论文总字数:21506字
目 录
摘要 i
Abstract ii
1 引言 1
2 智能小车技术介绍 1
2.1 智能小车研究的现状 1
2.2 智能小车的类型及其原理 2
3 硬件设计 3
3.1 整体设计方案 3
3.2路径识别模块 4
3.2.1路径识别原理 4
3.2.2 电路设计 4
3.2.3 电路硬件设计 6
3.3 单片机模块 7
3.4 驱动控制模块 9
3.4.1驱动模块 9
3.4.2芯片L293D介绍 9
3.4.3 PWM调速原理介绍 11
3.5 电源模块 12
4 系统软件设计 12
4.1 主程序模块 12
4.2 中断服务程序 13
4.3 控制程序设计 14
5 系统调试与检测 16
5.1 硬件调试 16
5.2软件调试 17
6 结论 18
参考文献 19
致谢 20
附录 21
电磁感应式智能小车电机驱动控制器的设计
尤兴嘉
,China
Abstract:Intelligent vehicle with STC89C52 single chip microcomputer as the core, according to the analog voltage signal collected by electromagnetic induction type of path recognition module, witch will be transform by AD module,adjust output PWM wave duty cycle,using software programming,so as the four DC-motor speed is not the same,to control the car running direction . This system uses the C language as the MCU and the drive controller procedures,the structure of witch is calling several subroutine.This diploma project focuses on flexible control of four-wheel car motor.
Key words:STC 89C52;electromagnetic induction type;PWM;DC-motor
1 引言
智能车是集路面信息检测、多种类型导航、自动控制原理和自动行驶等功能于一身的综合系统,运用了包括传感器技术、导航技术、智能控制,计算机技术等多种知识。智能车在安全交通,勘探测量,外星地质测量等各方面都有应用,例如人类探索月球及火星,都是先利用智能车探索外星地表采集数据。由此可见,智能车能够在人类无法适应的环境中代替人类工作。智能车强大的实用性促使各国加大力度开发智能车项目,取得了很多突破性的进展。现代社会已经有许多智能车应用于生活实际,人类距离一个智能化的交通工具并不遥远。智能车对电机控制的要求非常高,控制频率要能完全适应路况变化,突发情况等,这一特性也使得研究过程中智能车的驱动控制电路模块越来越精准有效。随着近年来智能控制理论的日渐成熟,诸如模糊控制,神经网络控制等方法变得完善,智能车应用于生活中已经不再遥不可及[8]。智能小车作为智能车的研发简易版,可以测试许多新颖技术,是智能车技术研究的前端,因为其实用性和趣味性深受广大大学生的喜爱,也是电子竞赛的主流之一。在国内,最普及的如飞思卡尔智能车比赛,在如今的大学生中非常受欢迎和重视。
2 智能小车技术介绍
2.1 智能小车研究的现状
随着社会的不断进步,机器人技术也在不断提高,机器人可以完成许多人类自身难以适应的条件下的工作。智能车作为机器人技术中一项重要的组成部分,实现智能行驶,自主处理等功能,正在逐渐地走向成熟。
现在各国对于智能车的研究日益重视。从科技角度来说,智能汽车必然是未来汽车工业的一大分类,它可以为人类提供更加高效和便利的交通更方式。从商业角度来说,相比于传统汽车,显然智能汽车的竞争力会更加强大,可见的巨大利润空间也促使各国企业抓紧智能汽车的研究。从军事以及地质勘探来看,智能车能够在人类无法适应的环境中工作,例如我国嫦娥计划中运用到的无人探测月球的工作,在月球表面采集土壤样品,就是由智能车完成。
智能车涉及的方面小到生活交通,大到太空探索,应用非常广泛。实际上智能车的研究从未停止过,在计算机性能日益强大体积却逐渐缩小的今天,智能车课题才会被当做一个独立的课题,智能车可以做到完全的自主自动。国外研究相对要领先国内,英国名为ULTra的智能车已经应用于实际生活,实现自动接送客人。国内各高校也有相应成果,早在2012年,由国防科技大学研究的红旗HQ3已经实现无人驾驶行驶286公里,代表我国智能车的研究已进入世界先进水平[19]。
智能小车的研究大致经历过三个阶段。第一阶段是固定的编程再现形式,即智能小车按照事先编好的程序行驶,无需任何传感器,不能对外部条件做出反应。第二阶段是离线编程加传感器的形式,它可以借助传感器简单的感知周围环境并做出调整,调节方向,速度等物理量,是一个闭环反馈的系统。第三阶段是智能化的形式。这种类型的智能车具备有大规模的数据采集能力和多种类物理量综合处理的能力。它能够准确感知周围环境,借用自身数据库,独立自主地完成决策,表现出来的就是高度的组织能力和处理能力。目前第三阶段的研究还不够成熟,有许多核心问题诸如多线程综合处理等技术还不能实现。
智能小车的研究是为了实现高度智慧的智能汽车技术,在研究智能小车的过程中运用到的设计控制方案、单片机、软件仿真等技术能够帮助我们更快速的找到合适于未来的智能车技术。
2.2 智能小车的类型及其原理
按照循迹方式划分,智能小车大致是电磁感应式,光电式,和视觉式等。
电磁感应式,也是本设计会用到的方式。按照事先设定好的路线铺设导线,在导线中通入稳定的交流电流,由电磁效应可以知道在导线周围将产生稳定的磁场。在智能小车的前端装有两个对称的电感,在小车行驶的过程中,电感中会产生相应的感应电压,通过两个电信号的差两来确定小车偏离导线中心的位置,经由单片机处理反馈控制电机动作。整个系统是一个连续的闭环实时反馈系统,动作频率直接影响小车的行驶效果。
光电式是一类总称,红外线和激光都可以包括在内。搭载光电式传感器的智能小车通过对周围定位坐标的扫描,反馈给系统一系列的坐标信息,由控制系统判断并给出相应的动作信号。相比于电磁感应式,这种小车有点在于容易控制、原理易懂、传感器输出可直接接入单片机,同时缺点在于,它的灵敏度不如电磁式,而且需要的传感器数量也相对较多。这类的智能小车行驶路径有事先放置好的坐标决定,有很高的智能化行为和使用价值。
视觉引导式是相比前两种较为高等和成熟的类种。这种智能小车会搭载CCD照相机,多种传感器和数据处理模块。在行驶过程中收集周围的地理信号和图片信息,然后通过数据处理模块对图像数据进行分析,生成可以由机器识别的信息,通过CPU处理,发出动作信号,确定下一步的动作,小车的方向、速度等参数都是由小车根据自身判断自主设定。这种小车优点在于灵活性,不局限于事先设定的坐标,有更为宽广的适应性,也是最多应用于现代工业 。
此外还有许多其他特殊类型的智能小车例如声纳传感等,相对于上面三种,装有特殊传感器的小车应用场合多在科研勘探领域,在未来生活中应用很少会应用到[8]。
3 硬件设计
3.1 整体设计方案
本设计成品是一个能沿着事先铺设好的导线,自动行驶、转弯和停止的智能小车。在小车前端安装有对称的电感用以收集电磁信号,经过简单的谐振选频和放大电路处理后,送入单片机系统中。本设计采用STC89C52单片机系统处理整个系统的逻辑运动。单片机对采集信号处理过后给出相应的动作信号,控制驱动电路的电平信号,从而能控制直流电机的转停和速度,使得小车能够稳定正确的循迹行驶。整个系统是一个动态的闭环系统,通过高频的反馈保证小车能不断调控四路电机,避免因为惯性小车脱离轨道,相比于两路来说更加灵活稳定。
硬件设计部分,总共系统会分为四大模块,分别是路径识别模块、单片机模块、驱动控制模块以及电源模块。软件设计部分总共分为四个部分,分别是总程序部分、中断部分、驱动控制部分和模拟总线部分。本设计的体统框图如图3-1所示。
ADC
电机1
电机2
电机3
电机4
驱动电路
STC89C52
电感1
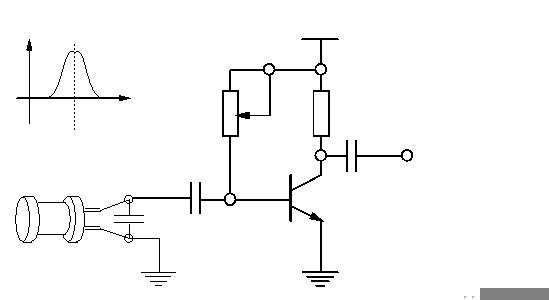
谐振放大
电感2
图3-1 系统总体设计框图
电感及与之相连的谐振放大电路组成了路径识别模块。作用是采集电磁信号,经过LC振荡电路和放大电路后产生相应的电压信号后,由AD转换芯片转成数字信号,送入单片机中。
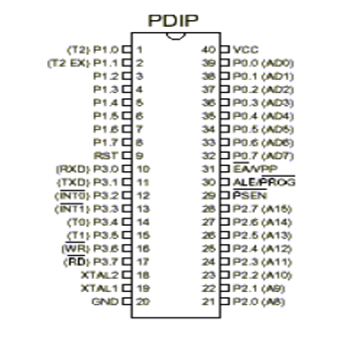
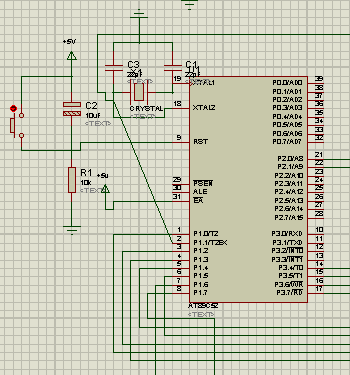
单片机模块用于串联起各个模块,有数据处理传输和下达指令等作用。在本设计中,单片机模块由STC89C52单片机和与之相连的PCF8591芯片共同组成。其中STC89C52是系统的处理部分,PCF8591是系统的AD采集部分。
驱动电路模块是整个设计的核心,本设计采用四驱形式,每个电机都可以单独控制,这样可以增加小车的灵活性,也方便数据调整。相对于两驱,四驱需要特别注意的是小车的运动逻辑和变速过程中的平衡问题,解决方案会在后文详细说明
电源模块,为系统提供一个稳定的直流电源,同时可以增加小车本身的质量,避免行驶时重心不稳翻车。本设计为整个小车提供了了一个稳压装置。用三节3.7v的干电池为整个系统及电动机供电。利用稳压装置将11.7v的电压降压至5V,作为单片机和驱动模块数字电压输入。
3.2路径识别模块
3.2.1路径识别原理
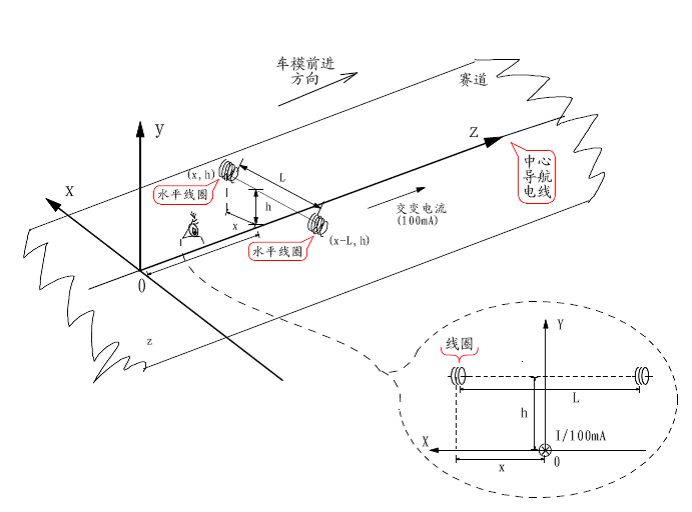
根据麦克斯韦电磁场理论我们知道,交变电流会在周围会产生交变的电磁场。本设计采用与智能小车竞赛一样的路径导航模式,采用20kHz的交流电流。导线周围的电磁场按照一定的规律分布。通过检测电磁场的强度和方向反过来我们可以确定测量点相对导线的空间位置,这正是电磁导航的原理和目的。
由于轨道导线和小车的尺寸l远远小于电磁波的波长λ,电磁场辐射的能量非常小(P正比于l的四次方),所以能够感应到的电磁波能量也很小。因此可以将导线周围的磁场近似为缓变的磁场,按照检测静态磁场的方法对其测量,获得周围的磁场分布。
根据毕奥-萨伐尔定律可知:在通有稳恒电流I,长度为L的直导线周围会产生磁场,距离导线为r处的点P磁感应强度为:
剩余内容已隐藏,请支付后下载全文,论文总字数:21506字
相关图片展示:
该课题毕业论文、开题报告、外文翻译、程序设计、图纸设计等资料可联系客服协助查找;

