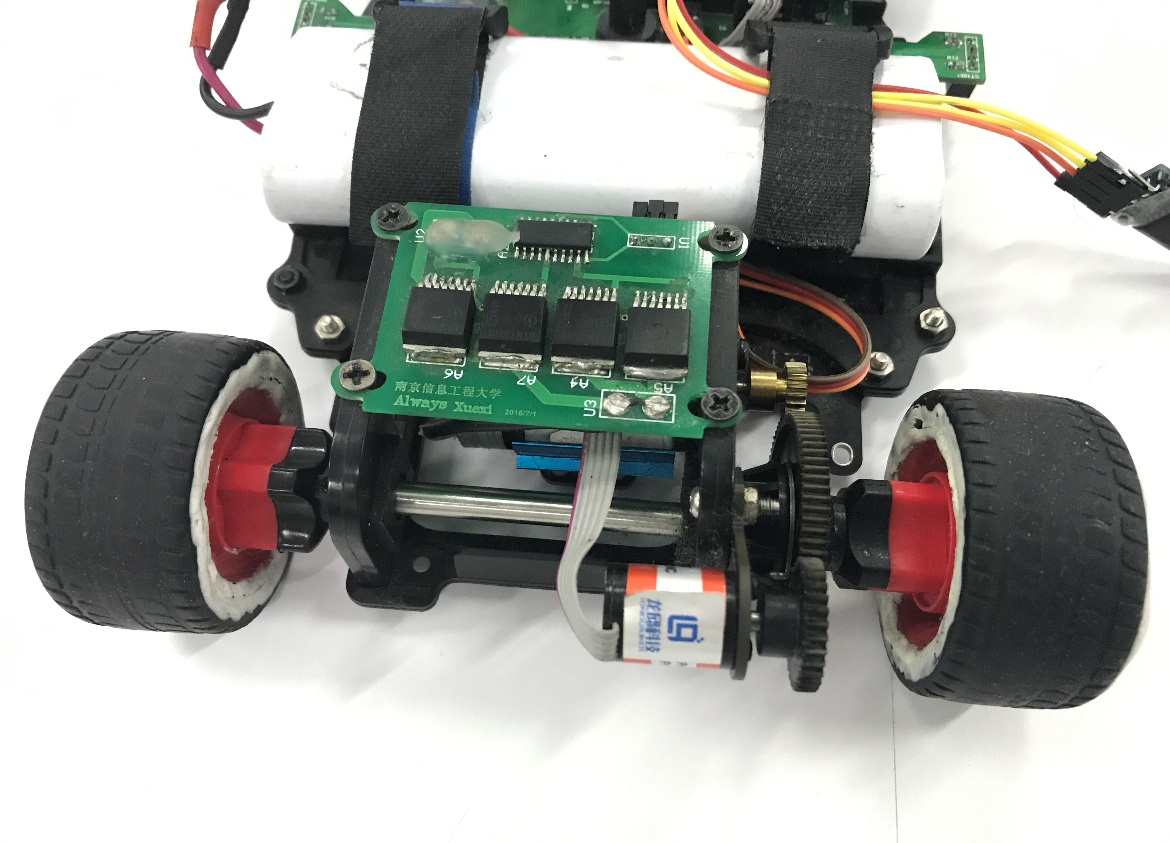
5.1 实验平台 12
5.2 智能车系统模块简要介绍 14
5.3 数据获取 15
5.4 人机交互接口 16
5.5 实验结果及分析 16
5.5.1 直道情形 16
5.5.2 弯道情形 17
6 结论 19
参考文献 21
致谢 22
基于智能车调速系统的PID算法分析
颜磊
,China
Abstract: The object in this paper is the widely used PID controller. PID is short for proportional-integral-derivative. It is easy to understand literally that three independent parts consist of this universal way of control. The article introduces the analogue PID briefly and puts emphasis on digital PID.
Because of different executives in the process of industry control, such as valve and stepper motor, A PID controller can be divided into two types. One is known as position PID, in this case, the output of a controller represents the actual position where the valve in this control system should move. The other is called incremental PID. Compared to the last controller, the output of a incremental PID controller it the increment which is based on the last position of the executive.
This article uses MATLAB, a widely used software in research to explore three components respectively. This performance aims at figure out the physical meaning of three parameters in PID. In the following experiment on an intelligent vehicle which is used to take part in a national contest, the PID algorithm turns out to be very useful and convenient.
Key words: Industry control; Digital PID; velocity control on intelligent vehicle
1 绪论
PID是一种在工业控制系统中广泛使用的控制反馈环机理。最近这些年,很多复杂的控制算法被提了出来,比如自适应控制理论、鲁棒控制系统,并且在实际控制系统中已有应用。尽管已经有了这些复杂微妙的控制算法,但是,相对简单点的PID控制器仍然在工业控制过程中广泛使用。据估计,超过百分之九十的控制环使用PID控制,且往往微分系数设置为0(PI控制)。它的广泛使用,促进了不同PID精妙技术的发展,适应了复杂软件包和硬件模型的应用。
使用PID控制器之后,还要进行适当的参数调节。如果系数设置合理,即使系统参数没有全部掌握或不能全部测量出来时,控制效果也能大体上令人满意。
PID控制全称是比例-积分-微分,每一部分单独使用都能产生特定的控制作用。在实际应用中,有时积分项或者微分项前面系数设置为零而成为PD控制和PI控制[5]。
比例控制(P):单独的比例控制是最简单的线性控制算法。它的特点就是控制器输入和输出之间比值是一个常量。比例控制的数学模型的可变参数是Kp,通常称为比例增益。特殊地,当比值为1时,系统输出能够复现输入。
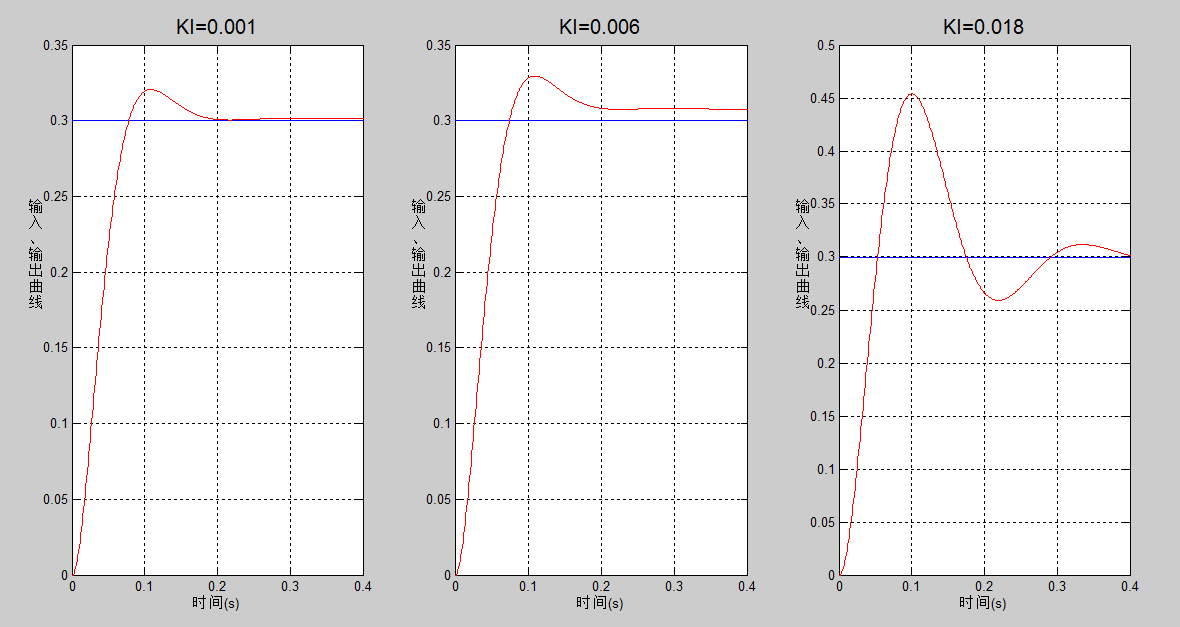
积分控制(I):积分作用的本质就是对控制过程中产生的偏差不断地求和,只要偏差不为零的话,控制器就能一直运算下去,直到误差为零为止。即便每次过程中产生的偏差很小,但偏差对时间积分过后,相当于不断的做累加运算,误差就会一直增大,它能够推动控制机构运作使系统向减小误差的方向运行。因此,积分作用的存在,是为了减小甚至可以消除系统的稳态误差,提升系统的精确程度。
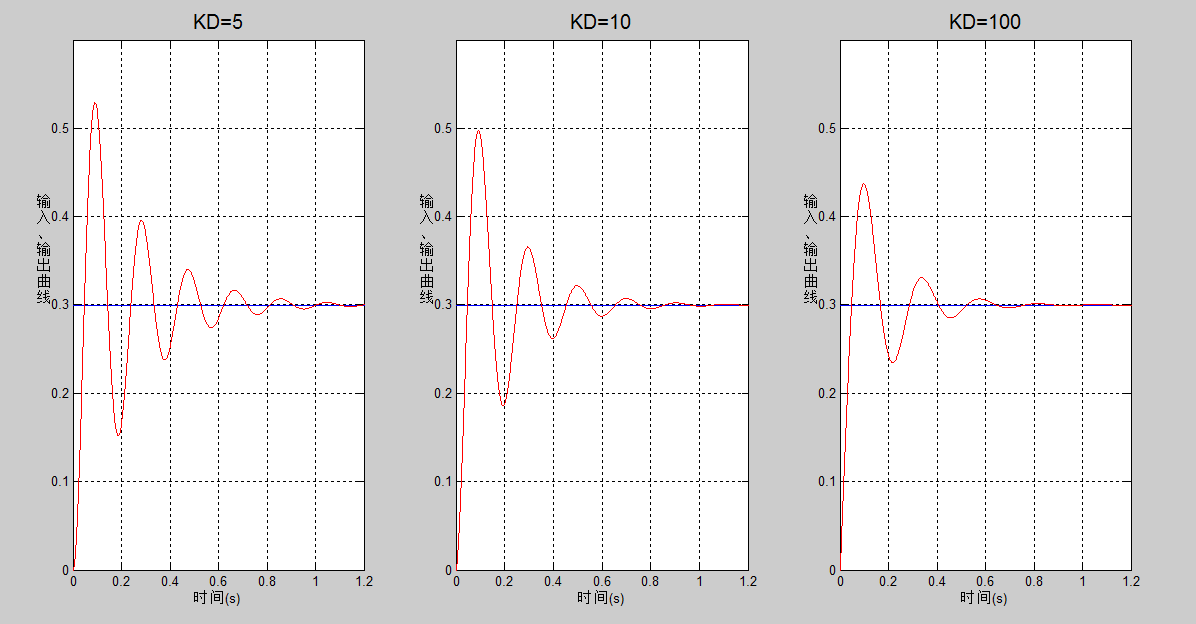
微分控制(D):在实际的自动控制系统中,都或多或少地存在不同的惯性环节或者滞后的器件,这就导致输出延迟,或者说,输出量的变化总是迟于控制量的变化。为了克服这一问题,往往在控制器中引入微分作用。微分项的作用在于对误差求导,能够预测误差的变化,加入控制器后能够提前产生控制作用。实际的工作系统由于外部干扰和参数调节不当,很容易产生震荡。微分作用能够有效地降低系统的超调,甚至使得系统从发散状态能够稳定下来。
2 PID控制简介
2.1 PID算法的起源
1939年,隶属于英维思集团麾下的美国福克斯波罗自动化仪器公司为了克服静态偏差的问题,他们设想出这样一种自动重置装置:这个装置每次在运行时,能够利用上一个时刻的偏差,自动地修改参数。这样,在系统偏差最终到达零之前,PID控制器会一直产生输出来减小偏差,控制系统偏差为零[1]。显然,这就是我们现在所说的积分作用。
就在同一年里,美国的泰勒器件有限公司发布了一款名为Fulscope的全新气动控制器。这一新仪器能产生一种称为“预动作”的控制作用,按照这一控制规律,控制器可以产生提前控制。像上面所说的“预动作”,实际上也就是微分作用。
上世纪三十年代,在英国诺夫威治市的帝国化学有限公司工作的考伦德和斯蒂文森等人,给出了一种PID控制器的设计方法,这种方法起初用于控制系统的温度,效果令人满意。于是他们不久就申请并获得了国家专利。
2.2 PID算法的发展
上世纪二十到四十年代,产生了现如今人们熟知的PID控制器。在工业控制过程中,PID控制器及其改进型,使用率高达90%。尤其值得注意的的是,1942年,美国泰勒仪器公司的西格纳,在一个开环系统中,运用实验的方法,分别单独研究了PID控制理论中比例、积分、微分这三个部分在控制中的特点和影响。紧接着,在1943年里,该公司的尼克尔斯等人也运用了相同的方法进行了测试,不同的是,他们是在闭环系统中进行的。至此,这是PID控制理论应用于时间之后,第一次提出如何来调整PID控制器的参数这样一个问题,这个问题也是至今为止,PID最普遍的问题。
随后的五十多年,通过科学家和工程师们的不懈努力,上面提出的参数整定问题得到了多元化的解决,并且提出了多种参数调整的方法。比如科恩—库尔恩响应曲线法,这一方法是研究系统的开环阶跃响应,从中获得系统的信息;比如西格纳—尼克尔斯连续响应法,这种方法和上面不同,它使用的是奈奎斯特曲线。但是,上面提出来的这些方法非常局限,它们只能运用一些结果图来识别系统动态信息中很少的一部分,并不能把参数调节到理想的状态。计算机的出现,大大突破了这一限制。应用计算机技术,尤其是人工智能这一领域,人们可以充分利用这一技术把工程师以及其他操作人员的控制经验当做已有知识输入到计算机当中[5]。这样,在一个给定的控制背景之下,计算机能够像真正的工程师一样,根据控制的实际情况,自动的调整PID参数。在这种思路下,计算机能够自动调节参数,使得参数整定的时间大大缩短,不仅在操作上更加简便,而且系统的响应特性也可以得到改善,从而自整定PID控制技术得到了推动和发展。这一技术大现于1950年前后,当时,自适应控制尚也只处在萌芽阶段。大约十年过后,有人设计出了过程控制器,这一控制器的优点在于能够实现自动调节。但不幸的是,它的价格比较昂贵,并且体积比较大,再加上可靠性不是很好,最终并没有商品化。到了上世纪八十年代,一方面,经典控制理论已经更加完善,并且基本使用于已出现的控制方式;另一方面,各方面性能都表现优越的微型计算机也开始普及,自整定控制理论因此得到了开发,渐渐地,PID控制参数的自整定技术也慢慢变为现实。
现如今,在参数调整方面,PID控制技术取得了很多成果。如预估PID控制、自适应PID控制、自校正PID控制、模糊PID控制、非线性PID控制等[4],它们能够利用高级控制策略来调整和优化PID参数。
2.3 研究现状
运用PID控制时,其精髓是对控制参数的设置。在当代,国内外对PID控制的研究,仍然把重点放在了参数整定方面。参数设定,一直是PID出现以后的核心话题。
继尼克尔斯和西格纳等人提出了PID参数整定方法之后,PID参数无论在手动控制方面还是在自动整定方面,都应用了许多技术。按照总不同的标准可以将它们分为不同类型。划分结果如下:
按时间先后:一开始出现的是常规PID参数整定方法,后来由于计算机的使用,出现了智能PID参数整定方法。
按被控对象数目:单变量PID参数整定方法,这是当今使用的最普遍的一种方法;多变量PID参数整定方法,这是为了应对更加复杂的系统,新兴的研究方法,也是最近的难点,
控制量组合形式:线性PID参数整定方法,这是经典的PID调节器,PID技术一出现的时候正是用的这种参数调节法;非线性PID参数整定方法,这种方法是由非线性微分器以一种非线性的组合方式构成的非线性控制器。
1988的6月17日年,由美国自动控制委员会主办的美国控制会议在亚特兰大市举行[24]。会议上,瑞典的奥斯特隆姆做了一篇题为《面向智能控制》的大会报告。报告中指出,当今的控制界,有两种新兴的控制思想,即自整定和自适应两种工业控制器。他的这一论断,奠定了智能PID控制的基础。按照他的想法,我们可以把自整定和自适应控制器看成是经验丰富的仪表工程师,所不同的是,PID参数的整定过程是自动化式的。它的整定过程是这样的,自整定控制器通过实验提取出系统的动态特性,根据动态特性决定何时使用以及使用PI还是PD控制,这样的话,自整定控制器就像人一样拥有推理能力。随着控制理论的发展,自适应PID在应用方面趋于多元化,使得研究其整定方法越来越重要。到现在为止,已经有了很多整定方法。但在这么多的方法中,有两种方法在实际的工业控制中表现要优于其他方法。第一种是基于模式识别的参数整定方法,它由美国的福克斯波罗推出。早些年的时候,Bristol在模式识别方面取得了一些成果,而这种参数整定法正是在他们工作的基础上进行的,此方法主要用于该公司的单回路EXACT控制器和分散控制系统的PIDE功能区域。第二种参数整定方法涉及到了继电反馈的原理。这种方法应用的实例很多,自整定、增益计划设定以及反馈和前馈增益的连续自适应等功能都包括在这类控制器中。它们被笼统的称为智能PID控制系统,因为出现的这些技术,极大简化PID控制器结构,性能也得到了很大改善[23]。
剩余内容已隐藏,请支付后下载全文,论文总字数:18741字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

