论文总字数:20602字
目 录
1 航天器及姿态控制系统介绍1
1.1 航天器背景1
1.2 航天器姿态控制系统的组成1
2 航天器姿态控制存在的问题4
2.1 转动惯量的参数不确定4
2.2 干扰力矩的控制5
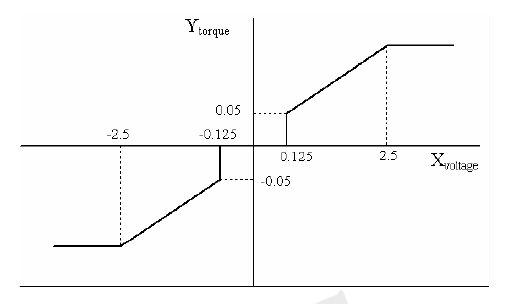
2.3 饱和及死区输入非线性5
3 国内外挠性航天器姿态控制方法研究现状6
4  控制方法介绍7
控制方法介绍7
4.1  概述7
概述7
4.2 的应用方向实例8
4.3 线性矩阵不等式及相关用语9
5 执行机构部分失效的挠性航天器的控制11
5.1 问题描述11
5.2 控制器设计和求解12
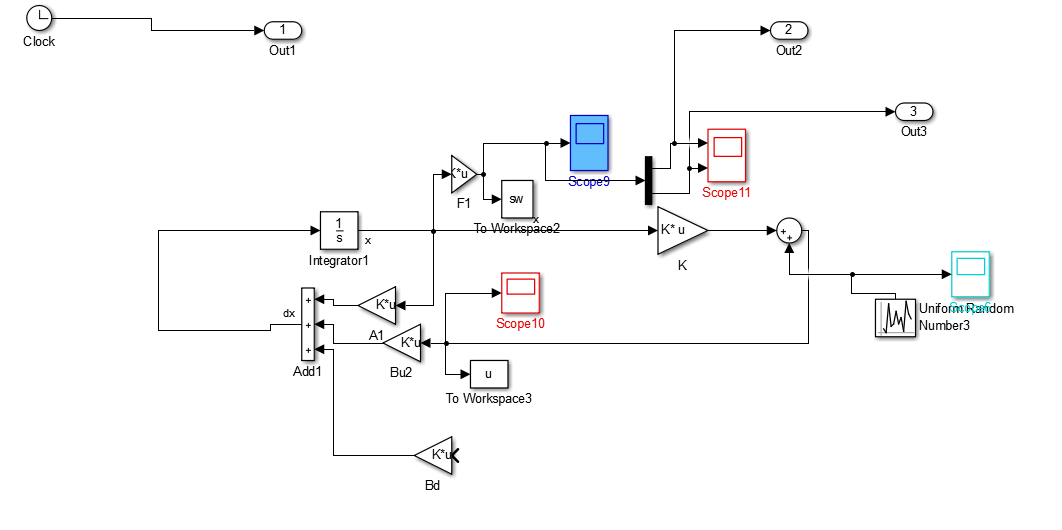
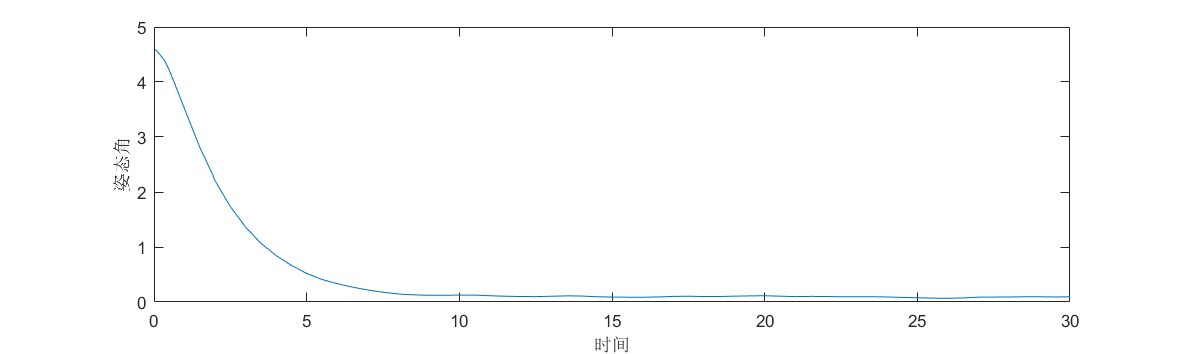
5.3 仿真及实验15
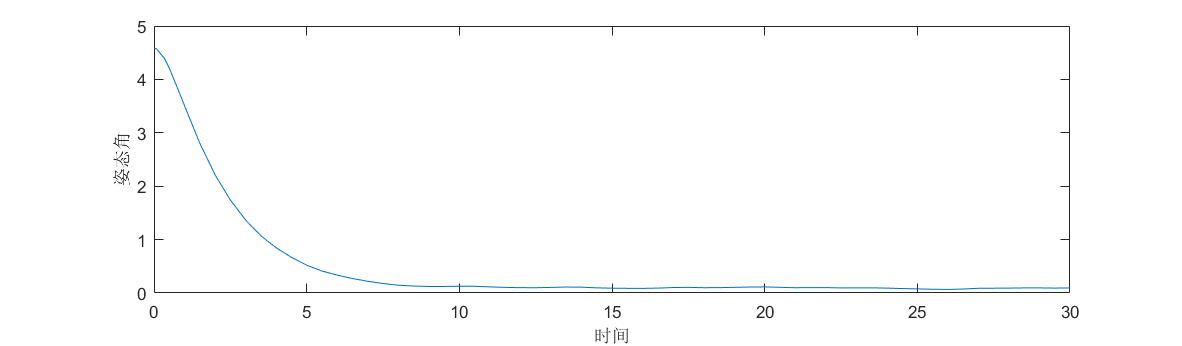
5.3.1 不同时滞上限时姿态响应图16
5.3.2 取不同参数时姿态响应图20
5.3.2 不同干扰时姿态响应图20
6 讨论22
6.1 时滞上限对航天器姿态控制的影响22
6.2 不同对系统性能的影响23
6.3 不同干扰信号对航天器姿态控制的影响23
7 结论23
参考文献23
附录25
致谢28
基于鲁棒的挠性航天器姿态控制研究
韩雨钢
,China
Abstract:This paper constitutes an analysis of flexible spacecraft, combined with robust control, the use of flexible spacecraft derived matrix expression schur complement lemma and the LMI, and executes a part of the spacecraft is part of the failure. And summarized the classification of flexible spacecraft attitude and attitude control system components, divided into passive control, semi-active control and active control of three categories. Later he summarized several methods of modern control of spacecraft, including the control, fuzzy control, variable structure control and adaptive control, and analyze the advantages and disadvantages of these types of control mode. After that, we used MATLAB software simulink simulation module of the system is divided into two directions, namely delay time-sensitive measurements, and observation of the stability of the system under different interference targeting and attitude angle of observation posture angular velocity, drawn comparison chart of the two parts, and ultimately concluded that the system for time-sensitive and time-delay system to respond to different interference still maintain a certain stability.
Keywords:robust control ;Flexible Spacecraft ;Attitude angle
1 航天器及姿态控制系统介绍
1.1航天器背景
伴随着人类前进的步伐,科学和金融的持续发展,人们提高了前往外太空乃至整个宇宙的速度,使得航空航天方向迅速前进。自从第一个人造地球卫星于50年代被前苏联发射以来,我们发射了数以千计的航天器去探索外太空,这不但表现了人们了解自然,改造自然的勇气和意志,而且很大提升了社会的发展水平,获得了极大的金融功效以及长远的世界影响。也可以说,一个国家需要依靠航天器的发展来证明其在世界上的地位。
作为一个杂乱的大型系统,航天器系统在涵盖了物理,化学,结构学等所有领域几乎都有所涉及。而其中有许多的分系统,这些分系统包括热能控制系统[1],姿态控制系统,构造系统,电力系统,交通控制系统,测控系统及其他的特殊系统。航天器系统由许多复杂的低级系统组成,这其中最最重要的部分就是航天器的姿态控制系统,能否很好地设计航天器姿态控制系统这对航天器能否正常运行十分关键,与此同时,设计的优良也会对航天器正常运行其有效载荷产生重大影响[2]。
如今,随着航天事业的迅猛发展,航天器各个部分将会被要求完成各种复杂的任务,也就是说对航天器中的附加部分的需求也更加复杂,例如对航天器供电部分的要求即是能够提供足够的电能,而航天器的接受装置则要求能够识别出细小和低频的信号,而对于空间机械手则要求能伸的更远以及能做各种更加灵活的动作,这对航天器附加部分提出了新的要求,即更加的大型化。与此同时,为了增加运载部分的效率以及减少发射的成本,航天器的附加部分的制造就不能使用具有较高刚度的材料,于是飞行器中就不能使用一些非柔性结构,于是,诞生了一种新型的空间结构,即是主体部分由刚性材料组成而附加部分由柔性材料组成的挠性航天器[3-5]。对于这种独特的挠性结构,我们常常使用各种偏微分方程等数理方程来对其状态进行描述,该系统具有极大的自由度,我们对这种系统的研究一直处理低迷的状态。我们习惯使用状态空间来对一个系统进行研究,却发现这对分布参数系统来说研究是很难进行的,对应不同时间,系统具有不同的状态,这就对使用解析公式来分析造成了巨大的难度,因此如何合理地去控制他相较于通过微分方程描述的集中参数系统更加地冗杂,我们经常使用维数接近无限的system control理论与方法,functional analysis,分布参数系统的robust控制理论和方法,数值approximately等等各种方法以及各种随时改变的控制方法对他进行分析。除此之外,挠性航天器的正常运行中,仍然会有大量外界因素产生的力矩会对其产生影响,例如气体的动力力矩,由重力产生的梯度力矩,因受到外太空障碍物碰撞从而产生的力矩,太阳光的辐射产生的压力进而导致产生力矩,磁力矩等等;即使在正常情况下,仍会有变动的航天器剩余燃料这种不可控因素,为了对处于低轨道运行状态的航天器进行监视,航天器上安装了大型的天线系统,该系统最终使得压抑的扰动及难以确定参数的模型不断困扰着挠性航天器的动力学和控制过程。
1.2航天器姿态控制系统的组成
对于航天器来说,姿态控制系统作为其重要的构成部分,关系着在轨航天器对于所在轨道能否准确无误地进行跟踪,对于航天器的具体定义,指的是能在距离地表150km外的空间顺利运行并能自主地应付突发情况的飞行器,其系统框图如图1.1
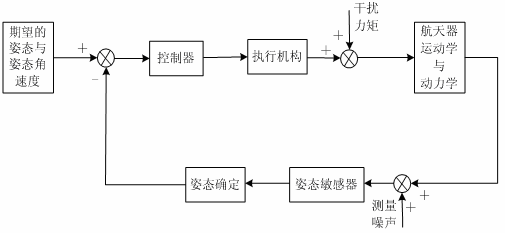
图1.1 航天器姿态控制系统结构框图
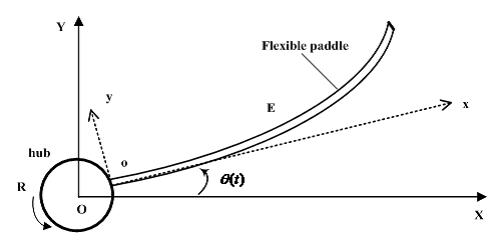
航天器的姿态控制各部分结构如图1.2
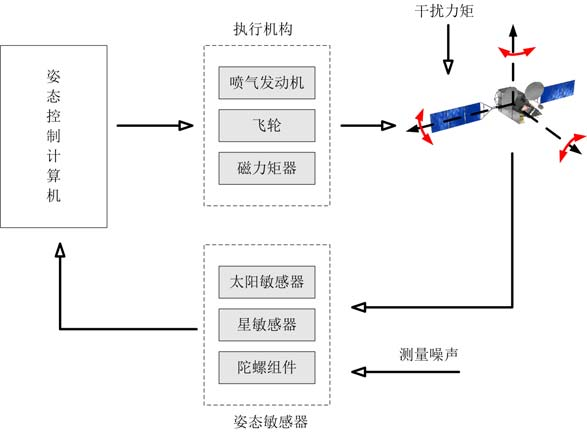
图1.2 航天器结构示意图
卫星姿态敏感器比较见表1.1,可按不同的基准方法分为以下五类:
- 红外地平仪,红外圆锥扫描地球敏感器等通过地球进行校准;
- 太阳敏感器,星敏感器等以天体进行校准;
- 陀螺等通过惯性空间校准;
- 射频敏感器等使用地面站位作为校准;
- 剩余部分,如磁强计对应地磁场,陆标敏感器对应地貌。
姿态敏感器包含测量变换器和信号处理线路,按不同方式的测量变换器可分为以下四类:
- 太阳敏感器,红外地平仪。星敏感器,地球反照敏感器等使用光学敏感器
- 陀螺使用惯性敏感器,
- 射频敏感器使用无线电敏感器
- 其他,如磁强计
表1.1 各类敏感器介绍
类型 | 优点 | 缺点 | 精度(单位/度) |
地球敏感器 | 信号强,轮廓分明,分析方便,特别适合对地飞行的近地轨道 | 一般需要活动扫描机构,易受太阳等干扰 | 0.03~0.05 |
太阳敏感器 | 信号源强、视场大、轮廓清晰、功耗低、质量轻 | 阴影区无有效信号输出 | 0.01~0.5 |
星敏感器 | 精度高,自主性强,无活动部件,不受轨道影响 | 结构与系统复杂,成本高,视场一般较小,对环境要求高,要防止太阳等杂光干扰 | 1~20 |
磁强计 | 成本低,功耗低,对低轨道卫星灵敏度高 | 受轨道高度影响大,容易受星上电磁干扰 | 0.3~3 |
陀螺 | 精度高且动态响应快,不受轨道影响 | 功耗一般较大,输出具有漂移,对环境要求较高。另外,机械陀螺具有高速旋转部件,光纤陀螺易受磁,温度影响 | 随机漂移:0.0001~0.1 |
我们接下来对近代发射的航天器上的配置进行汇总,如表1.2。
表1.2 近代发射航天器参数
卫星 | 发射时间/年 | 姿态精度( | 姿态稳定( | 姿态测量系统配置 |
SPOT-1/2/3 | 1986/1990/1993 | 控制:0.15度 |
剩余内容已隐藏,请支付后下载全文,论文总字数:20602字 相关图片展示:
您需要先支付 80元 才能查看全部内容!立即支付
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找; 您可能感兴趣的文章
|
 )
) )
)