论文总字数:26698字
目 录
1绪论 1
1.1研究背景 1
1.2国内外研究状况 1
1.2.1国外研究状况 1
1.2.2国内研究状况 2
1.3课题主要内容 3
1.4论文结构安排 3
2. 控制系统的整体方案设计 4
2.1总体方案设计 4
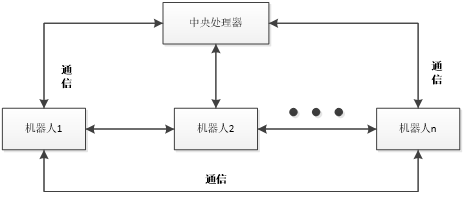
2.2 多机器人系统控制结构 5
2.2.1集中式结构 5
2.2.2分布式结构 5
2.2.3混合式结构 6
2.3 协同算法设计 6
2.3.1 PID控制器 6
3系统硬件设计 7
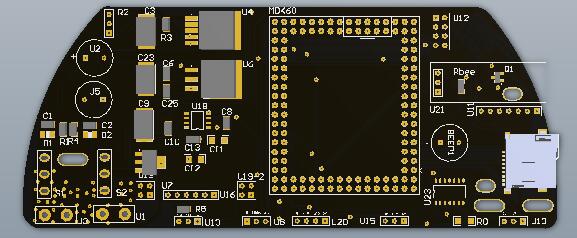
3.1 硬件系统的整体设计 7
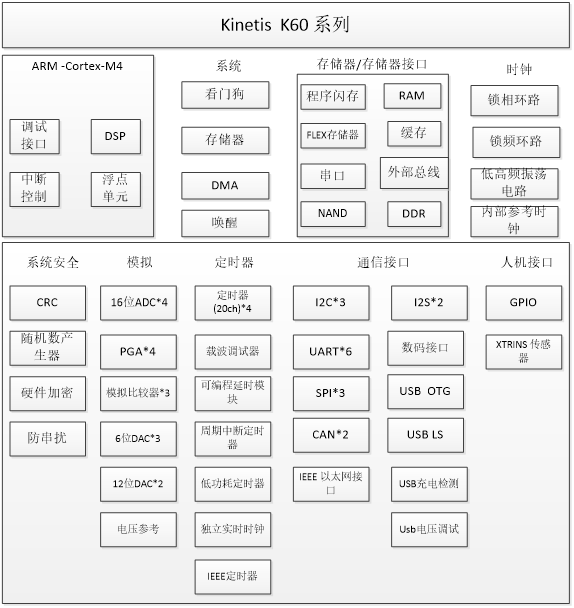
3.2 微处理器模块 8
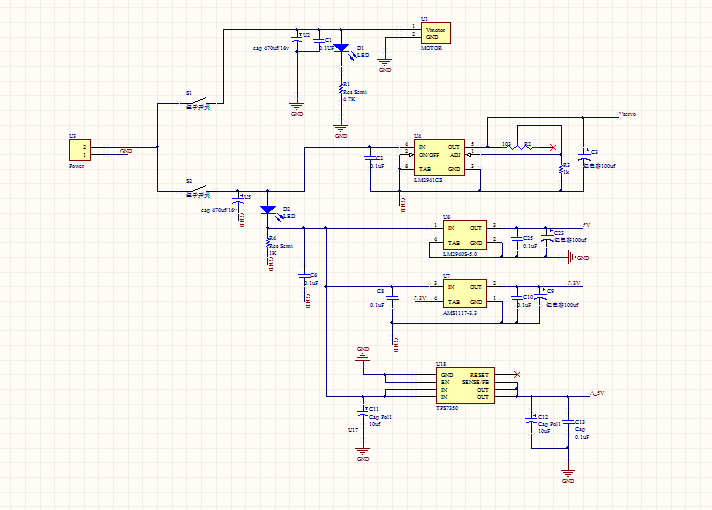
3.3 电源模块 8
3.4路径检测与跟踪模块 9
3.4.1运算放大电路 9
3.4.2超声波测距模块 10
3.5 调试模块 10
3.5.1 OLED显示屏 10
3.5.2 键盘模块 11
3.5.3蓝牙模块 11
3.6 NRF2401通信模块 12
3.7 信息存储模块 13
3.7.1 SD卡存储模块 13
3.7.2 FAT32文件系统应用 14
3.8 电机驱动模块 15
3.9 测速反馈模块 15
4系软件设计 16
4.1软件系统整体设计 16
4.2 开发环境介绍 17
4.3数据的通信协议 18
4.4 协同控制的传感器数据处理与融合 18
4.4.1数据滤波 18
4.4.2 数据归一化算法 18
4.4.3 matlab的数据拟合应用 19
4.4.4 传感器数据融合技术 19
5系统调试与分析 20
5.1系统整体测试 20
5.2超声波数据测试 21
5.3 滤波算法的测试 21
5.4机器人运行距离控制测试 22
5.5速度协同测试 22
6结论与展望 23
6.1 工作总结 23
6.2设计不足和研究展望 23
参考文献 24
致谢 26
附录 27
多机器人协同控制
单明
,China
Abstract:At present, the multi robot cooperative control technology has achieved certain development. Robots are more and more widely used in daily life.Multi robot cooperative control has become a hot research topic.The background of this research is based on the National Undergraduate smart car competition sponsored by NXP.But the background of the domestic and foreign collaborative study is complex, and collaborative control system structure depends on the different hardware platform, the real-time operating system is not high, they can not applied to the the design of mine.According to the background of the competition, we make the two vehicles which can track the track independently with multi sensor data fusion technology , and combined with the use of the data fitting function in MATLAB. We also use the Improved PID algorithm. we have realized the cooperative control of two robots at the speed.The system has good practice and robustness.
Key words:robot;Cooperative Contraol;PID algorithm ;Data Fusion.
1绪论
1.1研究背景
随着科技水平的不断提高,机器人逐渐进入人们的日常生活当中并且运用越来越广泛。但需要做到这一步目前依旧承受着很多压力,特别是工业生产中对机械化和智能化的要求越发的多。1970年,对人工智能的协调控制和通信交互方向的研究被提出和探讨。1989年左右,关于多机器人协调控制才刚刚起步,但到了九十年代则开始了迅速的发展,同时带动了相关领域研究的进一步发展。机器人通过外部传感器采集附近的环境,内部传感器来感知本身的运行状态。通过任务需求和路径规划移动到达目标。智能性是体现机器人水平的重要标准,机器人可以自主根据其搭载的传感器的探测周围的环境及时调整自身的动作和行为来快速适应周围的环境变化,来体现出智能性。单一的机器人会因为自身的资源有限,无法完成面临的任务,所以需要多个机器人以一定的规则来共同完成。有些任务一个机器人并不能完成,需要多个智能系统进行合作,高效的完成复杂并且高难度的任务。多机器人系统有许多优势。例如:能够通过协作完成复杂而且危险的任务,而单一的机器人只能完成简单的任务,这样就提高了工作的效率,同时各机器人能在功能上互补,具有经济可靠、响应快速等优点。多机器人的运用需求越来越多,在众多方面有着广阔的应用前景:
(1)恶劣环境:多机器人能够在人类无法工作的地方,完成复杂而且危险的工作,如火山、野外、深海等高危环境;
(2)航空领域:探测机器人进行星探测,寻找新型能源,搬运矿物等;
(3)军事方面:由大量的机器人组成一定编队执行巡逻、侦察、排雷、追踪等许多任务,可减少兵的人力资源及人员伤亡;
(4)民用方面:清洁机器人可用来打扫地面,现在已被广泛使用,还有机器人足球用来观赏,以及机器人玩具等;
(5)灾后救援:自然灾害发生后,机械可代替人工完成较为危险的任务。并能凭借高效的处理能力精准的进入危险区域,找到受害的人群。
(6)工业生产:工业中大量使用机械来提高生产能力,高效和安全的代替了人力资源,越来越多的领域开始接触多机器人和使用他们;
(7)医疗领域;微型智能系统进入血管检查疾病,修复破损组织等。
1.2国内外研究状况
1.2.1国外研究状况
截止目前,国内外诸多研究人员都对多机器人协同控制进行了大量的研究,并在理论和实践中都获得了许多的成果,国外的研究相对国内较早,领先于国内的发展水平。对于协同控制的体系架构的研究,许多学者都提出了许多有价值的结构形式及分析。Parker[1]提出了一种alliance分布式结构控制系统,编队当中各个机器人执行由中控制器分解得到的子任务,设计了较好的选择机制,容错率很高。Chaimowicz[2]等提出了另一种协同控制结构系统,该系统中有领导机器人和跟随机器人,但是它们之间的主从关系是可以互相转换的,这样就提高系统的鲁棒性和容错率,在领导者出现故障时,仍可以定稳定的运行。Simmons[3]等提出了一种多机器人的分层协同框架系统,把协同方式分成不78同抽象层次,应用在太空探测车的研究当中。乔治亚洲理工学院的研究工作者利用UGVDemII项目对队形控制问题进行了研究,并且使用基于行为法则的无人车的编队控制系统。Drexel大学的机器人智能感知与机电一体化实验室,对于移动机器人的非完整性约束队形之间的转换及避障等问题进行了相关研究。南加州大学研制的TheNerHerd系统设计二十个机器人跟随、聚集、分散及回家等行为,通过无线的局部通信,利用队形控制依据邻居定位法进行实现。美国麻省理工大学J.Mcrkin等研究了多机器人协同控制中,大量行为的设计、算法复杂度以及算法性能的评估和预测。LawtonSUAV[4] 采用了基于行为的方法对编队飞行问题进行相关的研究,并分析了编队系统的收敛性与误差的影响。EDSCosta[5]等提出一种提前估计研究对象的特点的搬运物体协作框架设计,通过实验侦查飞行器发现目标与搬运机器人进行合作,验证了该想法的实用性.T.Dierks和S.Jagannlar[6]由反演法设计了神经网络观测系统用来领航-跟随的队形控制的一种反馈控制方式。PandanC等提出了一种自我学习的博弈框架,克服机器人协作过程当中节点不合作的问题,采用一种效用函数能够控制自我的传输效率来控制单独的自主节点。H.Mehrjerdi等采用基于模糊控制的集中式的协调控制方法和根轨迹踪算法,使机器人按照预先定义的轨迹编队行进,但模糊规则的制定则会受到运动学等多种因素的限制。G.BeniPU提出了一种群智能结构,用大量只拥有低级处理的能力及运动能力的机器人构成整个群体,模拟自然界当中昆虫的自然表现,机器人群的运动状态表现出了群体的智能特点。德国卡尔斯鲁厄大学的研究人员提出了I-Swarm项目,利用微型机器人系统对仿生学当中自动组织、自主适应的微小生物进行研究。美国休斯研究实验室的D.Payton等观察了昆虫之间通过隐式通信的方式,交互信息、相互协作,开展了虚拟生物信息的生物群体的智能项目。
1.2.2国内研究状况
我们国家对这类问题的研究晚于欧洲,但依旧在进步中。中国科学院沈阳自动化研究所王越超[7]等,开发了一种智能多机器人系统MRCAS能够完成编队保持、队列变换和躲避障碍,同时还可以利用网络控制多机器人,实现机器人的远程操作。上海交通大学席裕庚[21]等开发了一套实用多功能的多机器人平台系统,利用Pioneer2先锋机器人来进行编队控制、协同运动及定位导航等方面获得了一些成果。中科院研究所谭民[8]等研究与分析了多机器人系统结构,协同运动的方法等进行了系统的研究,并利用控制理论在复杂的环境背景下对编队控制进行了稳定性的分析。王磊[9]等提出经费和报酬设计最优目标函数方法,主要考量环境信息、历史状态、信誉等方面的进行综合评价,运用到足球机器人具有良好的表现。
1.3课题主要内容
剩余内容已隐藏,请支付后下载全文,论文总字数:26698字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

