论文总字数:21935字
目 录
1 绪 论 1
1.1课题背景 1
1.2 课题研究的目的和意义 2
1.3 国内外研究现状 3
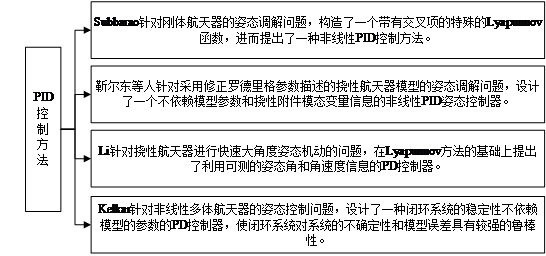
1.3.1 传统控制方法 3
1.3.2 现代控制方法 4
1.4 本文的主要研究内容 6
2 容错控制 7
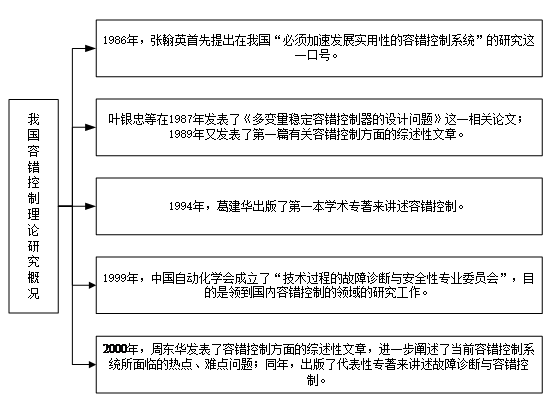
2.1发展历程 7
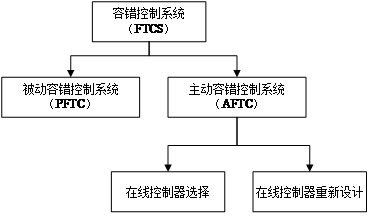
2.2 容错控制系统(FTCS) 7
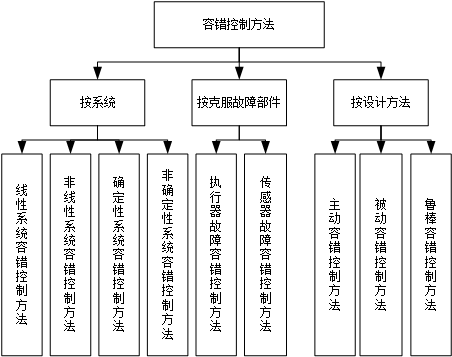
2.3 容错控制方法 10
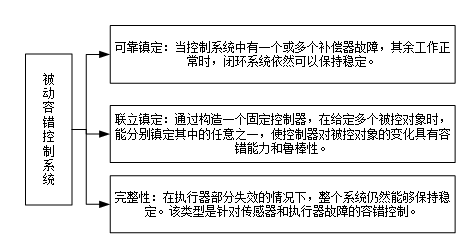
2.3.1 被动容错控制方法 10
2.3.2 主动容错控制方法 11
2.3.3 鲁棒容错控制方法 11
3 预备知识 12
3.1 Lyapunuov稳定控制理论基础 12
3.2 LMI工具箱 12
3.2.1 线性矩阵不等式表示 13
3.2.2 LMI程序命令介绍 14
3.2.2.1 lmivar 和 lmiterm 命令 14
3.2.2.2 feasp求解器 16
4 执行机构部分失效的挠性航天器的容错控制 16
4.1 问题描述 17
4.2 控制器设计和求解 19
5 仿真及实验 20
6 结论与讨论 25
6.1 结论 25
6.2 讨论 26
参考文献 26
附录 27
致谢 30
挠性航天器的容错控制研究
杨忠慧
,China
Abstract: In this paper, we select the flexible spacecraft as the research object. We have given the flexible spacecraft model in the paper using Lagrange method with the knowledge we have learned at the undergraduate level. Then we can give a more simple linear matrix equation to describe the flexible spacecraft model, and design the state feedback controller based on it. In design of the system, the failure factor is obtained, and a new system is obtained. Next, based on LMI method we can solve the controller and gain the matrix K. Finally, the matlab simulation is used to validate the effectiveness of the passive fault tolerant controller when the actuator partial failure happened to the spacecraft.
Key words:Flexible spacecraft, State feedback controller, Actuator partial failure, Passive fault tolerant control
1 绪 论
1.1课题背景
上个世纪六十年代初的时候,前苏联设计的第一艘飞船“东方号”成功升空,这是我们人类历史上第一颗成功进入太空的人造地球卫星,开启了人类进入外太空的大门。美国也不甘落后, 研制出了第一艘登月飞船“阿波罗”号,成功的将人送到了月球上。航天科技的迅猛发展,得益于人类探求未知空间的渴望,而航天领域技术的突破,为人类想要探索浩瀚宇宙太空的梦想开辟了蹊径。航天事业取得的一系列巨大成就让人类认识了地球之外的空间,极大的丰富了人类的知识宝库。
近年来在航天技术方面我国已经取得重大成就,集中体现了当前国家最新的、最前沿的制造、设计、工艺、材料研究成果。嫦娥奔月,以及神舟与天宫交会对接的实现,标志着我国航空航天进入了蓬勃发展的新局面。中国的航天事业开始于二十世纪五十年代的时候,虽然起步比其他的西方国家晚了一些,但发展速度较快。1970年由我国研究人员自主研发的第一颗人造卫星“东方红”(如图1.1所示)顺利地向外太空发射成功,这一壮举使得我国航空航天事业从此迈入了一个新的台阶,举国欢欣鼓舞。

图1.1 东方红一号卫星发射成功
5年之后,我们国家使用“长征2号”(如图1.2所示)将第一颗返回式卫星发射进了预计轨道,为之后的“神舟”系列载人飞船的成功奠定了基础。1992年的时候,我们开始对载人飞船进行研究,从此载人航天事业正式起步,这项工程后来被定名为“神舟”系列飞船。

图1.2 长征2号发射
从“神舟一号”试验飞船发射成功到真正载着人的“神舟五号”飞船第一次飞行的成功,这其中只花了四年时间,却再一次改写了航天史。之后,“神舟六号”到“神舟十号”的成功发射,再次证明我国已经拥有了过硬的载人航天技术。2013年,我国自主研发的第一辆月球车“玉兔”号的顺利登上月球,并超额完成使命。中国航天新的研究计划正在稳步进行中,而目前已取得的这一系列的成就成功令全球对中国的航天事业刮目相看。中国的航天人在国家高度重视航天事业的情况下,努力研发技术,赶超美俄。这是中国航天技术能够如此快的
发展的重要原因,所以现在的航天科技领域中,中国已经走在了世界的前沿。
1.2 课题研究的目的和意义
早期的航天器结构简单,也不需要执行太多太复杂的任务,所以在动力学研究中一般将其当作是刚体来进行分析处理。只是现在,人们的各种各样的需求,促使着航天科技的不断的向前发展,使得航天器到外太空执行任务时需要进行很多准备。而且绝大多数的航天器到外太空工作时,无法携带完全充足的能量源,因此太阳就成了必要的能量来源。而储存能量的结构就是安装在航天器外身的太阳能帆板。除此之外,航天器还必须携带探测器支撑桁架、天线、机械臂等结构。
相对于经典的刚体航天器来说,在展开各类其他任务的时候,挠性航天器动力学描述会更精确,更容易达到我们需要的精度。如果错误的使用了刚体动力学模型来进行描述,可能会有我们无法想到的、不利于航天器工作的情况发生。例如,美国的“探险者 1 号”卫星(如图1.3所示)虽然成功发射,开始时工作状态也正常,但一段时间过后,竟然出现了出人意料的卫星翻滚运动[1],最后导致的严重后果就是整个卫星任务无法完成。后来经过研究分析得出,发生这个现象是因为卫星带有挠性结构——天线,但是在对其进行姿态控制设计时,仍坚持理想刚体的假设,因此这个控制方案在理论研究上就出现了失误,在卫星运行中其姿态控制的准确性就难以得到保障。

图1.3 “探险者 1 号”卫星
轨道运行中的姿态可能会被多方面的因素影响,较大的一种来自其所搭载的各类设备仪器;反之,也会影响这些仪器的正常工作,这对航天器所需执行的任务是很不利的。同时,我们通过航天器在太空中来完成我们人类无法完成的工作的时候,对航天器的要求是随时代而改变的。新世纪的航天器几乎都需要携带着高级精密设备,来执行一些复杂任务。上世纪七十年代,对于卫星对地观测的指向精度要求仅仅为1°,而到了本世纪初则提高到不能超过0.001°这样的一个高度[2](具体如表1.1所示)。在航天器进入太空后,其身外的挠性结构——太阳能帆板就会打开,同时航天器是一直处于运动的状态的,这使得挠性结构也会一起运动,导致该结构会产生变化,引起振动,这对会产生对整个系统不容小觑的影响。所以,设计师在分析和设计对航天器的姿态系统的控制的时候,应当把很多东西都考虑进去。
表1.1 卫星对地观测达到的指向精度
时期 | 70年代 | 80年代 | 90年代 | 新世纪 |
代表卫星 | Seasat, Landsat-1 | STOP, Landsat-4 | ADEOS, JERS | Hilio-2, IRS-P |
指向精度/(°) |
|
|
|
|




我国航天事业紧紧跟随国际发展的脚步,并取得了可喜的成绩。2013年,“神舟十号”载人飞船与 “天宫一号”成功实现自动交汇对接,宇航员完美完成了他们的任务并成功返回地面。这一壮举使我国的航天事业踏上了一个更高的台阶,可靠和安全的航天器系统是这一切得以实现的大前提。因此,将来航天器的发展新趋势必然是如何使航天器在情况复杂多变的空间环境中的运行能力得到提高。而这其中最为重要的一环,就是对于执行机构故障的研究。
当前还没有出现一种能够阻止航天器部件发生故障的方式,尤其是执行机构故障的发生。但为了提高航天器姿态控制系统的可靠性与安全性,研究人员可以通过很多别的方式来达到目的。航天器执行器发生故障的主要原因是其在外太空高真空、强辐射环境下工作。产生这个故障后,航天器姿态控制的性能必然会降低,航天任务也有可能因此导致无法完成,同时航天器会受到损害,寿命减短,因此造成的损失不可预计。因此,研究执行机构部分失效的航天器被动容错控制问题,使航天器的工作状态保持稳定的重要性就凸显出来了。
1.3 国内外研究现状
剩余内容已隐藏,请支付后下载全文,论文总字数:21935字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

