论文总字数:17651字
目 录
1 引言 5
1.1 本课题的研究目的及意义 5
1.2本课题的国内外研究现状 5
1.3 本课题的研究内容 6
2系统硬件设计 6
2.1 基本原理 7
2.1.1增量式旋转编码器的工作原理 7
2.1.2 PWM基本原理 9
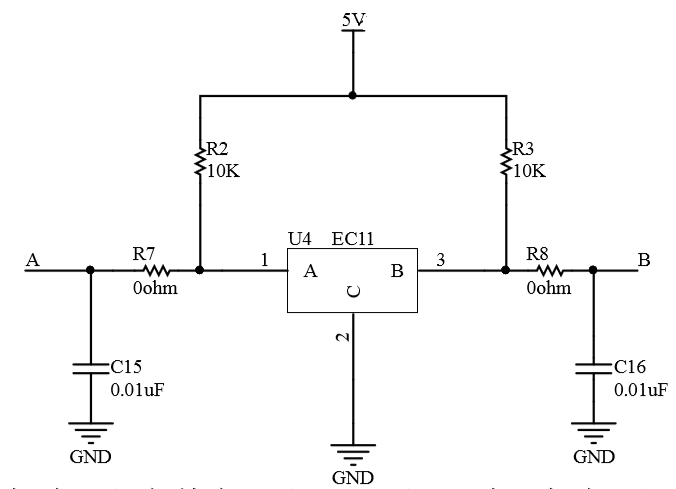
2.2编码盘电路模块 11
2.2.1 EC11旋转编码器性能介绍 11
2.2.2 EC11旋转编码器原理分析 12
2.2.3编码盘基本电路 12
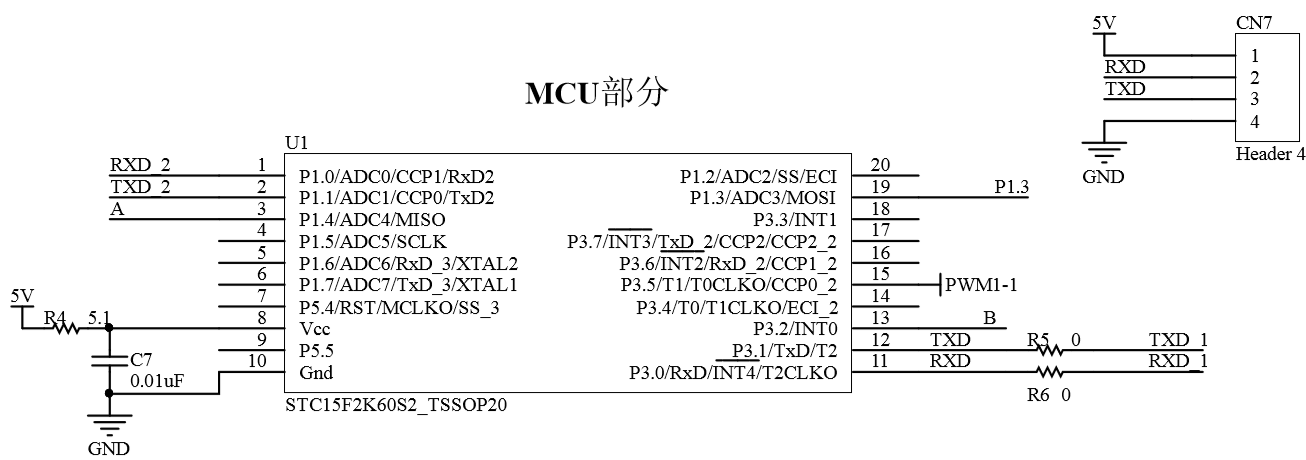
2.3 单片机主控模块 13
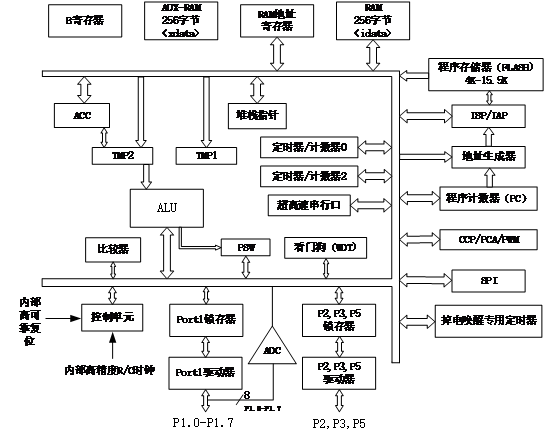
2.3.1 STC15F2K60S2单片机性能介绍 14
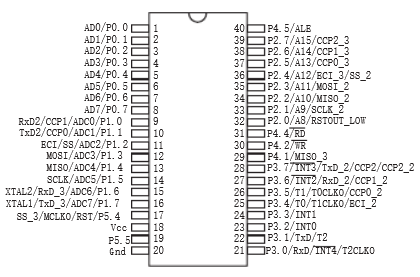
2.3.2 STC15F2K60S2单片机引脚介绍 14
2.3.3 单片机主控模块功能 16
2.4 PWM Buffer模块 17
2.4.1 SN54ACT244缓冲器功能原理分析 17
2.4.3 反相器电路 18
2.4.4 PWM Buffer基本电路 19
2.5 PWM缓冲电路 20
2.6 LED开关控制电路部分 20
2.7电源电路模块 22
2.7.1 LM2678电压变换器性能介绍 22
2.7.2 LM2678电压变换器引脚介绍 22
2.7.3 电源电路模块的工作模式 22
3、软件程序 23
3.1 主程序 23
3.2 编码盘与MCU连接模块程序流程 24
3.3 PWW缓冲模块 24
4、系统的硬件制作与调试 25
5、总结 29
参考文献 29
致谢 31
增量式LED PWM调光控制系统设计
陆烽
, Nanjing, China
Abstract: In today's society, the rapid development of China's economy, LED lights in the city more and more applications, on the LED light dimming function is also very important. In order to realize the diversity of LED light, this will be how to achieve the LED lamp dimming is discussed, this system mainly uses PWM principle, using incremental rotary encoder, MCU module, PWM buffer module parts with each other to design a PWM light control board in hardware, and software programming to achieve PWM control LED lamp control function.
Key words: LED lamp, incremental encoder, pulse width modulation PWM, dimming, buffer module, software programming
1 引言
1.1 本课题的研究目的及意义
相比于传统的光源,LED是一种崭新的半导体固态光源,它是颗粒形状的发光元件,不需要使用钨丝和灯管。LED光源具有环保、节能、耐久、安全等多种优势,在当前提倡建设节能环保型社会的趋势下理所当然地成为照明领域的风向标。
随着中国经济及科技的不断发展,LED照明越来越多地应用到各大城市中,为城市的市容与发展带来了巨大的推进作用。在当今时代的照明领域中LED的投入应用毫无异议是令人兴奋的,它将带领整个照明市场的结构改变,很快就能实现广泛普及。LED的技术本身并不是一个很新的东西,在多年以前, LED便开始用来作为作仪器的指示灯。随着技术的发展,在性能上LED的芯片和材料都有新的改进,从而也推动了LED更加广泛的应用。
伴随着LED应用市场的持续迅速发展,应用范围的持续扩大也导致了对产品要求的不断提高,关于LED亮度的调节功能在LED终端产品中也就显得非常必要,也是目前各种LED产品在设计生产中必须注意的环节。
如今,LED照明已俨然在其相关技术领域中占据主流的地位。此项技术正日渐成熟,政府各种LED照明标准和政策的出台就是其重要的代表标志。对LED照明效率的严格要求已经持续实行了很长时间,今后也会继续坚持,不断提高。最近,关于LED照明设计的工作迎来了更大的挑战,该项技术要同时满足两个要求:首先实现调光控制的功能,必须满足通过控制白炽灯的调光器这个前提,另外也要实现高功率因数性能,当前对于LED亮度的调节,主要分为模拟调光和PWM调光。而调光是照明系统中格外常见也是很重要很基本的功能。对于白炽灯来说,它可以以低成本轻易实现。但是对LED灯进行调光的话却有着一定难度,站在用户的角度来看,在使用LED照明时,他们不愿失去调光控制原有的优势。本课题将对基于PWM的增量式LED调光系统的相关情况进行介绍。
1.2本课题的国内外研究现状
从技术层次上分类,LED调光控制器可分为半数字式、全数字式和模拟式三类。全数字调光器技术是最先进的,目前在世界上以调光一致性优越、调光范围大、调光精度高、调光曲线多样,智能化程度高等众多优点闻名调光界。而在调光方式上,主流上有PWM和CCR两种,PWM和CCR各有各的优缺点。两者相比而言,PWM的应用更为宽广,调光范围也更加的广泛,能够做到光输出的1%以下,而且无论LED的工作状态是在最大电流、额定电流,还是在零电流,都可以有效地避免色漂现象。由于PWM调光拥有快速开关通断的能力,所以它需要更复杂昂贵的电子驱动设备来产生足够高频率的电流脉冲,从而消除人眼可见的闪烁。本文将采用PWM脉宽调制原理,利用增量式编码器和软件编程改变方波的占空比,调整通电时间,从而实现LED的亮度调节。
1.3 本课题的研究内容
本课题所要实现的是通过PWM调节脉宽方波的占空比,改变LED灯在一个周期内的导通时间,从而调整平均电流,达到LED灯的亮暗调整。为实现该功能,本文的研究思路如下:
(1)该系统是通过编码盘手动调节LED灯的亮暗,因此编码盘的选择尤为重要,本系统将使用EC11旋转式编码盘,其工作原理与操作方式均适合本次设计。
(2)编码盘发出的信号将经过MCU的PWM功能处理,编码盘信号的不同也将影响MCU输出信号的不同,但是MCU部分中的单片机不能直接作为直接驱动LED的元件,为了实现过渡,本文还将引入反相器。
(3)本次设计中,LED灯有很多,要实现多个控制,决定使用缓冲器,从而达到由一个信号变为多个信号控制LED灯。
(4)该系统中,各个模块的运行都需依靠电源,因此电源的稳定与质量尤为重要,本设计有必要选择一个可靠的电源模块。
2系统硬件设计
整个LED调光系统由MCU部分、电源电路模块、编码盘电路模块、PWM缓冲电路模块、LED开关控制电路模块几部分组成。下图1为系统总体电路图。
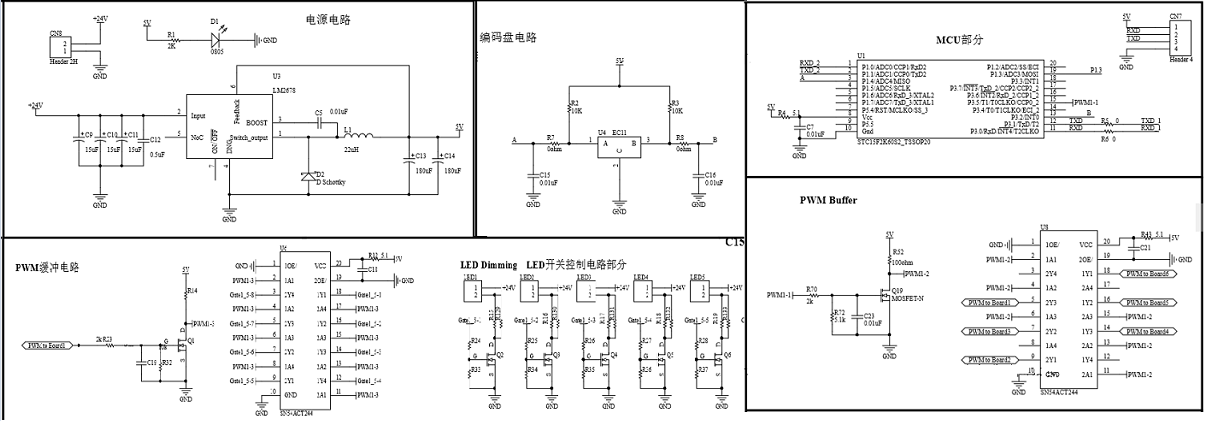
图1 系统总体电路图
该系统主要功能实现为:
(1)给电路上电,旋转开关,反转LED灯变暗,正转则变亮。
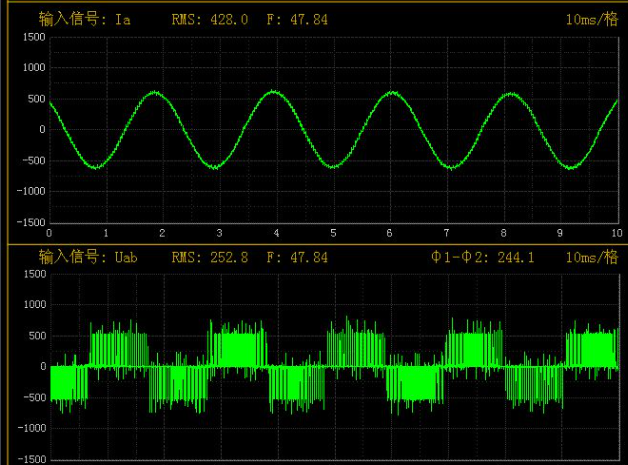
(2)在增量式旋转编码器上旋转旋钮,发出A、B两个方波信号。
(3)旋钮正转,A信号超前;反转,B信号超前。
(3)单片机根据AB信号的相位超前滞后关系,正转则单片机输出方波占空比增加,反转占空比减少,占空比越大,LED灯导通时间越长,灯越亮。
下图2为系统总体框图:
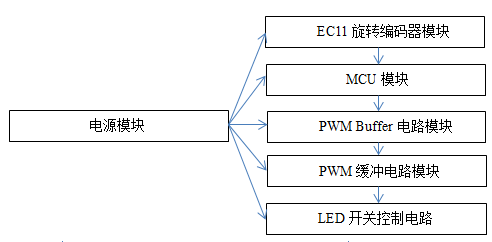
图2 系统总体框图
2.1 基本原理
2.1.1增量式旋转编码器的工作原理
据编码器的工作原理分类,当前市场上的增量式旋转编码器可以分为两种:光电式和电磁式。它是一种将因旋转而产生的角度位移量转化成周期性脉冲电信号的传感器,每旋转一圈,它就会产生固定数量的A脉冲信号和B脉冲信号,两者脉冲信号相位相差90度,若顺时针旋转则A脉冲超前B脉冲(如图3),逆时针旋转则相反(见图4)。另外,该旋转编码器还有一个零信号脉冲输出。随着编码器按钮的旋转,编码器内部也不断输出相应的工NA、工NB和工NZ信号脉冲,这样可以做到多圈无限累加与测量。

图3 顺时针旋转时的输出波形图

图4 逆时针旋转时的输出波形图
增量式旋转编码器改变其角度码盘的相位和时序关系是通过内部两个光敏接受管实现的[7],若正方向旋转,则产生的角度位移量增加;若反方向旋转,则产生的角度位移量减少。在接合数字电路尤其是单片机后,与绝对式旋转编码器相比,增量式旋转编码器在角度测量和角速度测量方面上显得更廉价,更简易。图5为旋转编码器的实物图。

图5 旋转编码器实物图
A,B两个点对应的是两个光敏接受管,两点之间的间距是 S2 ,角度码盘的光栅之间的间距分别是S0和S1。
当角度码盘以某种均匀的速度旋转时,那样就可知道输出波形图中的S0:S1:S2的比值和实际图中的S0:S1:S2三个数据的比较值是相同的;同样的道理,角度码盘以其他的均匀速度旋转时,输出的波形图中的三个数据S0:S1:S2比较值与实际图的三个数据的比较值仍然是相同的。另外一种情况就是,如果角度码盘开始做变速的运动,那么就可以把它看成是好几个运动周期的组合,在这种情况下每个运动周期中的输出波形图中S0:S1:S2三个数据的比较值与实际图的S0:S1:S2数据的比值就仍然是相同的。
下图是通过输出波形图(图6),可知每个运动周期的时序。

图6 旋转式编码器运动周期时序图
现在我们把当前的A、B两个输出的值数据保存一下,再与下一个A,B输出值来做对比,这样就能够很容易的的得到角度码盘的运动方向,当光栅格S0=S1时,这也就是说S0、S1的弧度夹角相同,而且S2=S0*1/2,这样就可以获得这次角度码盘运动的位移角度是S0弧度夹角的1/2,再除以所消耗的时间,这样就可以获得这次角度码盘运动的位移角速度。
S0=S1时,且S2=S0*1/2时,1/4个运动周期就能够获得运动方向位和位移的角度;单假设S0不等于S1,S2也不等于S0的1/2,那么这个时候就需要1个运动周期才能够获得到运动方向位和位移的角度。
剩余内容已隐藏,请支付后下载全文,论文总字数:17651字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

