论文总字数:47621字
目 录
1绪论 1
1.1研究背景 1
1.2国内外研究概况和趋势 3
1.3研究内容和论文结构安排 5
2系统方案设计 5
2.1 方案分析 5
2.2硬件方案设计 5
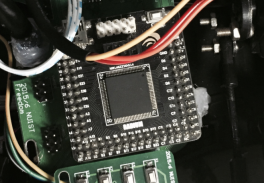
2.2.1微处理器模块 6
2.2.2传感器模块 6
2.2.3电机驱动模块 7
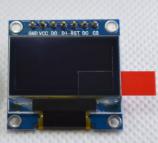
2.2.4 OLED模块 8
2.2.5蓝牙模块 9
2.3软件方案设计 9
2.3.1初始化 10
2.3.2图像处理 11
2.3.3控制算法 11
3电路设计 12
3.1 电路整体设计 12
3.2电源模块 14
3.3视频分离电路 15
3.4 电机驱动模块 16
4图像处理 17
4.1 开发环境介绍 17
4.2 图像处理 18
4.2.1 模式识别 18
4.2.2 图像处理 19
4.2.3 前瞻调节 21
5系统调试与分析 21
6 结论与展望 27
6.1 系统的实现结果 27
6.2 论文的完善与展望 28
参考文献 29
致谢 30
附录 31
基于图像反馈的智能循迹小车
李思颖
,China
Abstract:Intelligence can the automatic detection and processes the racecourse following the mark car's goal, causes the vehicle mold to move along the racecourse path. We use the camera sensor to collect, use the pattern recognition and so on many kinds of homemade algorithm processing image, the constitution image feed back. After taking out the image operates the extent of the error utilization different PID algorithm to carry on the control of servo and electrical machinery, to achieve our intelligence to follow the mark the goal. The practice demonstrated that this system makes the intelligent vehicle along the racecourse normal operation, the imagery processing is succinct, and this systematic study has created the imagery processing new algorithm including the barrier recognition and black block processing. After the debugging and examination, the system can the highly effective steady operation, the speed be possible to reach as high as 3m/s
Key words:Imagery processing; Intelligent vehicle; Camera; PID algorithm; Intelligence follows the mark
1绪论
1.1研究背景
随着现代电子信息技术的迅速发展,信息的采集和处理对人们而言越发的重要,图像的采集和处理在时下的信息处理中有着非常重要的位置。图像处理采集技术涉及诸多领域,如:在智能车、道路损害检测、航天及遥感、实时图像采集煤矿安全生产监控及电子眼中都用到了图像处理技术。而单片的低成本与灵活性,使得图像采集在单片机上的应用越发的广泛。
单片机产生的日期大约在20世纪70年代末,随后形成了嵌入式系统,进一步朝着MCU扩展。这些技术促进了日常应用在微型计算机上的发展。利用单片机能实现各种简单有效的方法,如:空调的控制,智能手表,计步器,冰箱等家用器件。
单片机性价比高,而且价格容易被人们接受,随着技术的成熟和拓展。越来越多的领域加入到了单片机的阵营,研发出了针对不同领域的不同方法。基于嵌入式的图像处理方法是其中一种。现在基于DSP、matlab、OpenCV、FPGA、ARM及嵌入式等技术的图像处理采集系统是非常多见的。这之中OpenCV技术采用的是C语言,而单片机编程也是用该语言,采用软件opencv VS2012可以更方便的在PC机上对单片机进行调试,并且运用更便捷和简单,无需进行语言间的转换,并且可以对处理的图像进行标记可显示,是一款较适合功能灵活的图像处理软件。使用单片机进行图像处理,能在最低成本下保持智能小车的灵活性与体积,通过对单片机引脚的控制、硬件的设计、调试软件的编译,做出一款图像的采集与处理系统来实现对智能循迹小车的控制和提速。可模拟无人驾驶汽车的情况,为自动驾驶奠定基础。
“恩智浦”杯就是在此背景下,为大学生提供单片机与传感器研究机会的竞赛。比赛采用指定模型,使用不同传感器,搭建循迹系统,沿未知路径进行线路查找,追求高速型与正确性(速度最快并且到达终点前至少3个轮子处于赛道内侧)。本系统在该环境下进行研究与创造,改进车模构造并不断优化,期望达到模型车高速,稳定沿赛道运行的目的。本系统使用的模型如图1-1所示

图1-1车模结构图
下面完整的来介绍比赛的要求:根据传感器分为三个组别(本系统为摄像头组),要求摄像头组采用C车模,利用7.2V可循环利用电池,沿特别设计的赛道自动运行,使用最短的时间完成一圈而且在赛道上稳定运行的队伍赢得胜利。我们需要根据赛道的类型来进行图像处理程序的编写。赛道元素如下
(1)直道:是图像系统识别的基本元素,两边有黑色的边沿。如图1-2

图1-2直道图
(2)曲线弯道:可以呈多种和多段形式的弯道,如(U型弯,S弯,回弯等)如图1-3

图1-3弯道图
(3)十字交叉路口:车模通过路口时沿直线行驶,不能发生左转或右转的情况如图1-4

图1-4十字图
(4)直角弯道:在直角前有10cm的黑块标识,如图1-5

图1-5直角图
(5)障碍:放置于跑道的内侧边沿,图1-6

图1-6障碍图
1.2国内外研究概况和趋势
1970年后,欧洲各国对无人驾驶的汽车展开探索,在如今的工业化领域中得到了实际应用,尤其是美国和德国。将近21世纪,美国研发的智能车达成了自动驾驶的目的[1]。并且速度可达50km/h以上。随后丰田发布了公交车的智能循迹,运用了电磁传感器来控制汽车的转向[2]。而Lux则更近一步完善了自动驾驶的性能,其拥有定位仪及摄影机,能够处理复杂的车况实现自动循迹[3]。
20世纪初,斯坦福大学的车能够在沙漠中稳定控制,跑完了2百多公里的路程。已经能够实际发展至无人车上了,美国的无人车研究处于靠前位置,甚至将技术用于对宇宙的测试,不难看出,无人车的研究已经趋于成熟。德国有了创新性发展,图像反馈系统不止一个,拥有4个,360度的对周围进行检测处理,稳定运行的公里数高达1000多公里。
德国承办了无人车竞赛,在这之中可见众多算法和设计不同的智能车,相同的是,他们都一部分甚至大部分实现了无人车的概念。牛津大学用GPS和摄像头算法来对目前情况和GPS进行对照,而后通过器械通知乘坐于车内的人员。该技术已经使用在Nissan Leaf中
我国的研发较于国外晚。1980年,国防科技大学进行研究,并在1989年取得进展,但仍有问题需要改进。3年后,他们做到了,我国有了自己的智能汽车。THMR-V可以检测多种情况的赛道状况,实现智能查找路线,速度可达22m/s,由清华大学研发。在十年后,即06年,同济大学的旅游车能判断景区环境。给看风景的人群带来方便,并且能够打扫周围的环境卫生。吉林大学的车拥有3D影响,可以智能检测判断路况并进行相应的调整,并且车速能达到15m/s。下图为智能驾驶车辆图

图1-7智能车图
“恩智浦”杯是为了智能车研究而诞生的,竞赛早前由韩国发起。但在近几年里,中国处于智能车竞赛的领先位置,故我们着重介绍国内发展。第一届“恩智浦”杯由清华大学承办[4],开始仅有摄像头和光电组,在第四届竞赛中引入了电磁组。而后赛道由单线变为轨道,每届都提升难度,使得竞赛环境越发靠近现实中的交通情况。该竞赛是国家A类赛事,全国200多所高校积极参与。至2015年恰好是第十届比赛。北京科技大学是其中的佼佼者,汽车模速度最高可达3.5m/s。车模图如1-8

图1-8车模图
1.3研究内容和论文结构安排
研究内容:本文采用恩智浦(NXP)的Kineties单片机,使用K60为主处理器,结合Ov5116模拟摄像头、蓝牙无线传输模块及图像采集上位机构成一个图像处理采集系统。K60的构造;各引脚功能及工作原理;摄像头类型研究;Ov5116与单片机进行数据交互的方法;利用altium designer软件,画出单片机与摄像头之间的连接电路图与电压转换图;采集图像后观察图像的特征并分类,而后对不同的特称进行程序的编写与描述;vs2012 opencv2.4.8在PC中模拟单片机编译环境,实现图像的处理;用液晶显示处理后的图像 ;Keil软件和C编程,并对其程序进行编译;根据液晶显示的处理后图像进行调试,看有无BUG。之后控制电机和舵机进行速度调节和转向
结构安排:
剩余内容已隐藏,请支付后下载全文,论文总字数:47621字
相关图片展示:



该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

